【泡泡一分钟】SfM-Net:从视频中学习结构和运动
每天一分钟,带你读遍机器人顶级会议文章
标题:SfM-Net:Learning of Structure and Motion from Video
作者:Sudheendra Vijayanarasimhan, Susanna Ricco, Cordelia Schmid, Rahul Sukthankar, and Katerina Fragkiadaki
来源:arXiv:1704.07804 (arXiv2017)
播音员:王肃
编译:陈建华
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——SfM-Net:从视频中学习结构和运动,该文章发表于arXiv2017。
在本文中,作者提出了SfM-Net。SfM-Net是一种用于视频运动估计的几何感知神经网络,该网络根据场景和物体深度,相机运动以及三维物体旋转和平移来分解帧与帧之间的像素运动。给定一组序列帧,SfM-Net能够预测深度、分割、相机以及刚性物体的运动,并且把这些转换成稠密的帧间运动场(光流),进而通过对图像帧的扭曲变换以进行像素匹配以及反向传播等工作。
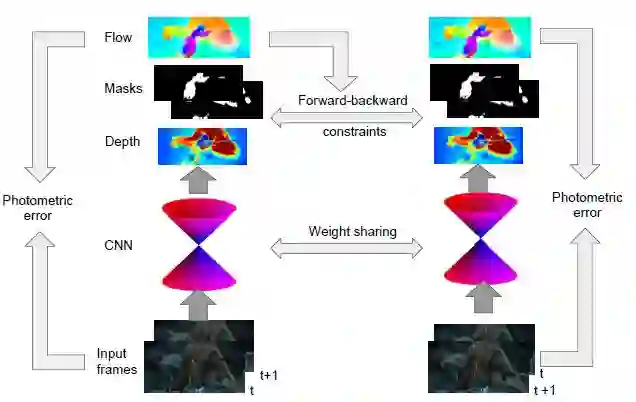
图1 SfM-Net的系统流程图
本文提出的模型可以进行不同监督程度的训练:1)通过重投影光度误差进行自我监督(完全无监督),2)通过自身运动(相机运动)进行监督,或者3)通过深度进行监督(例如,RGB-D传感器提供的深度信息)。
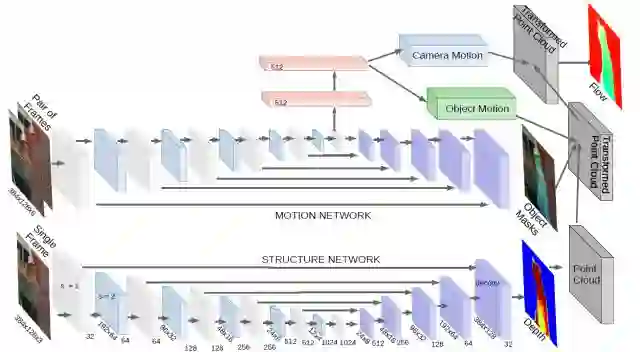
图2 SfM-Net的架构图
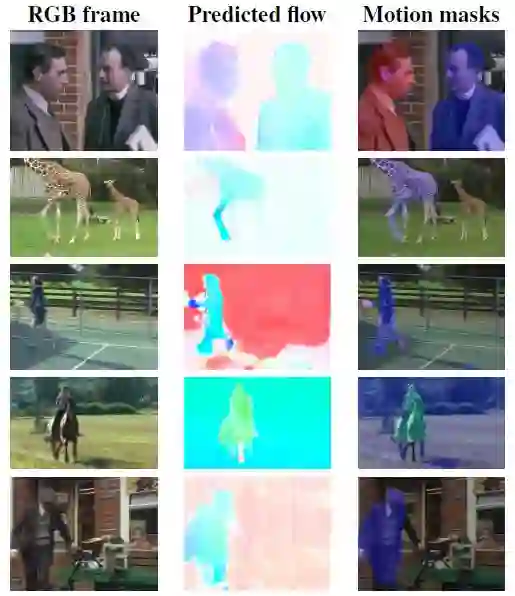
图3 SfM-Net无监督方式的运动分割结果
此外,SfM-Net能够提取有意义的深度估计,并且成功地估计帧与帧之间相机的旋转和平移。而且即便从未提供这种监督训练,SfM-Net也经常能够成功地将场景中的运动物体分割出来。
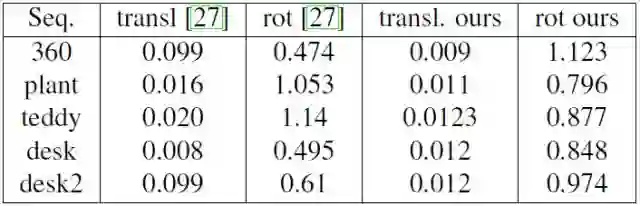
图4 不同数据集下相机运动估计结果对比
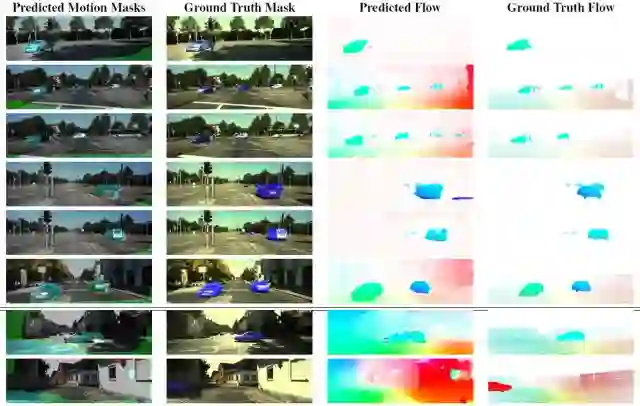
图5 SfM-Net无监督方式的物体分割和光流效果图

Abstract
We propose SfM-Net, a geometry-aware neural network for motion estimation in videos that decomposes frame-to-frame pixel motion in terms of scene and object depth, camera motion and 3D object rotations and translations. Given a sequence of frames, SfM-Net predicts depth, segmentation, camera and rigid object motions, converts those into a dense frame-to-frame motion field (optical flow), differentiably warps frames in time to match pixels and back-propagates. The model can be trained with various degrees of supervision: 1) self-supervised by the reprojection photometric error (completely unsupervised), 2) supervised by ego-motion (camera motion), or 3) supervised by depth (e.g., as provided by RGBD sensors). SfM-Net extracts meaningful depth estimates and successfully estimates frame-to-frame camera rotations and translations. It often successfully segments the moving objects in the scene, even though such supervision is never provided.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com

