进化历程详解:YOLOv1到YOLOv3
加入极市专业CV交流群,与6000+来自腾讯,华为,百度,北大,清华,中科院等名企名校视觉开发者互动交流!更有机会与李开复老师等大牛群内互动!
同时提供每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。关注 极市平台 公众号 ,回复 加群,立刻申请入群~
作者:fivetrees
https://zhuanlan.zhihu.com/p/75106112
本文已获作者授权,未经允许,不得二次转载
【前言】:2013年,R-CNN横空出世,目标检测DL世代大幕拉开。
各路豪杰快速迭代,陆续有了SPP,Fast,Faster版本,至R-FCN,速度与精度齐飞,区域推荐类网络大放异彩。
奈何,未达实时检测之基准,难获工业应用之青睐。
此时,凭速度之长,网格类检测异军突起,先有YOLO,继而SSD,更是摘实时检测之桂冠,与区域推荐类二分天下。然准确率却时遭世人诟病。
遂有JR一鼓作气,并coco,推v2,增加输出类别,成就9000。此后一年,作者隐遁江湖,逍遥twitter。偶获灵感,终推v3,横扫武林!。(很喜欢这段描述,引用自大神这里,文采斐然,膜拜大佬)
本文主要讲YOLOv1-YOLOv3的进化历程,文章如有不对的地方,还望大佬告知。
YOLOv1
https://pjreddie.com/media/files/papers/yolo.pdf
1. 基本思想
YOLOv1是典型的目标检测one stage方法,用回归的方法去做目标检测,执行速度快,达到非常高效的检测,其背后的原理和思想也非常简单。YOLOv1的基本思想是把一副图片,首先reshape成448x448大小(由于网络中使用了全连接层,所以图片的尺寸需固定大小输入到CNN中),然后将划分成SxS个单元格(原文中S=7),以每个格子所在位置和对应内容为基础,来预测:
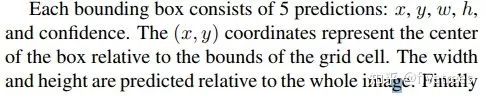
1)检测框,包含物体框中心相对其所在网格单元格边界的偏移(一般是相对于单元格左上角坐标点的位置偏移,以下用x,y表示)和检测框真实宽高相对于整幅图像的比例(注意这里w,h不是实际的边界框宽和高),每个格子预测B个检测框(原文中是2),如下图;
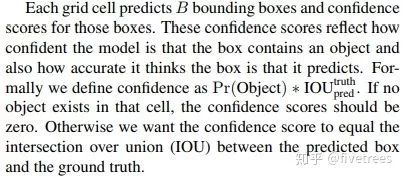
2)每个框的Confidence,这个confidence代表了预测框含有目标的置信度和这个预测框预测的有多准2重信息,公式和说明如下:

3)每个格子预测一共C个类别的概率分数,并且这个分数和物体框是不相关的,只是基于这个格子。
注意(重要细节):
1. x,y,w,h,confidence都被限制在区间[0,1]。
2. 置信度confidence值只有2种情况,要么为0(边界框中不含目标,P(object)=0),要么为预测框与标注框的IOU,因为P(Object)只有0或1,两种可能,有目标的中心落在格子内,那么P(object)=1,否则为0,不存在(0,1)区间中的值。其他论文中置信度的定义可能跟YOLOv1有些不同,一般置信度指的是预测框中是某类别目标的概率,在[0,1]之间。
3. 每个格子预测C个类别的概率分数,而不是每个每个检测框都需要预测C个类别的概率分数。
具体实现见图:
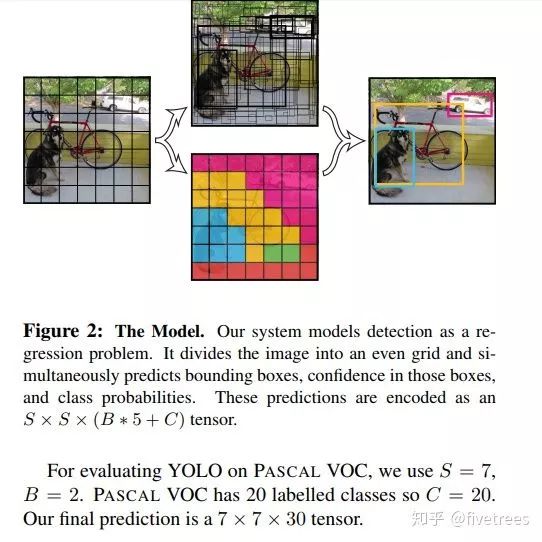
综上所述:每个格子需要输出的信息维度是Bx(4+1)+C=Bx5+C。在YOLO的论文中,S=7,B=2,C是PASCAL VOC的类别数20,所以最后得到的关于预测的物体信息是一个7x7x30的张量。最后从这7x7x30的张量中提取出来的预测框和类别预测的信息经过NMS,就得到了最终的物体检测结构。
2. 网络结构
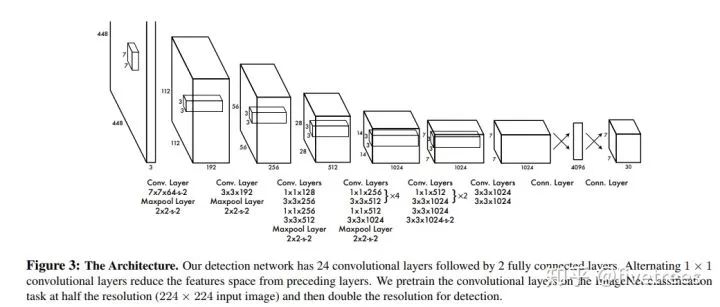
分析:作者的网络结构受GoogleNet启发,将GoogleNet中的Inception模块换成了1x1卷积后接3x3卷积,最终网络结构由24个卷积层和4个最大池化层和2个全连接层组成。
3. 损失函数
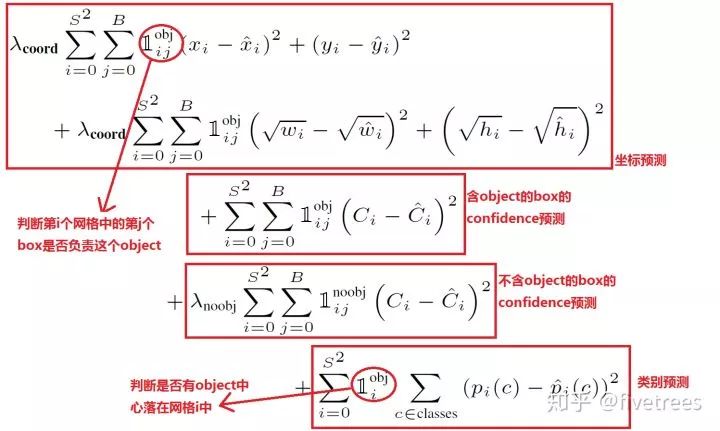
损失函数设计细节:
YOLOv1对位置误差,confidence误差,分类误差均使用了均方差作为损失函数。
三部分误差损失(位置误差,confidence误差,分类误差),在损失函数中所占权重不一样,位置误差权重系数最大,为5。
由于一副图片中没有目标的网格占大多数,有目标的网格占少数,所以损失函数中对没有目标的网格中预测的bbox的confidence误差给予小的权重系数,为0.5。
有目标的网格中预测的bbox的confidence损失和分类损失,权重系数正常为1。
由于相同的位置误差对大目标和小目标的影响是不同的,相同的偏差对于小目标来说影响要比大目标大,故作者选择将预测的bbox的w,h先取其平方根,再求均方差损失。
一个网格预测2个bbox,在计算损失函数的时候,只取与ground truth box中IoU大的那个预测框来计算损失。
分类误差,只有当单元格中含有目标时才计算,没有目标的单元格的分类误差不计算在内。
4. 激活函数
最后一层全连接层用线性激活函数
其余层采用leak RELU
5. YOLOv1的缺陷
首先,每个单元格只预测2个bbox,然后每个单元格最后只取与gt_bbox的IOU高的那个最为最后的检测框,也只是说每个单元格最多只预测一个目标,若单个单元格有多个目标时,只能检测出其他的一个,导致小目标漏检,因此YOLOv1对小目标检测效果不好。
其次,虽然YOLOv1中损失函数中位置误差,对预测的w,h取平方根处理再求均方差,来缓解相同位置误差对大目标,小目标影响不同的弊端,但是作用甚微,没有根本解决问题对于小物体。小的目标的 置信度误差也会对网络优化过程造成很大的影响,从而降低了物体检测的定位准确性。
由于输出层为全连接层,因此在检测时,YOLO 训练模型只支持与训练图像相同的输入分辨率的图片。
YOLOv2
https://arxiv.org/pdf/1612.08242v1.pdf
1. 介绍
YOLOv2又叫YOLO9000,其能检测超过9000种类别的物体,在VOC2007数据集中在76FPS的速度下,能达到76.8%的mAP,在40FPS的速度下,能达到78.6%的mAP,很好的达到速度与精度的平衡。
2.相比于v1的改进
算法层面:
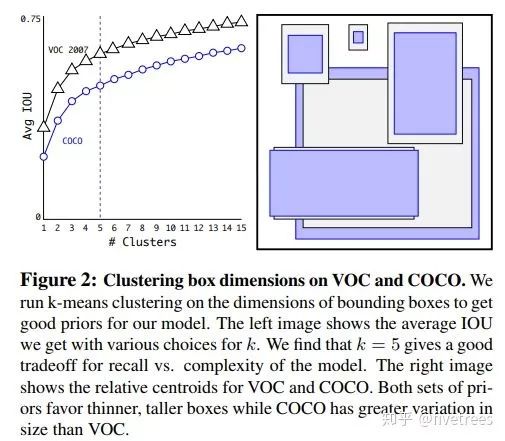
Anchor:引入了Faster R-CNN中使用的Anchor(猜想,Anchor是我们作目标检测的载体,最后预测的检测框位置是在Anchor的基础上进行回归的,作者认为可能比v1中的无Anchor回归效果更好,不过最近也有大量的Anchor Free文章出现,过段时间我再总结一下),注意这里作者在YOLOv2中设计的Anchor并不是像Faster R-CNN中人为事先设计的尺寸和高宽比一级个数,作者通过在所有训练图像的所有边界框上运行k-means聚类来选择锚的个数和形状(k = 5,因此它找到五个最常见的目标形状)。因此,YOLO的锚是特定于您正在训练(和测试)的数据集的。k-means算法找到了将所有数据点划分聚类的方法。这里的数据点是数据集中所有真实边界框的宽度和高度。但5个锚是否最佳选择?我们可以在不同数量的聚类上多次运行k-means,并计算真实标签框与它们最接近的锚框之间的平均IOU。毫无疑问,使用更多质心(k值越大)平均IOU越高,但这也意味着我们需要在每个网格单元中使用更多的检测器,并使模型运行速度变慢。对于YOLO v2,他们选择了5个锚作为召回率和模型复杂度之间的良好折衷。
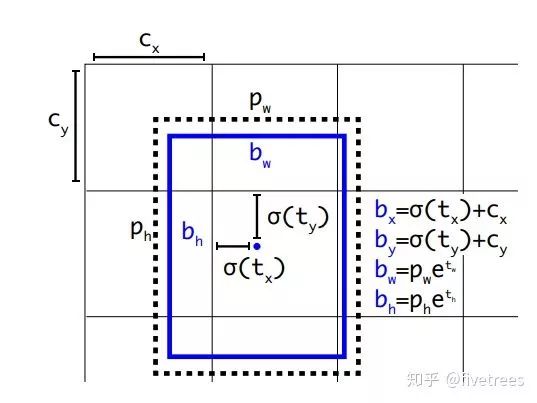
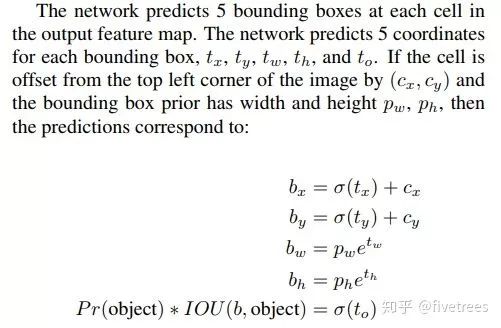
坐标预测:在这里作者虽然引入了Faster R-CNN中类似的anchor,但是作者并没有像其意义,对bbox中心坐标的预测是基于anchor坐标的偏移量得到的,而是采用了v1中预测anchor中心点相对于对于单元格左上角位置的偏移,如下图:
损失函数:
1.在计算类概率误差时,YOLOv1中仅对每个单元格计算;而YOLOv2中对每一个anchor box都会计算类概率误差。
2.YOLOv1中使用w和h的开方来缓和box的尺寸不平衡问题,而在YOLOv2中则通过赋值一个和w,h相关的权重函数达到该目的。
3.与YOLOv1不同的是修正系数的改变,YOLOv1中no_objects_loss和objects_loss分别是0.5和1,而YOLOv2中则是1和5
具体可以参考下方链接,或者直接去作者的个人网站查看源码:
https://blog.csdn.net/qq_42422981/article/details/90105149
网络层面:
Darknet19: 与v1不同采用的是全卷积网络,取掉了v1中的全连接层,改用全局平均池化,去掉v1中最后一个池化层,增加特征的分辨率。网络共19个卷积层,5个最大池化层,具体结构见下图

训练检测方面:
训练图像分辨率:v1在ImageNet上预训练时用的224x224尺寸的图片,正式训练时用448x448,这需要模型适应新的分辨率。YOLOv2是直接使用448x448的输入训练,随着输入分辨率的增加,模型提高了4%的mAP。
使用了WordTree:通过WordTree来混合检测数据集与识别数据集之中的数据,使得这一网络结构可以实时地检测超过9000种物体分类。
联合训练算法:使用这种联合训练技术同时在ImageNet和COCO数据集上进行训练。YOLO9000进一步缩小了监测数据集与识别数据集之间的代沟。联合训练算法的基本思路就是:同时在检测数据集和分类数据集上训练物体检测器(Object Detectors ),用检测数据集的数据学习物体的准确位置,用分类数据集的数据来增加分类的类别量、提升健壮性。分类信息学习自ImageNet分类数据集,而物体位置检测则学习自COCO检测数据集。
多尺度训练:为了提高模型的鲁棒性,在训练的时候采用了多尺度的输入进行训练,由于网络的下采样因子是32,故输入尺寸选择32的倍数288,352,...,544
多尺度检测,reorg层:作者将前一层的26*26的特征图做一个reorg操作,将其变成13*13但又不破坏其大特征图的特征,然后和本层的13*13的1特征图进行concat。
技巧方面:
Batch Normalization:使用Batch Normalization对网络进行优化,让网络提高了收敛性,同时还消除了对其他形式的正则化(regularization)的依赖。通过对YOLO的每一个卷积层增加Batch Normalization,最终使得mAP提高了2%,同时还使model正则化。使用Batch Normalization可以从model中去掉Dropout,而不会产生过拟合。
YOLOv3
https://link.zhihu.com/?target=https%3A//pjreddie.com/media/files/papers/YOLOv3.pdf
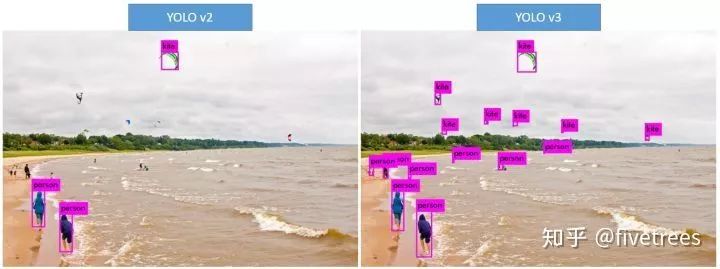
先看YOLOv3的几张目标检测效果图吧,效果真实好!YOLO一直以来被诟病的对小目标检测效果不好,进步提升明显。

改进点
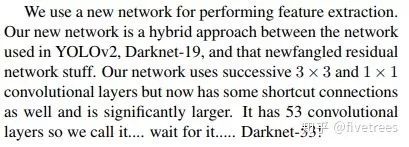
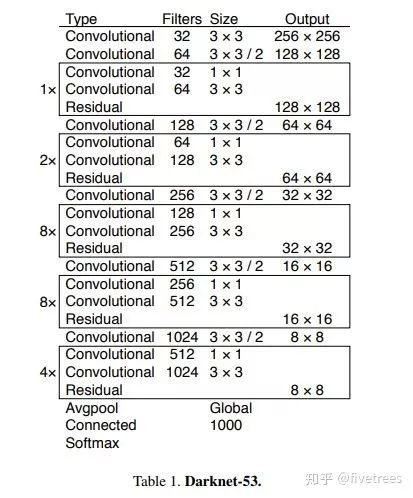
网络:Darknet53,采用简化的residual block 取代了原来 1×1 和 3×3的block; (其实就是加了一个shortcut,也是网络加深必然所要采取的手段)。这和上一点是有关系的,v2的darknet-19变成了v3的darknet-53,为啥呢?就是需要上采样啊,卷积层的数量自然就多了,另外作者还是用了一连串的3*3、1*1卷积,3*3的卷积增加channel,而1*1的卷积在于压缩3*3卷积后的特征表示。
分类损失:在YOLOv3中,每个框用多标签分类来预测边界框可能包含的类。该算法将v2中的softmax替换成了逻辑回归loss,在训练过程中使用二原交叉熵损失来进行类别预测。对于重叠的标签,多标签方法可以更好的模拟数据。
跨尺度预测:YOLOv3采用多个尺度融合的方式做预测。原来YOLOv2中有一个层叫:passthrough layer,假设最后提取的特征图尺度是13*13,那么这个层的作用就是将前面一层的26*26的特征图和本层13*13的特征图进行连接,有点像ResNet。这样的操作是为了加强YOLO算法对小目标检测的精度。在YOLOv3中,作者采用了类似与FPN的上采样和融合做法(最后融合了3个尺度,其他2个尺度分别是26*26和52*52),在多给尺度的特征图上做预测,对于小目标的提升效果还是非常明显的。虽然在YOLOv3中每个网格预测3个边界框,比v2中的5个要少,但v3采用了多个尺度的特征融合,所以边界框的数量也比之前多很多。
与其他网络对比
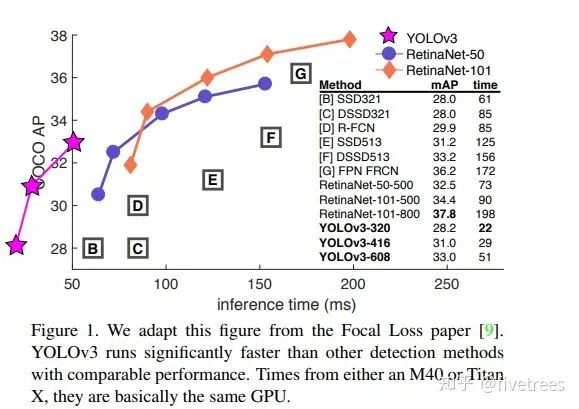
mAP和相同GPU下的单张图片所需时间
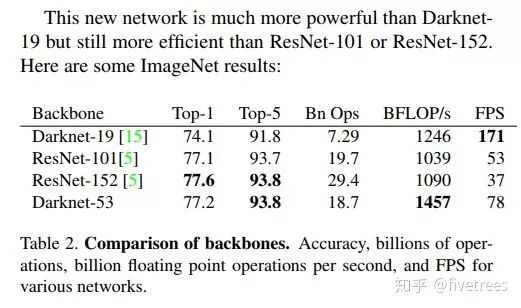
Darknet53与其他backbone对比(256×256的图片,并进行单精度测试。运行环境为Titan X)
尝试,但效果不好的工作
Anchor box坐标的偏移预测。作者尝试了常规的Anchor box预测方法,比如利用线性激活将坐标x、y的偏移程度预测为边界框宽度或高度的倍数。但发现这种做法降低了模型的稳定性,且效果不佳。 用线性方法预测x,y,而不是使用逻辑方法。我们尝试使用线性激活来直接预测x,y的offset,而不是逻辑激活,还降低了mAP。
focal loss。我们尝试使用focal loss,但使我们的mAP降低了2%。 对于focal loss函数试图解决的问题,YOLOv3从理论上来说已经很强大了,因为它具有单独的对象预测和条件类别预测。因此,对于大多数例子来说,类别预测没有损失?或者其他的东西?我们并不完全确定。
双IOU阈值和真值分配。在训练期间,Faster RCNN用了两个IOU阈值,如果预测的边框与ground truth的IoU>0.7,那它是个正样本;如果在[0.3,0.7]之间,则忽略;如果和ground truth的IoU<0.3,那它就是个负样本。作者尝试了这种思路,但效果并不好。
总结
YOLO系列算法不断吸收目标检测同类算法的优点,如FPN,Faster-RCNN,ResNet,,将其应用与自身,不断进步,取得了较高的检测速度和检测精度,相比于其他算法更符合工业界对目标检测算法实时性的要求,简单易实现,对于嵌入式很友好,期待下一代的YOLO算法!如有错误,还望告知!
-完-
*延伸阅读
添加极市小助手微信(ID : cv-mart),备注:研究方向-姓名-学校/公司-城市(如:目标检测-小极-北大-深圳),即可申请加入目标检测、目标跟踪、人脸、工业检测、医学影像、三维&SLAM、图像分割等极市技术交流群,更有每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流,一起来让思想之光照的更远吧~

△长按添加极市小助手

△长按关注极市平台
觉得有用麻烦给个在看啦~



