【泡泡一分钟】开式集域自适应学习(ICCV2017-73)
每天一分钟,带你读遍机器人顶级会议
文章标题:Open Set Domain Adaptation
作者:Pau Panareda Busto,Juergen Gall
来源:International Conference on Computer Vision (ICCV 2017)
播音员:朱英
编译:王健 周平(79)
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

当训练和测试数据属于不同的域时,目标分类器的准确性显着降低。因此,过去几年中提出了许多降低数据集间域漂移的算法。但是,所有可使用的域自适应评估协议都描述了一个封闭的数据集识别任务,其中源域和目标域包含了完全相同的对象类别。本文工作中,基于在源域和目标域之间只共享了少数几个感兴趣类别的这类更现实情景,作者探索了开放数据集中的域自适应学习问题。并且,作者提出了一种在闭式和开式场景中都适用的方法。本文从解决标签分配问题中学习从源到目标集合的映射关系,其中标签分配问题是给那些可能在源数据中出现过的感兴趣类型的目标实例贴标签。经过全面的实验评估,可以表明:本文方法优于最先进的技术。
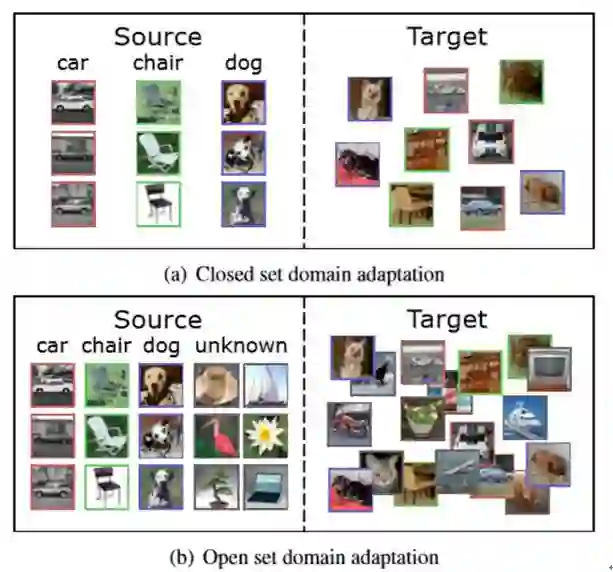
图1.(a)标准的域自适应基准测试认为源域和目标域仅包含同一组对象类的数据。因为不包括未知类或未在其他域中存在的类的图像,因此这表示闭式集的域适应。 (b)本文提出开放数据集域适应。在此设置中,源域和目标域都包含不属于感兴趣类别的图像。此外,目标域包含的图像与源域中的任何图像无关,反之亦然。

Abstract
When the training and the test data belong to different domains, the accuracy of an object classifier is significantly reduced. Therefore, several algorithms have been proposed in the last years to diminish the so called domain shift between datasets. However, all available evaluation protocols for domain adaptation describe a closed set recognition task, where both domains, namely source and target, contain exactly the same object classes. In this work, we also explore the field of domain adaptation in open sets, which is a more realistic scenario where only a few categories of interest are shared between source and target data. Therefore, we propose a method that fits in both closed and open set scenarios. The approach learns a mapping from the source to the target domain by jointly solving an assignment problem that labels those target instances that potentially belong to the categories of interest present in the source dataset. A thorough evaluation shows that our approach outperforms the state-of-the-art.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


