【泡泡一分钟】可能未知:雷达中的深度逆向传感器建模
每天一分钟,带你读遍机器人顶级会议文章
标题:Probably Unknown: Deep Inverse Sensor Modelling In Radar
作者:Rob Weston, Sarah Cen, Paul Newman and Ingmar Posner
来源:IEEE International Conference on Robotics and Automation (ICRA),2019
编译:孙钦
审核:黄思宇,孙钦
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

雷达能够在各种天气条件下远距离探测物体,这为自动驾驶汽车应用中的激光雷达和视觉提供了一种很有前景的替代方案。然而,由于传感器噪声和遮挡之间的复杂相互影响,从原始雷达功率的返回中区分占用和空闲的空间是具有挑战性的。
为了解决这个问题,我们提出了学习逆向传感器模型(ISM),使用深度神经网络将原始雷达扫描转换为占用概率栅格地图。我们的网络使用激光雷达生成的部分占用标签进行自我监督,它允许机器人从过去的经验中学习世界的占用情况,而无需人工监督。我们通过在动态城市环境中记录的五小时的数据来评估我们的方法。通过考虑每个栅格单元的场景上下文,我们的模型优于标准的CFAR滤波方法,能够成功地将世界划分为占用的和空闲的空间。此外,通过将异方差不确定性纳入我们的模型公式,我们能够量化整个传感器观察中不确定性的方差。通过这种机制,我们能够成功地识别可能被遮挡的空间区域。
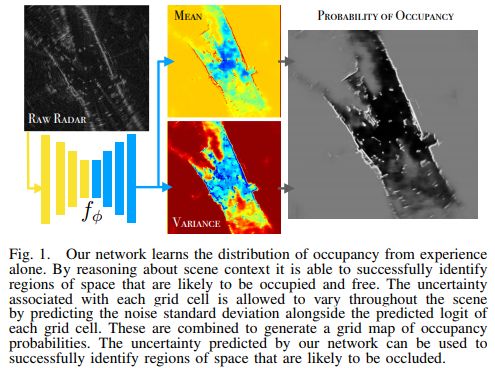
图1 我们的网络仅从经验中学习占用的分布。
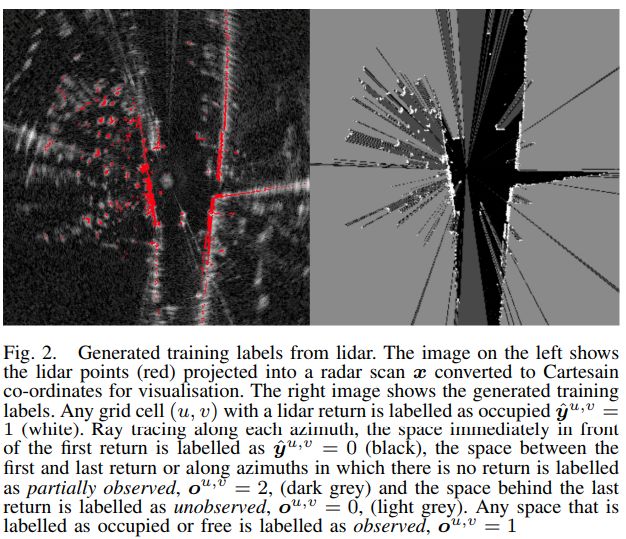
图2 从激光雷达数据总生产的训练标签。
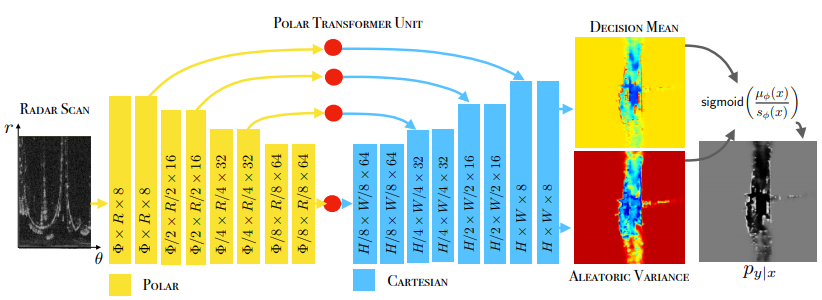
图3 本方法的网络架构。
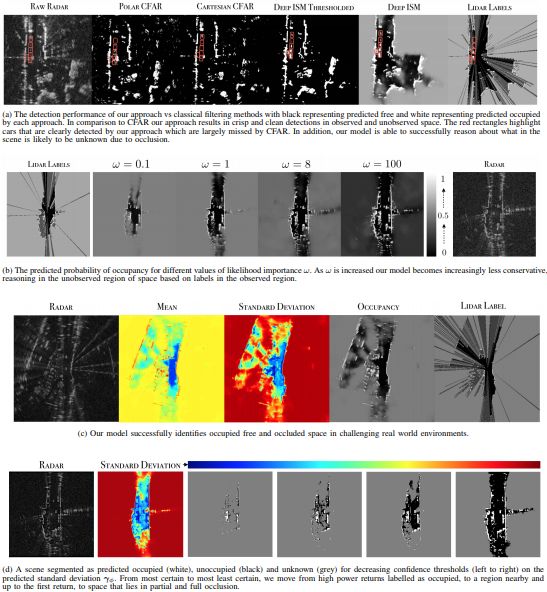
图4 a)本文方法与经典的滤波方法CFAR的检测性能比较(黑色代表预测的自由空间,白色代表预测的占用空间);b)对于不同似然重要性值ω的预测占用概率。随着ω的增加,我们的模型变得越来越不保守;c)本文模型在具有挑战性的真实世界环境中成功地识别出了占用的空间和封闭的空间;d)在预测的标准偏差γφ上(从左到右)减小置信度阈值的场景被分割为预测占用(白色),未占用(黑色)和未知(灰色)区域。
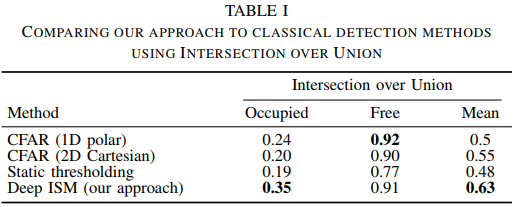
表1 本文方法与经典的检测方法的对比。

Abstract
Radar presents a promising alternative to lidar and vision in autonomous vehicle applications, able to detect objects at long range under a variety of weather conditions. However, distinguishing between occupied and free space from raw radar power returns is challenging due to complex interactions between sensor noise and occlusion.
To counter this we propose to learn an Inverse Sensor Model(ISM) converting a raw radar scan to a grid map of occupancy probabilities using a deep neural network. Our network is self-supervised using partial occupancy labels generated by lidar, allowing a robot to learn about world occupancy from past experience without human supervision. We evaluate our approach on five hours of data recorded in a dynamic urban environment. By accounting for the scene context of each grid cell our model is able to successfully segment the world into occupied and free space, outperforming standard CFAR filtering approaches. Additionally by incorporating heteroscedastic uncertainty into our model formulation, we are able to quantify the variance in the uncertainty throughout the sensor observation. Through this mechanism we are able to successfully identify regions of space that are likely to be occluded.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





