高斯YoloV3目标检测(文中供源码链接)
点击蓝字关注我们


扫码关注我们
公众号 : 计算机视觉研究院
扫码回复:高斯yolov3,获取下载链接
概述
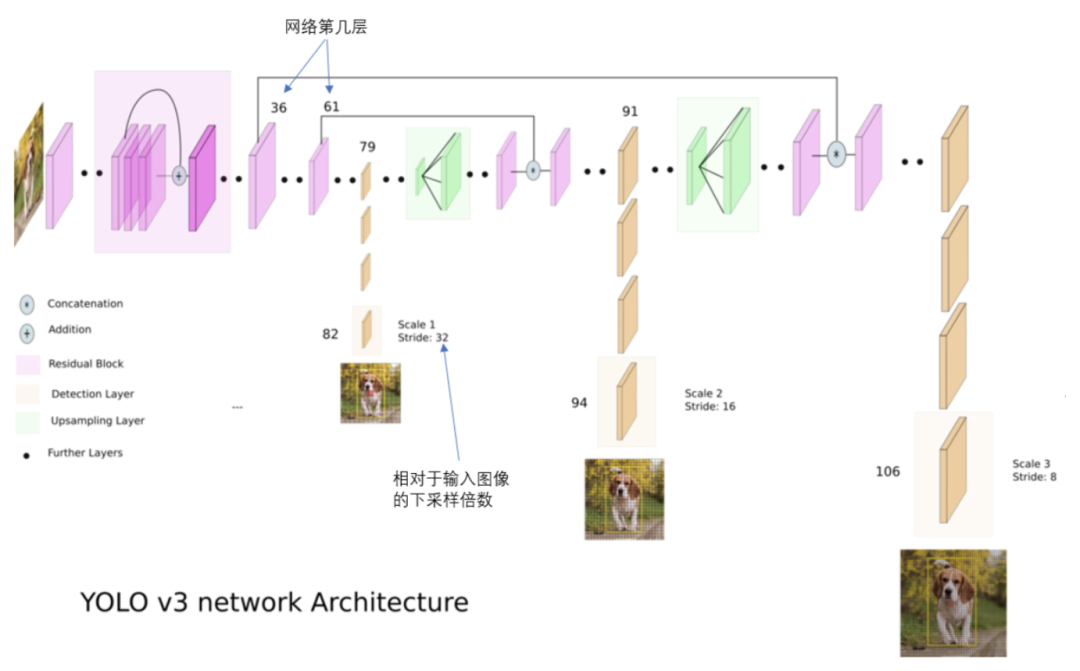
模型
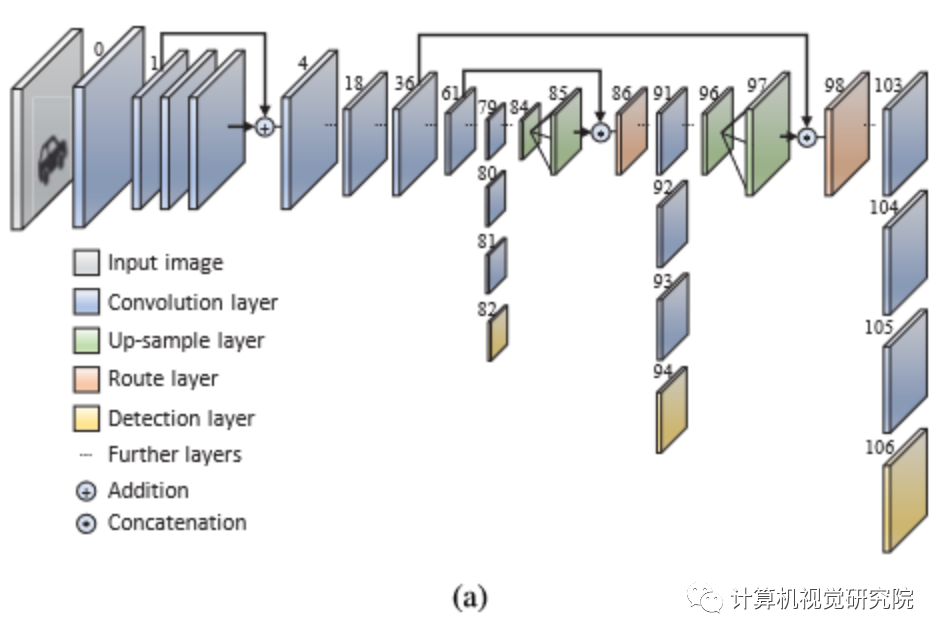
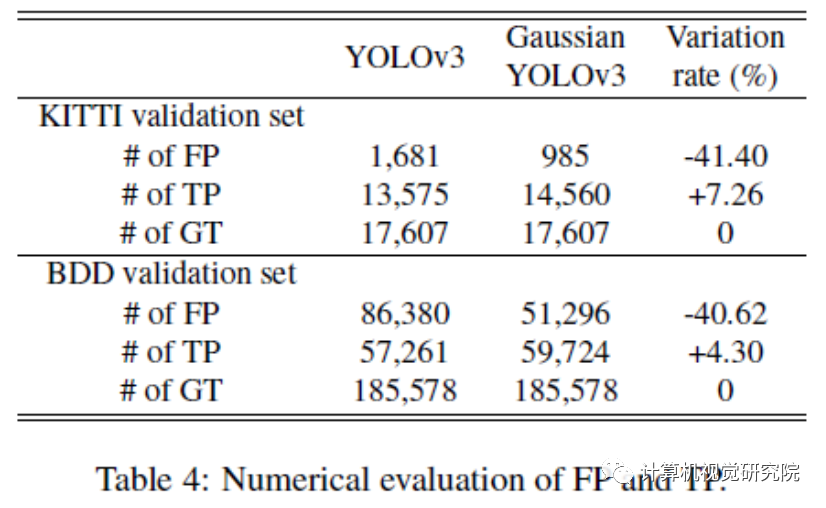
yolov3识别出的目标类别是有置信度的,但目标框只有位置而没有置信度,也就是说,从结果中无法预知当前目标框的可靠性。基于这一点,高斯yolov3利用Gaussian模型来对网络输出进行建模,在基本不改变yolov3网络结构和计算量的情况下,能够输出每个预测框的可靠性,并且在算法总体性能上提升了3个点的MAP。


Guassian YOLOv3介绍
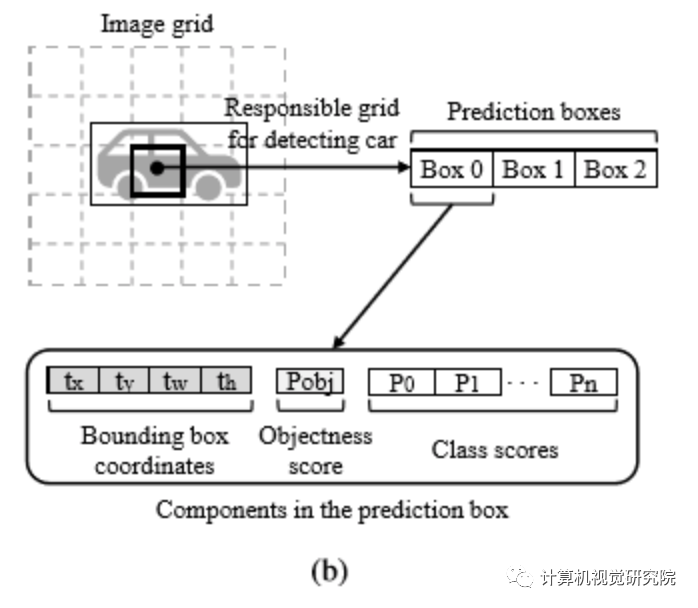
如图所示,Guassian YOLOv3通过增加网络的输出,和改进网络的损失函数,实现了对预测框可靠性的输出。

-
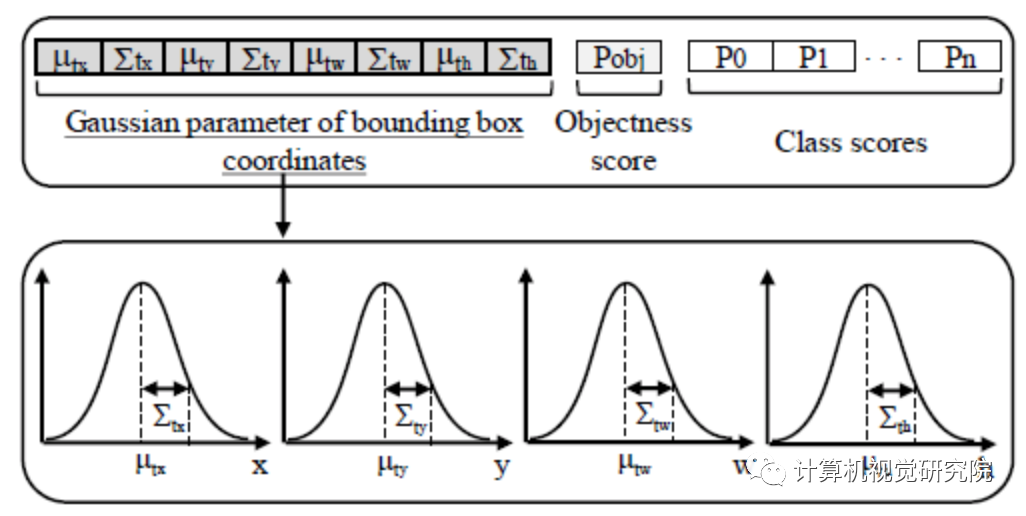
新的预测输出
-
新的损失函数
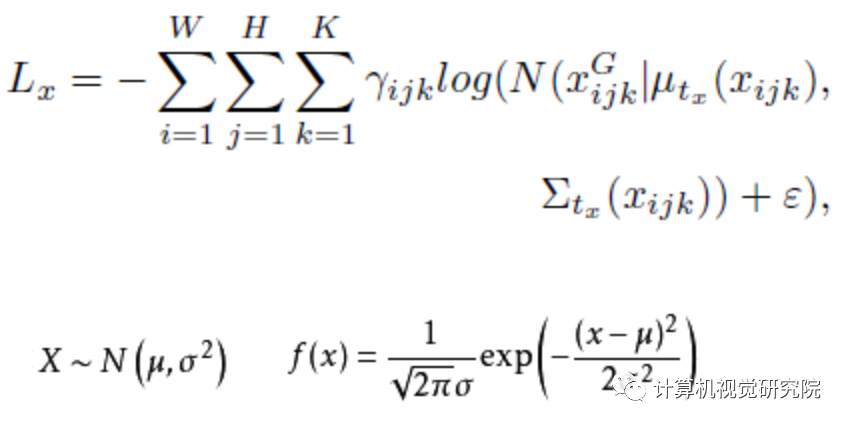
由于Gaussian YOLOv3的输出进行了调整,与之对应的损失函数的计算也会做相应的调整。与原始的YOLOv3相比,仅仅调整了预测框坐标位置的回归策略。如下代码对比所示,原始的YOLOv3进行box回归时,由于网络预测输出就是坐标本身,因此计算梯度时就利用了均方误差的方式。而由于Gaussian YOLOv3输出的是均值和方差,因此在计算梯度时就结合了高斯分布的策略。
GT值的计算

最终的预测输出


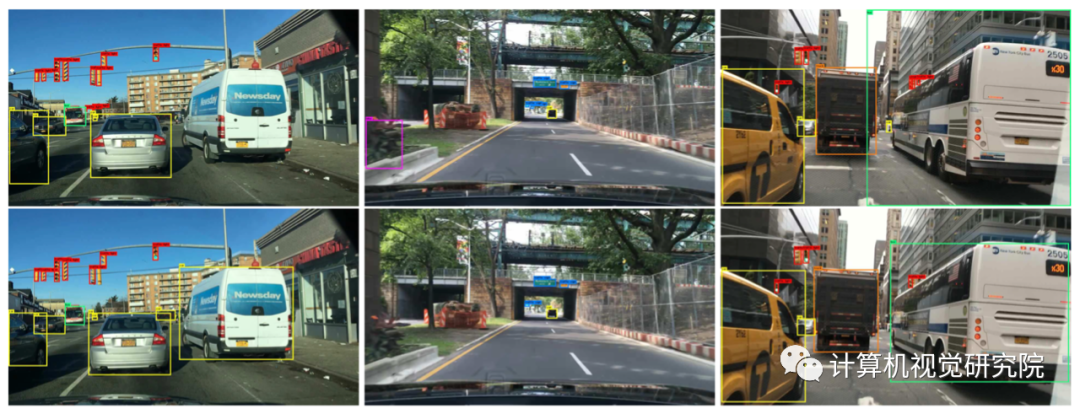
对比结果




扫码关注我们
公众号 : 计算机视觉研究院
扫码回复:高斯yolov3,获取下载链接
登录查看更多
相关内容

Arxiv
3+阅读 · 2019年3月20日
Arxiv
4+阅读 · 2018年7月4日




相关VIP内容
相关资讯
相关论文
Arxiv
3+阅读 · 2019年3月20日
Arxiv
4+阅读 · 2018年7月4日