【泡泡点云时空】GemSketch:图像引导的交互式点云几何提取(ICRA2018-5)
泡泡点云时空,带你精读点云领域顶级会议文章
标题:GemSketch: Interactive Image-Guided Geometry Extraction from Point Clouds
作者:Mehran Maghoumi, Joseph J. LaViola Jr., Karthik Desingh and Odest Chadwicke Jenkins
来源:ICRA,2018
播音员:Crystal
编译:赵木木
审核:郑森华
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

我们引入一个交互式系统,用于从单个或多视图的点云中提取广义圆柱体和长方体的几何图形,我们提出的方法是直观的,只需要用户跟踪对象的轮廓。利用用户对对象的感知理解,我们提出的方法能够提取出精确的模型,即使在存在遮挡、混乱或不完整的点云数据的情况下,也能保留原始对象的细节和规模。我们通过在公共RGBD数据集上的一系列实验来证明我们所提议的方法的优点。我们使用每个对象的最多两个视图,从数据集中提取了16个对象。提取的模型与原始对象具有高度的视觉相似性。此外,在比较我们提取的模型和数据集的地面真实数据时,我们实现了均值归一化的豪斯多夫距离为5.66%。
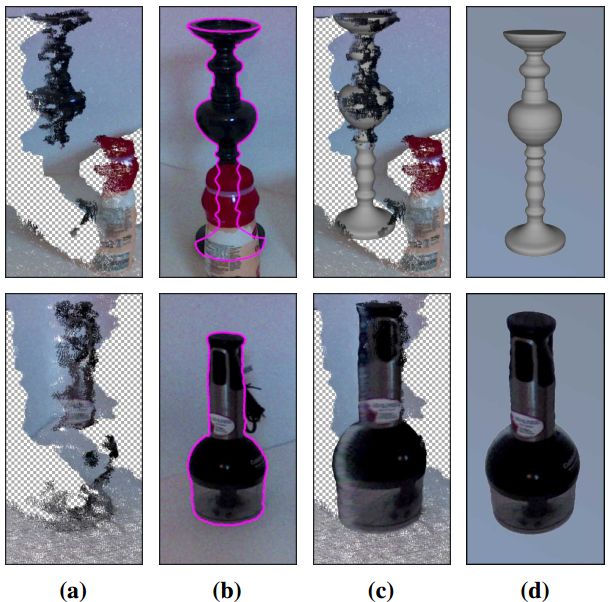
图1:使用GemSketch对遮挡烛台(第一行)和透明研磨机(第二行)进行几何提取。(a)侧向单视点云数据;(b)RGB图像上的用户追踪轮廓(用户可以使用他们直观的判断来跟踪被遮挡的对象部分);(c)叠加在点云上的3D网格;(d)完全提取大规模纹理映射的3D模型。(d)中的研磨机是纹理映射的,方格图案表示缺少点云数据。请注意,在最终结果中,由于平滑,预计会出现与用户输入的小偏差。
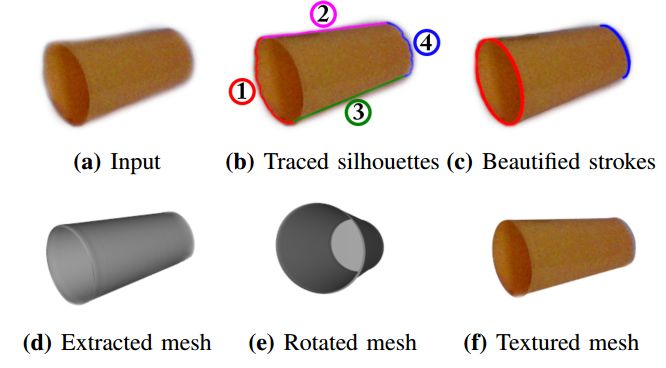
图2:跟踪杯子的轮廓来提取它的3D网格,用户可以将网格指定为空心
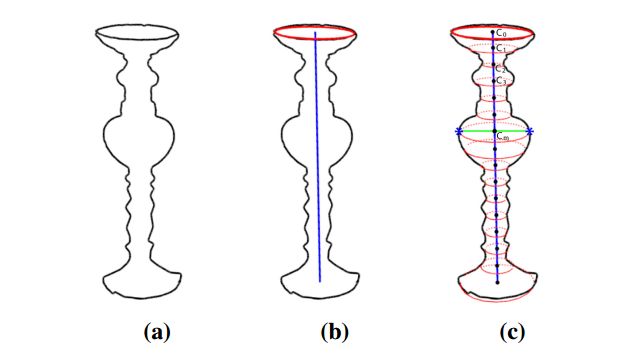
图3:建模广义圆柱体。(a)用户追踪的轮廓;(b)中提取物体的轮廓和中心线;(c)沿着物体中心线按一定的时间间隔传播和按比例调整轮廓。每个Ci表示沿着中心线的复制剖面的中心。复制的轮廓按照比例缩放,这样它们就可以在星号表示的点上贴合用户的笔画
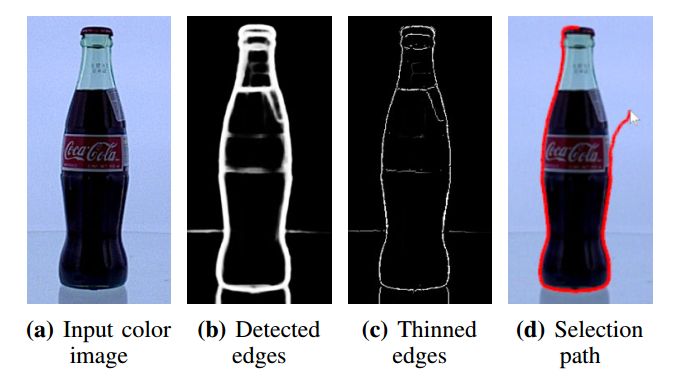
图4:在磁性选择工具所必需的RGB图像上执行的预处理步骤,在(b)中显示输入图像(a)的边缘的检测结果,并且变薄以
产生(c)中的边
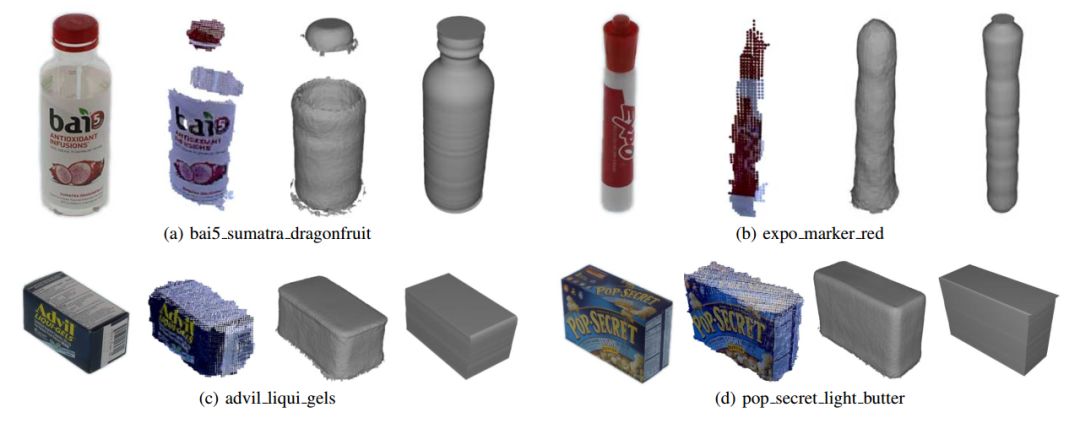
图5:从BigBIRD数据集中提取的样本对象。在每个物体组中,第一列是目标物体的RGB图像。第二列是对象的原始点云。第三列是由BigBIRD数据集提供的地面真值网格。第四列是使用我们的系统建模的对象。请参阅附带的视频和补充材料,以获得我们完整提取的数据。

Abstract
We introduce an interactive system for extracting the geometries of generalized cylinders and cuboids from singleor multiple-view point clouds. Our proposed method is intuitive and only requires the object's silhouettes to be traced by the user.Leveraging the user's perceptual understanding of what an object looks like, our proposed method is capable of extracting accurate models, even in the presence of occlusion, clutter or incomplete point cloud data, while preserving the original object's details and scale. We demonstrate the merits of our proposed method through a set of experiments on a public RGBD dataset. We extracted 16 objects from the dataset using at most two views of each object. Our extracted models represent a high degree of visual similarity to the original objects. Further, we achieved a mean normalized Hausdorff distance of 5.66% when comparing our extracted models with the dataset's ground truths.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以点击阅读原文获得链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com