【泡泡点云时空】SegMap: 使用数据驱动描述子进行3D点云分割建图(RSS2018-1)
泡泡点云时空,带你精读点云领域顶级会议文章
标题:SegMap: 3D Segment Mapping using Data-Driven Descriptors
作者:Renaud Dube, Andrei Cramariuc, Daniel Dugas, Juan Nieto, Roland Siegwart, and Cesar Cadena
来源:Robotic:Science and Systems 2018
播音员:杨柳
编译:黄玉玺
审核:郑森华,吕佳俊
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

当对环境进行定位与建图时,在结构层面上处理会更有利于增强系统对环境以及光照变化的鲁棒性。本文提出了一种地图表示方法:SegMap,一种基于3D点云分割的定位与建图方法。除了便于处理计算量较大的3D点云之外,本方法在分割(segments)的层面上进行数据处理,这解决了单机器人与多机器人系统的实时数据压缩问题。当前的一些方法所提取的特征描述子仅仅是用于定位,但是SegMap为了提取有意义的特征信息利用了数据驱动的描述子,因此SegMap提取的描述子也可以用于重建稠密的3D点云地图以及提取语义信息。这对于执行导航任务以及需要可视化反馈的终端用户(如机器人操作手)来说很有意义,可以用于搜索以及救援场景。这些能力在多城市驾驶以及搜索救援实验中得到了验证。我们的方法使ROC曲线下的面积增加了28.3%,超过了目前基于特征值提取特征的方法。我们还获得了与专门为重建任务训练的模型非常相似的重建能力。SegMap算法已经开源,并且有易于运行的演示,网址为www.github.com/ethz-asl/segmap。
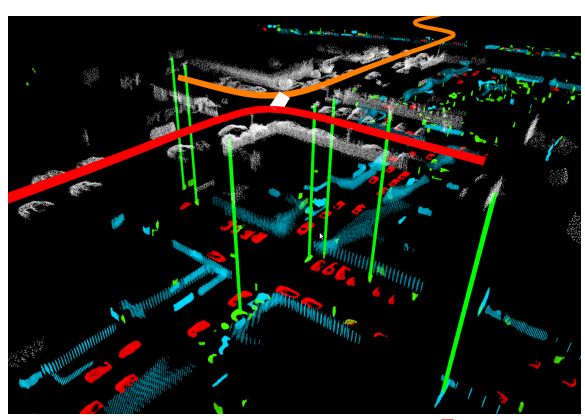
图1:Segmap方法示意图。图中的红色轨迹与橘色轨迹分别代表两台机器人从不同的方向驶向交叉路口。白色表示的是使用我们提出的数据驱动的描述子在机器人附近提取的分割段(segments)。提取的分割与目标分割会进行匹配,匹配成功的由绿色的垂直线表示。目标分割的点云在下方表示,不同的颜色代表不同的语义信息(红色代表车,浅蓝色代表建筑物,绿色代表其它)。我们利用这些语义信息增强定位对环境变化的鲁棒性,比如只利用地图中静态的物体来定位。demo视频可见:https://youtu.be/CMk4w4eRobg
算法概述
Segmap算法包含五个主要模块:
1.分割模块(Segmentation)。该模块的主要思想是将3D激光雷达采集到的点云累计投影到一个动态的体素网格内,然后使用区域增长的方法对网格内的点云进行分割,并且为了提高效率,只使用当前正在发生变化的网格作为种子进行区域增长。
2.描述模块(Description)。使用数据驱动的描述子提取3D分割的压缩特征,具体流程见图2。
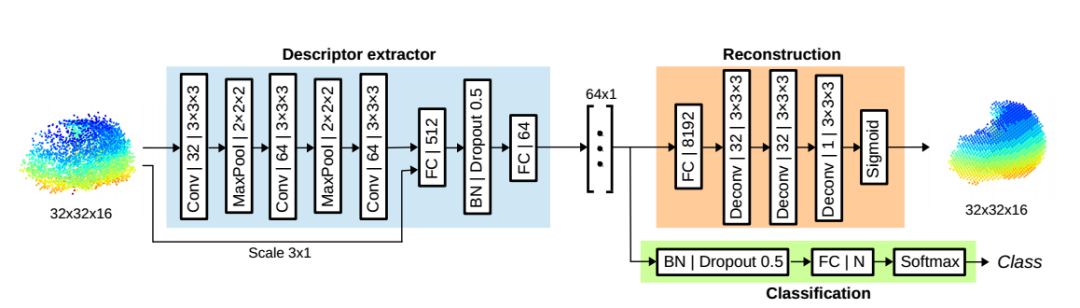
图2:描述子提取算法示意图。描述子提取器由三个卷积层和两个全连接层组成。3D的分割被压缩成一个64*1维的描述子,该描述子可以用来定位、地图重构以及语义提取。右侧所示的是用于训练的分类和重建层。图中,Conv表示卷积,Deconv表示反卷积,FC表示全连接,BN表示批量标准化。Conv与Deconv层的参数有滤波器的数量及其大小,FC层的参数有节点数目,最大池层具有操作池的大小,丢失层具有丢弃值的比率。除非另有说明,否则ReLU激活功能用于所有层。
3.定位模块(Localization)。使用K近邻算法选取候选匹配对,使用几何一致性算法确定用于计算位姿的匹配关系。
4-5.地图重构与语义提取模块(Reconstruction & Semantics)。地图的重构以及语义的提取均可以由2所述的描述子生成,也正是因为该描述子的紧凑性,可以将此描述子广播至网络,在该网络上的任意一台机器人均可以利用其进行地图重构与语义提取。

Abstract
When performing localization and mapping, working at the level of structure can be advantageous in terms of robustness to environmental changes and differences in illumination. This paper presents SegMap: a map representation solution to the localization and mapping problem based on the extraction of segments in 3D point clouds. In addition to facilitating the computationally intensive task of processing 3D point clouds, working at the level of segments addresses the data compression requirements of real-time single- and multi-robot systems. While current methods extract descriptors for the single task of localization, SegMap leverages a data-driven descriptor in order to extract meaningful features that can also be used for reconstructing a dense 3D map of the environment and for extracting semantic information. This is particularly interesting for navigation tasks and for providing visual feedback to endusers such as robot operators, for example in search and rescue scenarios. These capabilities are demonstrated in multiple urban driving and search and rescue experiments. Our method leads to an increase of area under the ROC curve of 28.3% over current state of the art using eigenvalue based features. We also obtain very similar reconstruction capabilities to a model specifically trained for this task. The SegMap implementation is available open-source along with easy to run demonstrations at www.github.com/ethz-asl/segmap.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




