从锚点到关键点,最新的目标检测方法发展到哪了
选自arXiv
从经典的 R-CNN 到今年非常受关注的 CenterNet,目标检测近几年到底有哪些发展?现在都到 2019 年了,基于关键点检测这一新范式效果到底怎么样?对于目标检测,这篇 40 页的综述论文有你想要的所有答案。
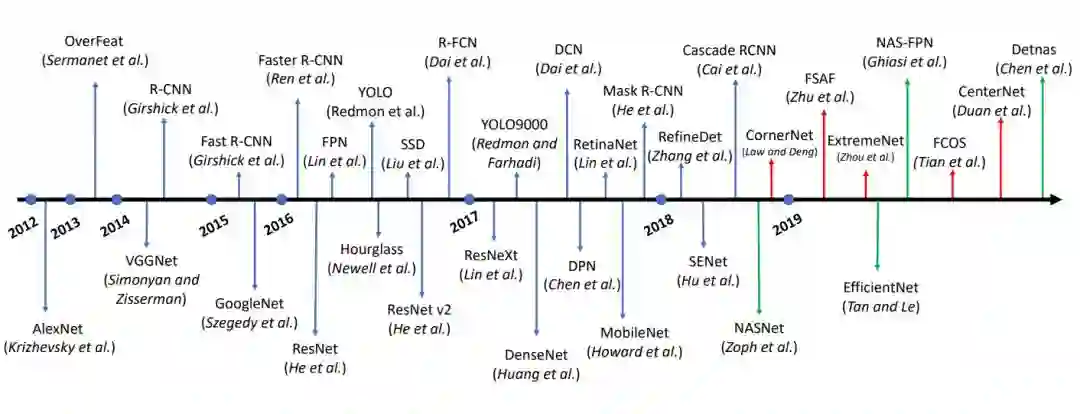
从经典走向前沿的目标检测
DL 时代的目标检测
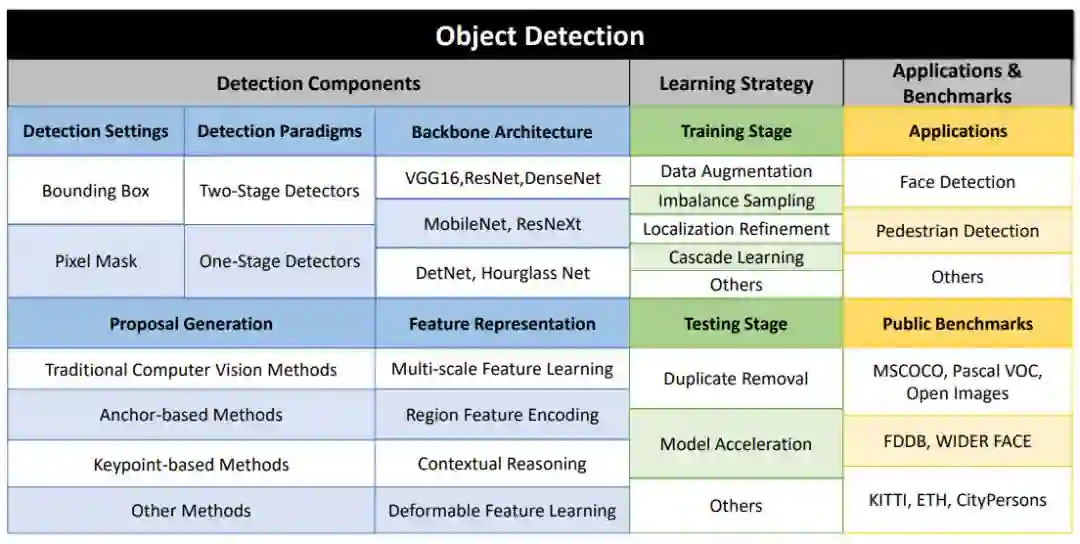
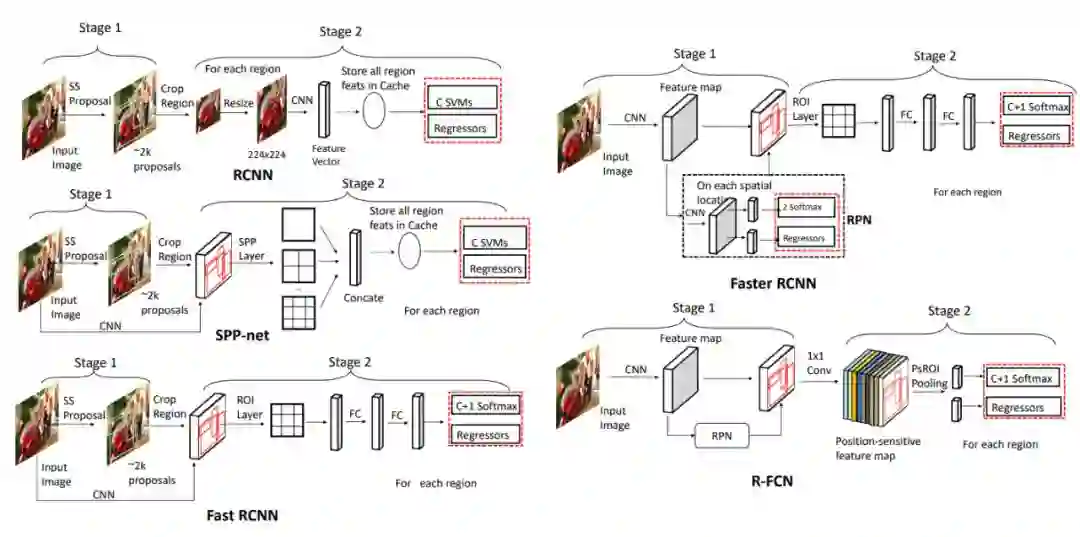
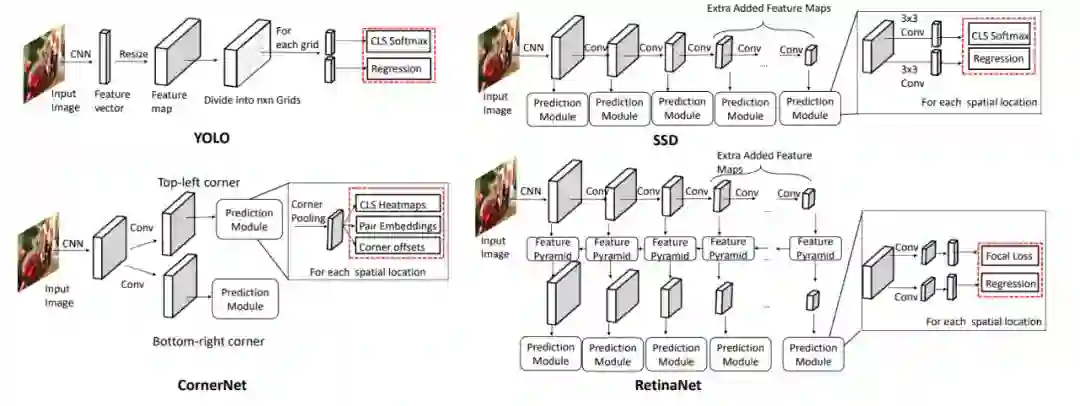
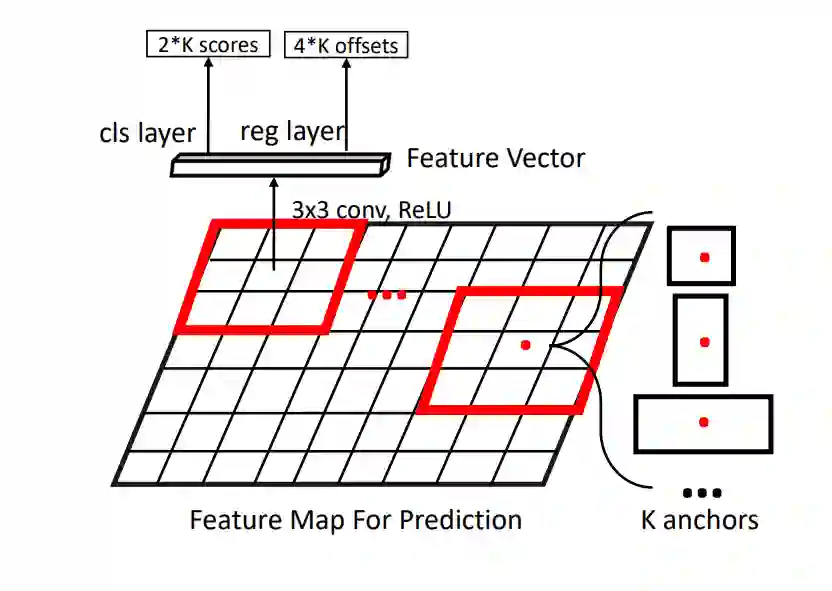
图 6:RPN 图示。
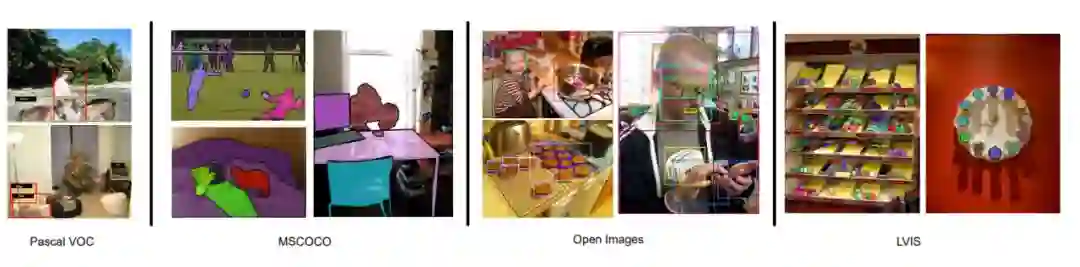
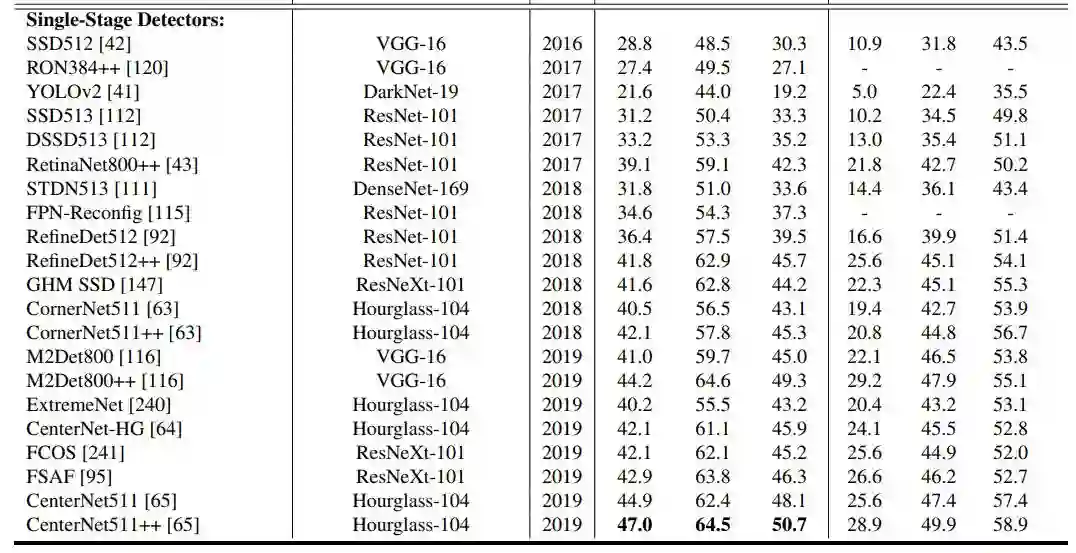
目标检测公开基准

WAIC 2019 开发者日将于 8 月 31 日在上海世博中心举办,包含 1 个主单元、4 个分单元、黑客马拉松比赛和开发者诊所互动区。
届时,全球顶尖 AI 专家、技术大牛、知名企业代表以及数千名开发者将齐聚上海,围绕人工智能前沿理论技术和开发实践进行分享与解读。
点击阅读原文,立即报名。
登录查看更多
相关内容

专知会员服务
85+阅读 · 2019年11月15日


相关VIP内容
专知会员服务
85+阅读 · 2019年11月15日
相关资讯
相关论文