双目视觉 | 特征融合的双目半全局匹配算法

引用格式:
Lyu N Q, Song G H, Yang B W . Semi-global stereo matching algorithm based on feature fusion and its CUDA implementation[J]. Journal of Image and Graphics, 2018, 23(6): 874-886.
吕倪祺, 宋广华, 杨波威. 特征融合的双目半全局匹配算法及其并行加速实现[J]. 中国图象图形学报, 2018, 23(6): 874-886.
DOI: 10.11834/jig.170157
原文链接:

导语:在微小飞行器、小型机器人等嵌入式系统中,如何实时获取高质量深度信息是实现环境感知、自主避障的关键问题。在体积功耗的限制下,应用场景的速度和精度要求使这个问题变得极具挑战。
1. 本文设计了基于特征融合的双目SGM匹配算法并在GPU平台上进行了实现。
2. 利用GPU特性,对立体匹配中的各个步骤使用共享内存、SIMD及混合流水线优化以提高运行速度。
使用沿极线方向的一维差分计算纹理信息,使用中心平均Census特征及AD特征进行代价计算,通过纹理优化的SGM算法聚合代价并获得初始视差图;然后,通过左右一致性检验检查剔除粗略视差图中的不稳定点和遮挡点,使用线性插值和中值滤波对视差图中的空洞进行填充;最后,利用GPU特性,对立体匹配中的代价计算、半全局匹配(SGM)计算、视差计算等步骤使用共享内存、单指令多数据流(SIMD)及混合流水线进行优化以提高运行速度。
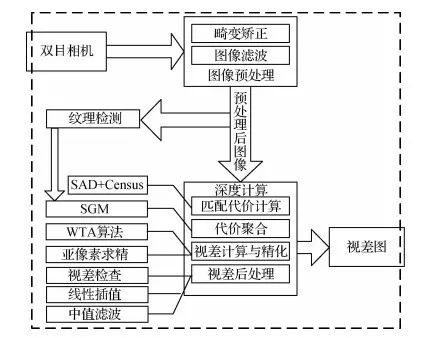
▲本文算法流程图
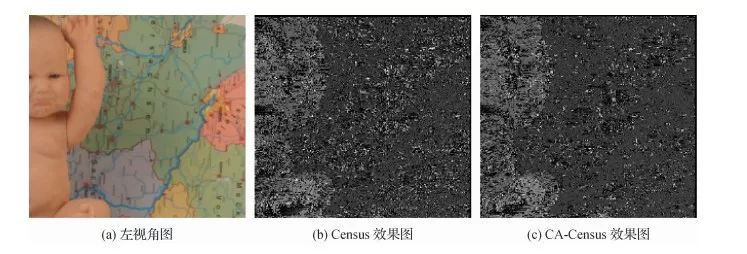
▲匹配代价计算效果对比
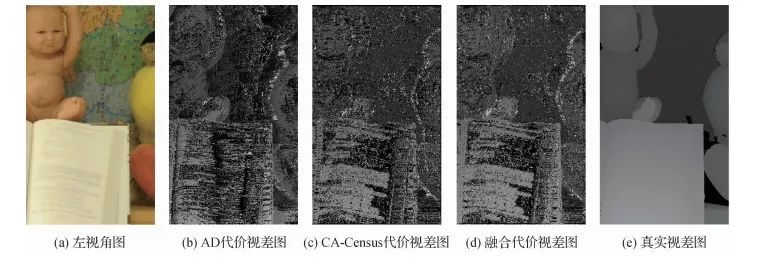
▲代价融合结果对比示意图
对于双目匹配而言,低纹理区域的匹配是性能提升的关键。使用灰度梯度作为纹理信息。对图像提取垂直方向和水平方向的梯度,可观察到纹理信息。
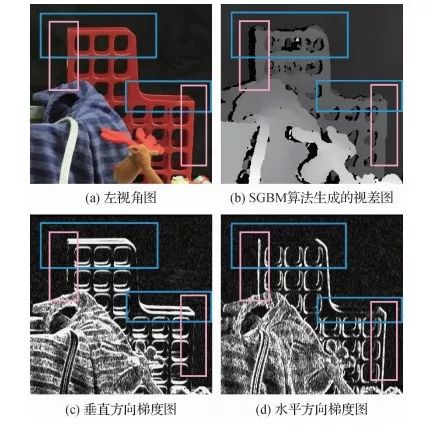
▲纹理信息示意图
在Quarter Video Graphics Array(QVGA)分辨率的middlebury双目图像测试集中,本文提出的ADCC-TSGM算法总坏点率较Semi-Global Block Matching(SGBM)算法降低36.1%,较SGM算法降低28.3%;平均错误率较SGBM算法降低44.5%,较SGM算法降低49.9%。
GPU加速实验基于NVIDIA Jetson TK1嵌入式计算平台,在双目匹配性能不变的情况下,通过使用CUDA并行加速,可获得117倍以上加速比,即使相较于已进行SIMD及多核并行优化的SGBM,运行时间也减少了85%。
在QVGA分辨率下,GPU加速后的运行帧率可达31.8帧/s。本文算法及其CUDA加速可为嵌入式平台提供一种实时获取高质量深度信息的有效途径,可作为微小飞行器、小型机器人等设备进行环境感知、视觉定位、地图构建的基础步骤。
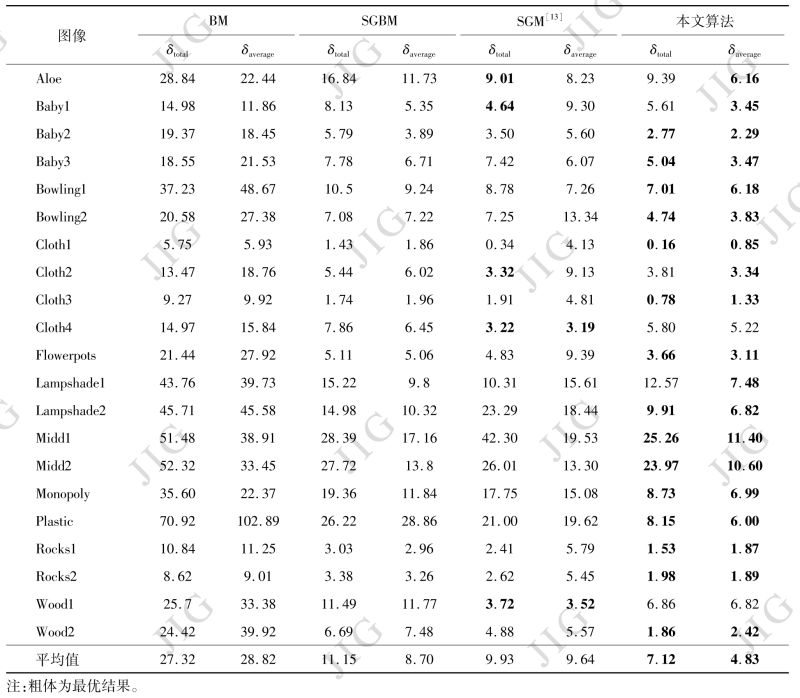
▲不同算法的总坏点率与平均错误率
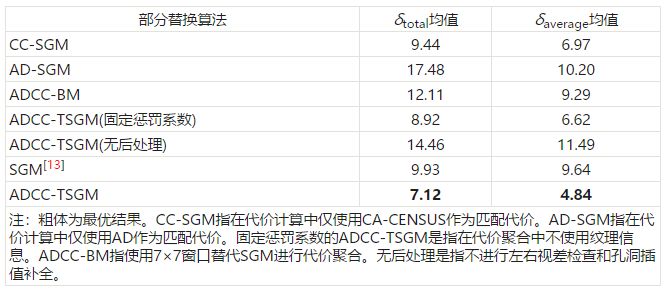
▲算法精简后的总坏点率平均值与平均错误率均值
双目立体匹配算法
双目立体匹配算法可分为特征匹配和稠密匹配。特征匹配使用特征点进行左右视图的像素点匹配,计算精度较高,但所得的深度信息稀疏,并不适合复杂场景。对于稠密匹配算法,Scharstein等人进行了详细分类和评价[1],提出了现有立体匹配算法的4大模块,即匹配代价计算、代价/支持聚合、视差计算/最优化以及视差校正。一般而言,稠密匹配的双目视觉处理流程图下图所示。

▲双目视觉处理流程图
参考文献:Scharstein D, Szeliski R. A taxonomy and evaluation of dense two-frame stereo correspondence algorithms[J]. International Journal of Computer Vision, 2002, 47(1-3): 7–42. [DOI:10.1023/A:1014573219977]
第一作者

通信作者

研究所简介
浙江大学航空航天学院空天信息技术研究所成立于2007年,依托空天信息技术二级学科博士点。研究所支持航空航天数值模拟与验证教育部重点实验室(B类)的建设。空天信息技术为浙江大学自主设置的二级学科,归属于计算机科学与技术一级学科,由浙江大学航空航天学院与浙江大学计算机学院共同建设。研究所现有教师8人,其中教授/博士生导师2人,副教授6人。
研究所主要研究方向有航空航天计算工程、无人机指挥控制技术、无人机智能化与网络化技术、无人机视觉导航、天地一体化信息网络、飞行器综合控制技术、科学可视化、虚拟现实与遥操作技术、飞行器信息获取与处理技术等。研究所自成立以来承担了包括军工973项目、国防基础科研项目、科技部支撑计划项目、国家自然科学基金项目、航天创新基金项目等各类项目。
前沿丨观点丨咨讯丨独家
扫描下方二维码 关注学报公众号

中国图象图形学报 | 订阅号



