厨师工作服/工作帽识别冠军方案|PRCV2022

极市导读
PRCV2022厨师工作服/工作帽识别的冠军方案解读,作者展示了其模型思路全过程。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
任务介绍:随着食品安全问题的日益严峻,后厨的卫生也成为了当下人们关心的问题。后厨人员的卫生穿戴习惯直接影响到食品的卫生品质,因此规范后厨穿着逐渐成为后厨人员卫生管理重要一环。算法应用场景:厨房监控摄像头取像,识别厨房人员的穿着情况,识别到厨房人员没有识别对象,进行告警。

数据集:

训练集:17725个 测试集:7776个 目标类别数目:31类
本赛题采用的评审指标如下:
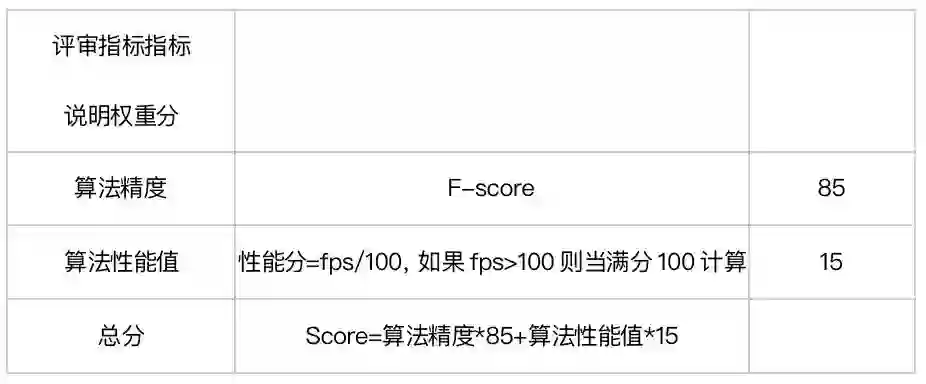
注意:
1.PRCV赛题中对厨师工作服/工作帽识别模型榜,有一个最低分数要求,成绩分需达到0.9
2.本赛题最终得分采取准确率、算法性能绝对值综合得分的形式,其中IoU使用0.4
解决方案:
算法选择:
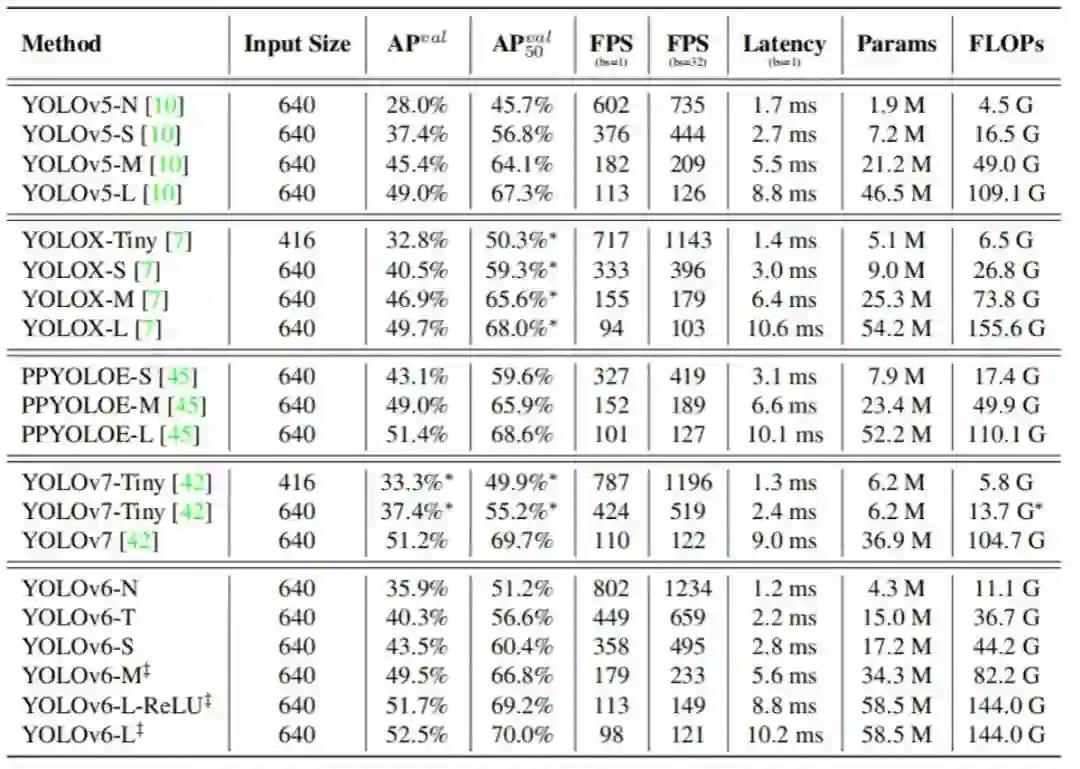
上图为yolov6文章中的几个yolo算法的性能指标比对,yolov6主要基于repvgg结构进行改进,以及采用anchorfree方式,笔者最开始使用的是yolov5m模型进行训练,速度可以达到100fps,但是调整训练和测试参数都无法达到赛题中要求的0.9的基准值,还是模型精度不够好,对比看yolov5-m和yolov6-m的性能指标,几乎同样的推演延时情况下,yolov6-m的mAP值比yolov5-L的精度还要高,因此笔者最终采用的是yolov6-m进行训练。
模型训练:
yolov6在代码结构上数据集上以及训练方法上有很多都和yolov5很类似。
数据集的生成:
由于笔者最开始使用的是yolov5进行训练测试的,yolov6的数据生成都是和之前yolov5一样的,参考了https://cvmart.net/document其中《基于YOLOV5的新手任务实践》中的步骤,训练集和测试集的比例采用的是9:1的比例。
数据配置文件如下:
train: /project/train/src_repo/dataset/images/train
val: /project/train/src_repo/dataset/images/val
nc: 31 # number of classes
names: ["person", "short_sleeve_red", "short_sleeve_black", "short_sleeve_white", "short_sleeve_grey", "short_sleeve_green",
"short_sleeve_blue", "short_sleeve_dark_blue", "long_sleeve_red", "long_sleeve_black", "long_sleeve_white", "long_sleeve_grey",
"non_uniform", "other_uniform", "chef_hat_red", "chef_hat_black", "chef_hat_white", "peaked_cap_red", "peaked_cap_black", "peaked_cap_white", "peaked_cap_blue",
"peaked_cap_beige", "disposable_cap_white", "disposable_cap_blue", "head", "other_hat", "apron_red", "apron_black", "apron_white", "apron_grey", "other_apron"] # class names
模型配置文件如下:
YOLOv6m model
model = dict(
type='YOLOv6m',
pretrained='yolov6m.pt',
depth_multiple=0.60,
width_multiple=0.75,
backbone=dict(
type='CSPBepBackbone',
num_repeats=[1, 6, 12, 18, 6],
out_channels=[64, 128, 256, 512, 1024],
csp_e=float(2)/3,
),
neck=dict(
type='CSPRepPANNeck',
num_repeats=[12, 12, 12, 12],
out_channels=[256, 128, 128, 256, 256, 512],
csp_e=float(2)/3,
),
head=dict(
type='EffiDeHead',
in_channels=[128, 256, 512],
num_layers=3,
begin_indices=24,
anchors=1,
out_indices=[17, 20, 23],
strides=[8, 16, 32],
iou_type='giou',
use_dfl=True,
reg_max=16, #if use_dfl is False, please set reg_max to 0
distill_weight={
'class': 1.0,
'dfl': 1.0,
},
)
)
solver=dict(
optim='SGD',
lr_scheduler='Cosine',
lr0=0.01,
lrf=0.01,
momentum=0.937,
weight_decay=0.0005,
warmup_epochs=3.0,
warmup_momentum=0.8,
warmup_bias_lr=0.1
)
data_aug = dict(
hsv_h=0.015,
hsv_s=0.7,
hsv_v=0.4,
degrees=0.0,
translate=0.1,
scale=0.9,
shear=0.0,
flipud=0.0,
fliplr=0.5,
mosaic=1.0,
mixup=0.1,
)
训练代码修改:
由于yolov6训练的模型太大,平台上最多只能存1G的模型,在代码engine.py中将self.tblogger = None 以及tblogger相关的屏蔽掉防止其占用太多的空间。
笔者采用yolov6训练的时候到截止提交时间没剩几天,将最大epochs改为了200,这里有可能使用默认的400效果更好。训练命令如下:
python /project/train/src_repo/YOLOv6/tools/train.py
--data /project/train/src_repo/yolov5/data/object.yaml
--img 640
--conf configs/yolov6m.py
--epochs 200
--output-dir /project/train/models/train \
--batch 16
推理测试:
推理代码主要基于的是极市封装程序的代码https://github.com/ExtremeMart/ev_sdk_demo4.0_pedestrian_intrusion_yolov5
为了方便进行测试,这里在cpp代码中增加python代码用于方便导出onnx模型
std::system("cd /project/train/src_repo/YOLOv6 && python /project/train/src_repo/YOLOv6/deploy/ONNX/export_onnx.py --weights /project/train/models/train/exp/weights/best_ckpt.pt --simplify --inplace --img-size 640 640"),笔者使用这种方法在测试代码中直接导出onnx,后面的部分ev_sdk中包含使用onnx转换为tensorrt的代码。前面的测评标准中有写到使用IOU 0.4,因此在后处理做非极大抑制的时候将阈值改成了0.4,这个地方多次测试对比会对结果有影响。
推理效果:

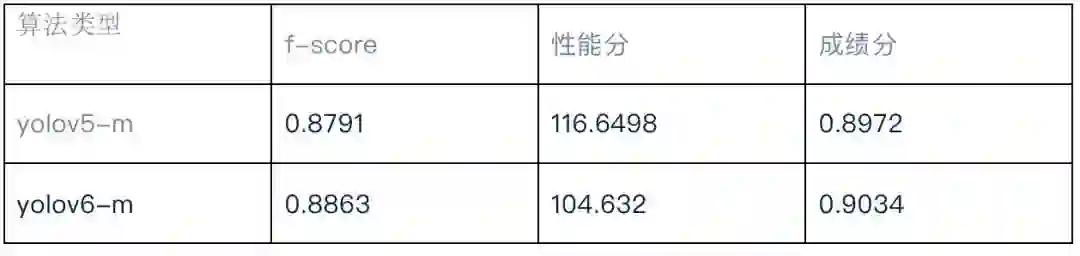
测试结果:
总结:
1.基于yolov6-m进行训练,在同样推理速度的情况下比yolov5-m的精度要好,这里模型的选择很重要。
2.注意测评标准中有提到IOU是用的是0.4,因此我们在推演的时候也使用的是0.4的IOU进行测试,这里对精度也有影响。
3.基于tensorrt fp16进行推演,同时为了要满足推演速度,需要调整合适的尺寸满足这个条件。
https://github.com/ultralytics/yolov5
https://github.com/meituan/YOLOv6
https://github.com/ExtremeMart/ev_sdk_demo4.0_pedestrian_intrusion_yolov5
公众号后台回复“直播”获取极市直播系列PPT下载~

# CV技术社群邀请函 #

备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
极市&深大CV技术交流群已创建,欢迎深大校友加入,在群内自由交流学术心得,分享学术讯息,共建良好的技术交流氛围。
“
点击阅读原文进入CV社区
收获更多技术干货