【泡泡一分钟】通过对未修剪视频的可靠镜头识别来进行复杂事件的检测(ICCV2017-71)
每天一分钟,带你读遍机器人顶级会议文章
标题:Complex Event Detection by Identifying Reliable Shots from Untrimmed Videos
作者:Hehe Fan, Xiaojun Chang, De Cheng, Yi Yang, Dong Xu and Alexander G. Hauptmann
来源:International Conference on Computer Vision (ICCV 2017)
播音员:水蘸墨
编译:Fei 周平(77)
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

复杂事件检测的目标是自动检测一个事件是否发生在临时未修剪的长视频中,这些视频通常由多个视频镜头组成。记正面的(负面的)视频中观察一些视频镜头与给定的事件类无关(相关),我们将每个视频作为一个包,并将视频中的视频镜头作为实例,将此任务作为多实例学习(MIL)问题来制定。
为此,我们提出了一种新的MIL方法,它同时学习线性SVM分类器,并推导出每个实例的二元归类,以便从每个正或负包中选择可靠的训练实例。在我们新的目标函数中,我们平衡了加权训练误差和l1-l2混合范数正则化条件,从而可以自适应地从不同视频选择可靠的镜头作为训练实例,使他们尽可能多样。我们还开发了一种能有效解决我们所提出目标函数的交替化方法。
通过将我们的方法应用于真实世界的多媒体事件检测(MED)数据集,包括MEDTest-14, MEDTest-13和CCV,这些具有挑战性的实验显示了复杂事件检测MIL方法的有效性。

本文提出的方法是通过选择可靠的实例进行多实例学习,英文为Multi-instance learning by selecting reliable instances ,简称为MIL-SRI。
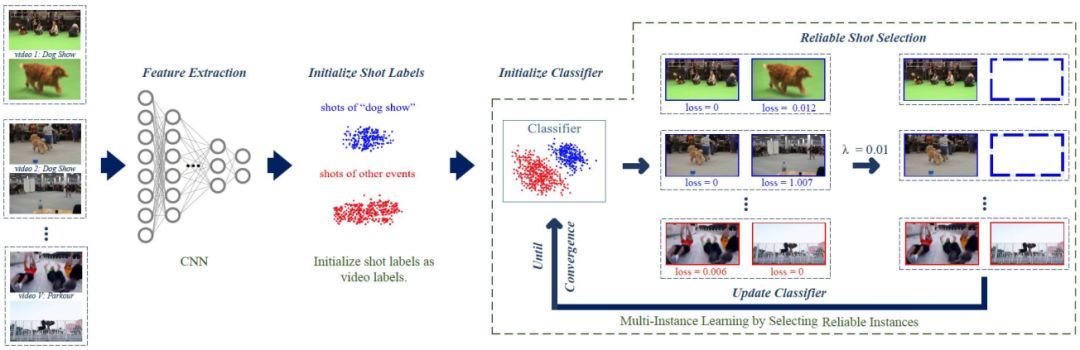
图1 MIL-SRI方法的框架图(将本文提出的MIL-SRI方法应用于“狗狗表演”事件检测的训练过程)
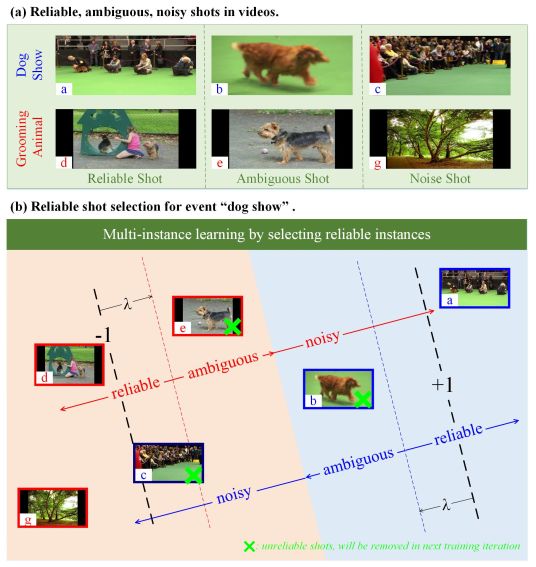
图2 模型中实例的三种分类以及“‘狗狗表演”事件中MIL-SRI方法的主要原理
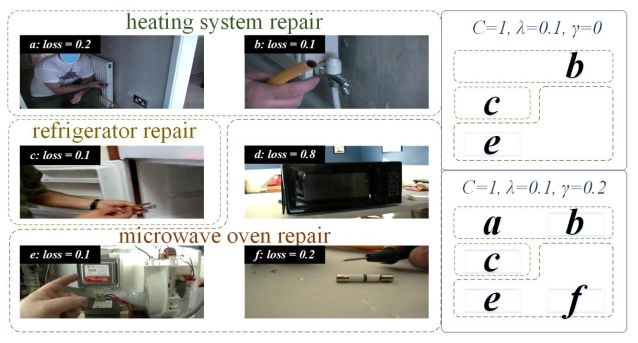
图3 l2范数正则化有利于可靠镜头的选取
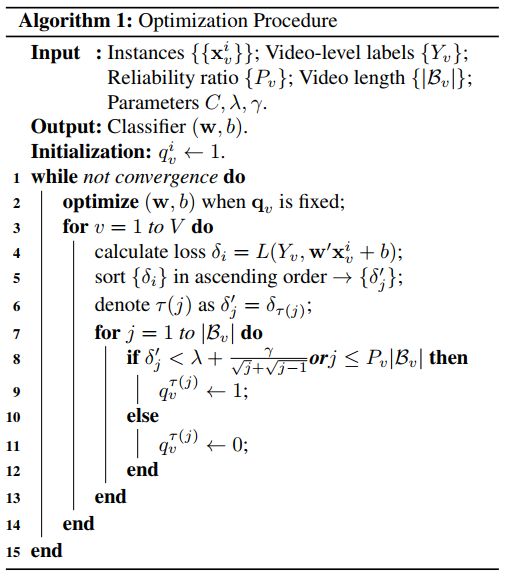
图4 MIL-SRI的优化算法
Abstract
The goal of complex event detection is to automatically detect whether an event of interest happens in temporally untrimmed long videos which usually consist of multiple video shots. Observing some video shots in positive (resp. negative) videos are irrelevant (resp. relevant) to the given event class, we formulate this task as a multi-instance learning (MIL) problem by taking each video as a bag and the video shots in each video as instances. To this end, we propose a new MIL method, which simultaneously learns a linear SVM classifier and infers a binary indicator for each instance in order to select reliable training instances from each positive or negative bag. In our new objective function, we balance the weighted training errors and a l1-l2 mixed-norm regularization term which adaptively selects reliable shots as training instances from different videos to have them as diverse as possible. We also develop an alternating optimization approach that can efficiently solve our proposed objective function. Extensive experiments on the challenging real-world Multimedia Event Detection (MED) datasets MEDTest-14, MEDTest-13 and CCV clearly demonstrate the effectiveness of our proposed MIL approach for complex event detection.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


