【泡泡一分钟】神经人体搜索机(ICCV2017-50)
每天一分钟,带你读遍机器人顶级会议文章
标题:Neural Person Search Machines
作者:Hao Liu, Jiashi Feng, Zequn Jie, Karlekar Jayashree, Bo Zhao, Meibin Qi, Jianguo Jiang, Shuicheng Yan
来源:International Conference on Computer Vision (ICCV 2017)
播音员:糯米
编译:李建禹(52)
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天给大家介绍的文章是神经人体搜索机,这篇文章来自ICCV2017。
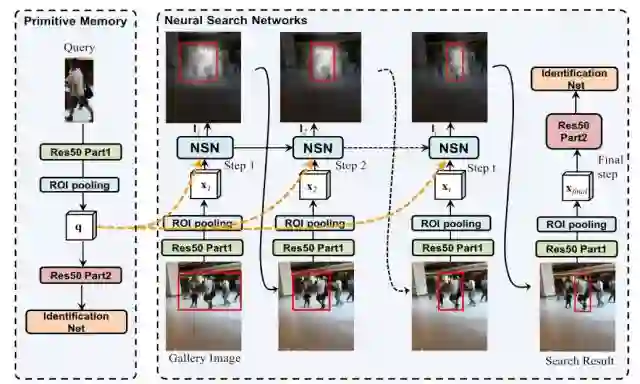
本文研究了在原始图片中的人体区域搜索问题。与将查询目标与待选区域逐一比较这种盲选方式相比,本文提出了通过充分利用查询目标和在每次迭代搜索中的上下文线索中的信息来递归缩小整个图像中的搜索区域直到实现人体目标的精确定位的方法。作者开发了神经人体搜索机(NPSM,Neural Person Search Machines)来实现这种递归定位的人体搜索。得益于它的神经搜索机制,NPSM能够选择性地将焦点从分散区域收缩到包含目标的更集中的区域中。在这个过程中,NPSM采用内部原始记忆组件来记忆查询目标的表达,该表达会调节注意力并增强其对其他干扰区域的鲁棒性。对两个基准数据集CUHK-SYSU人体搜索数据集和PRW数据集的评估表明,本文的方法在mAP和top-1评估准则下,均可以优于现有的最好方法。
本文的框架如下图:
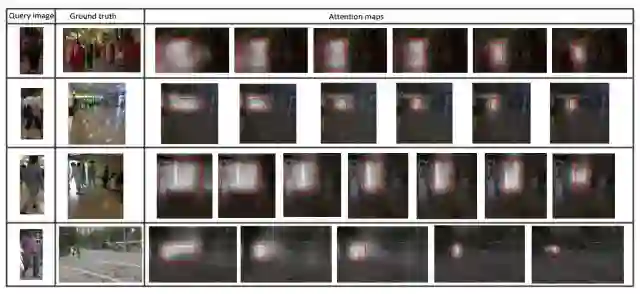
下面是本文方法提到的注意力图的一个展示,前三行来自数据集CUHK SYSU,最后一行是PRW。绿色框代表了正确的人体区域,而红色框是由本文的NPSM模型选出的区域边界框。

Abstract
We investigate the problem of person search in the wild in this work. Instead of comparing the query against all candidate regions generated in a query-blind manner, we propose to recursively shrink the search area from the whole image till achieving precise localization of the target person, by fully exploiting information from the query and contextual cues in every recursive search step. We develop the Neural Person Search Machines (NPSM) to implement such recursive localization for person search. Benefiting from its neural search mechanism, NPSM is able to selectively shrink its focus from a loose region to a tighter one containing the target automatically. In this process, NPSM employs an internal primitive memory component to memorize the query representation which modulates the attention and augments its robustness to other distracting regions. Evaluations on two benchmark datasets, CUHK-SYSU Person Search dataset and PRW dataset, have demonstrated that our method can outperform current state-of-the-arts in both mAP and top-1 evaluation protocols.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



