MIT这款救灾机器人竟靠人体反射保持平衡,还天生神力能空手劈木板
导读
从2011年,福岛核泄漏事件发生后,核电站内高水平的辐射阻止了工人进行紧急处理措施,也使得核电站的清理工作一直未能顺利开展。然而,令人类头疼苦恼的辐射,对机器人来说却不在话下,这也促成了对于救灾机器人的研发以及实际应用,今天要介绍的这款HERMES机器人也在此列。
作者:溪岚
在救灾场景中,可能会发生许多不可预测的情况,比如遇到从未见过的门把手,面前落下一块挡路的石块,或者某条路塌方堵塞难以通行等等。在这些情况发生时,人类可能会迅速做出判断,做出合适的选择,而机器人却很难在未经训练的情况下应对类似场景。
人类拥有机器人所不具备的灵活性和决断性,而机器人又拥有人类没有的巨大力量和坚硬身躯,怎样才能够将二者的优点相结合呢?
答案就是遥操作。
BFI遥操作系统
遥操作并不是一个新鲜的名词,长期以来,遥操作机器人一直被应用在工业、航空航天和水下环境中,丰田的THR-3机器人也运用了这一技术。而MIT仿生机器人实验室(Biomimetic Robotics Lab)的研究团队就将这套技术系统应用在了自己的救灾机器人——HERMES身上。
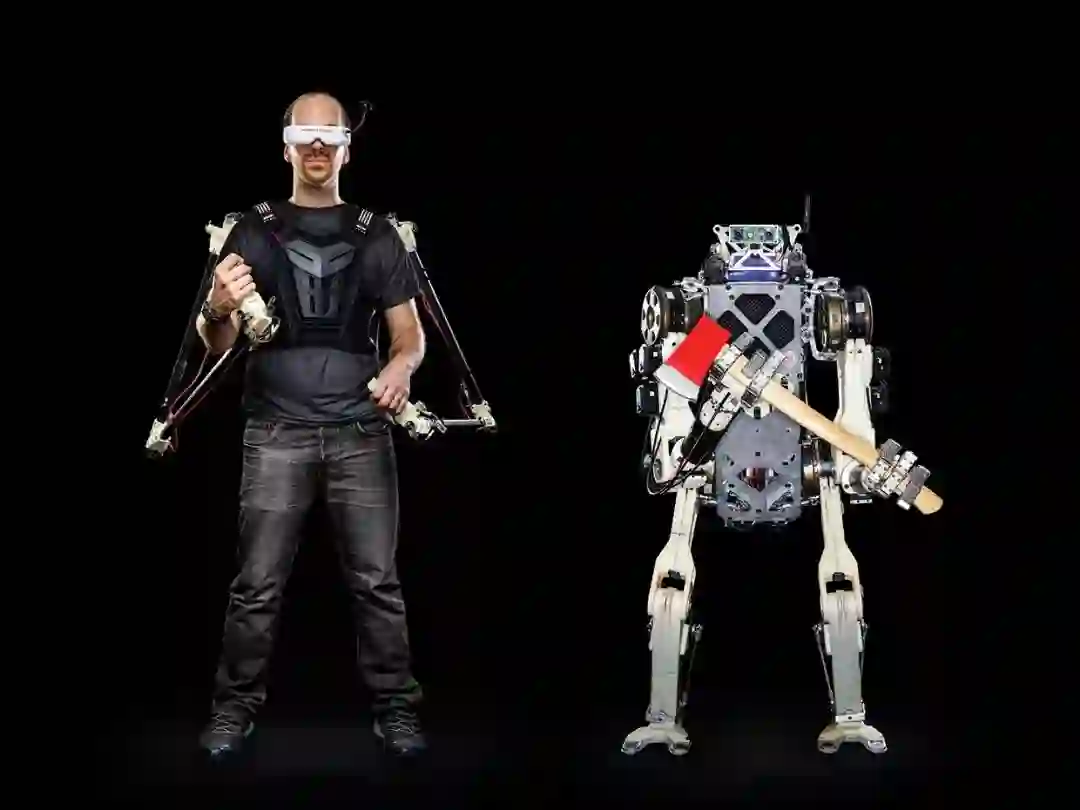
在团队的重新构建下,将HERMES所应用的遥操作系统分成了两部分:一部分是能够灵活动作的仿人机器人;另一部分是一种新型的双向人机系统,实现了操作者和机器人的动作相互传送,不仅机器人能够被人类的动作所遥控,人类也能够感受到机器人做出动作后重心、平衡性等产生的变化。
这就意味着,当机器人平衡被打破时,操作者也会感觉身体失衡,同时,人类身体产生的自然反射能够帮助操作者本能地做出动作以保持平衡,而机器人接收到这种反应也会做出同样的动作,避免摔倒。

HERMES遥操作系统的独特之处在于,机器人的稳定性主要依赖于操作者的身体反应,而非像其他遥操作机器人一样,仅依靠自身稳定性保持平衡,这套操作系统被团队命名为BFI(平衡反馈)系统。
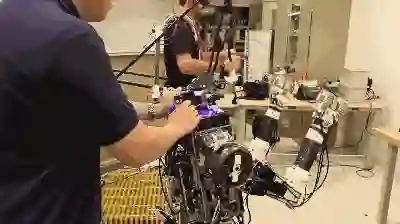
操纵BFI系统时,操作者需要站在一个边长约90cm的正方形平台上,台中内置了测压元件,通过测量平台表面所受的压力可以得知操作者脚部用力的位置。
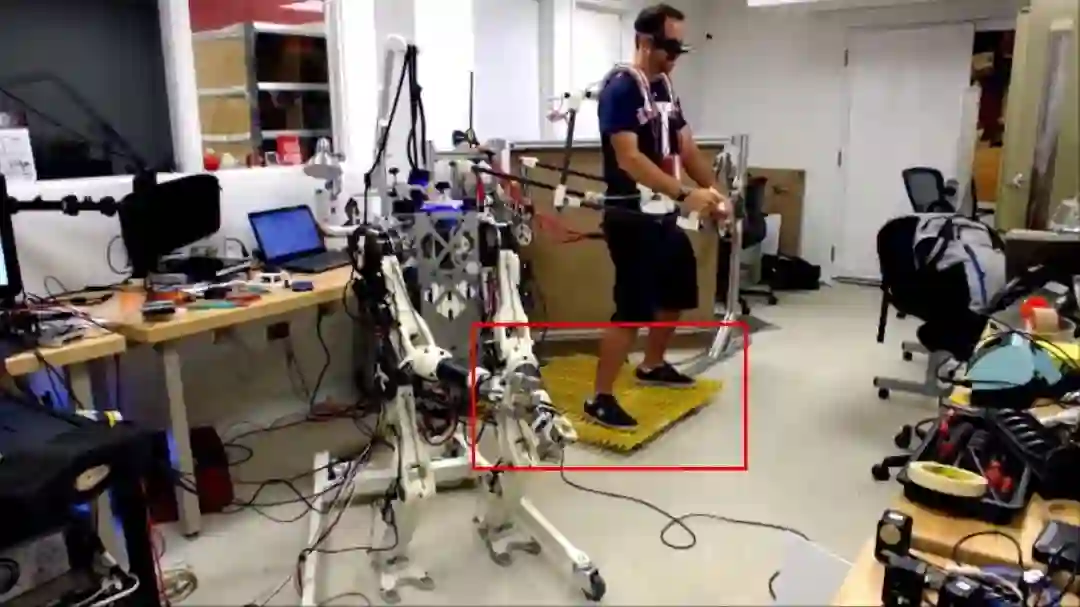
联动装置卡在操作者的肩部和腰部,能够准确测量不到1cm的位移,操作者手中握着的两根操作杆能够控制HERMES手臂的移动以及手指张合。
并且联动装置内安装了马达,在机器人受力时能够反馈给操作者高达80牛顿的力量,足以推动操作者的身体。当研究人员用力摇晃HERMES的身躯,或用锤子轻轻敲击的时候,操作者的身体也会出现类似的摇晃。
HERMES机器人和BFI系统分别由两台计算机控制,计算机在运行自己的控制回路的同时,会收集自己的姿态数据与对方进行比较,并发送给对方以便进行调整。比如BFI的控制计算机会将操作者的重心变化以及手脚的相对位置发送给另一台计算机,HERMES的计算机再将这些数值变成机器人的比例进行复现。这个循环每秒可重复一千次,使得二者的动作能够基本上同步。
救灾机器人HERMES
与能钻进窄小缝隙的机器蛇、能勘测灾区地图的无人机等不同,HERMES是一款重型操纵机器人,能够执行敲碎混凝土款、用斧子劈开门板等命令。尽管如此,它的重量却只有45kg,身形是普通人的90%,外壳坚固又耐用。
第一次测试时,HERMES还只有双腿,就能够将面前的垃圾桶踢飞了。在其后几年的一次次改进中,HERMES不仅拥有了身躯,还拥有了手臂,研究人员对其的测试范围也就越来越广。
比如手握斧子,向前劈砍↓

空手断木板↓
用灭火器灭火↓

以及手握电钻,捏易拉罐,打穿混凝土块等↓
(温馨提示:以上危险动作均在专业人士看管下完成,请勿轻易模仿)
在一次次实验中,研究人员发现,HERMES对于许多实验来说都显得身形过大,移动起来耗时耗力不说,还需要为它的实验准备许多安全措施(毕竟它是个擅用斧子和电钻的家伙)。如果想要实验更加灵活的运动,可能还是需要一个小一点的机器人才能完成。于是,研究团队就做出了Little HERMES,一个缩水版的HREMES。
缩水版HERMES:LittleHERMES
为什么说Little HERMES是HERMES的缩水版呢?
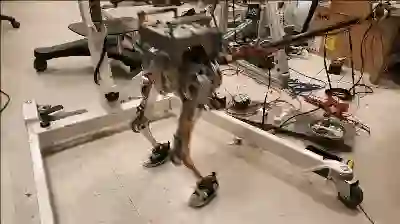
为了使Little HERMES拥有更紧凑的设计结构,研究人员将它的自由度从每条腿6个减少到了每条腿3个,脚部也从双趾替换成了简易橡胶球,每个橡胶球中装有一个三轴力传感器。

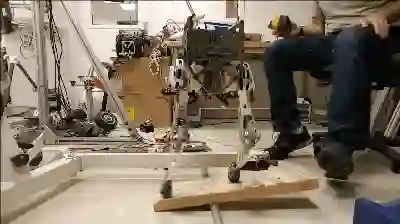
这个缩水版的小家伙拥有无与伦比的平衡性,虽然仍未开发完善,但是当研究人员将它放在一块滚动的木板上时,它摇摇晃晃地站在上面,竟然一直没有摔倒。
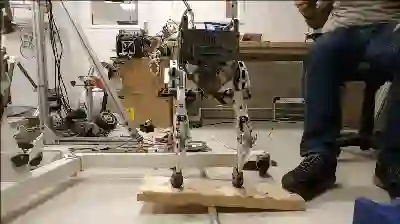
当木板以大幅度快速晃动时,Little HERMES紧着倒腾了几步,几度单腿腾空,最终依然保持了平衡。
有意为之的娇小体型仍然为研究带来了一定的不便。BFI最初是为接近人类体型的机器人所设计的,套用到Little HERMES上时便使其动作变得生涩起来。因此,研究人员为其建立了一个新的数学模型,可以追踪地面接触力、操纵者质心等参数。
现在,Little HERMES不但可以学操作员原地踏步,学人进行跳跃,甚至连动作快慢的变化都能够学习过来,相信不要多久,它就能够跟随着研究员去户外玩耍了。
待解决的问题
除了机器人体型大小不同会造成影响外,BFI系统对操作员的精神状态也可能造成一定影响。当操作员一心二用地边控制自己的身体动作,边以此指挥机器人时,就很容易会感到精神疲劳。尤其是在做类似于倒水这类精细的动作时,操作员连续做上三次就不得不停下来歇一歇了。

对于这类问题,研究团队认为仍需提高机器人的自主性能,让机器人与人类共同管理机器人的稳定性。尤其当人类在专注于让机器人做某件事时(操作员凝视某一处时被判断为专注于某事),便由自动控制系统接管机器人的身体平衡。
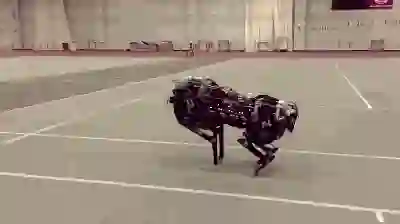
团队还希望将大多数的灵长动物作为HERMES的楷模,让其能够用四足快速移动并跳跃障碍,并用双足的直立形态执行命令、进行救灾工作。
而对于目前遥操控的网络延迟问题,团队则表示可能会考虑引进5G来降低延迟,以免机器人的行动与操作员的命令脱节。或许等解决了机器人自平衡性问题并引入5G之后,HERMES和Little HERMES的研究会有很大的进展。
END
加入社群
机器人大讲堂Rob社群开始招募啦!如果您正在从事或想要从事机器人行业、想要学习这一方向,都欢迎您加入我们共同探讨机器人前沿科技。
另外,腿足机器人、医疗机器人、工业机器人专业讨论群正在招募中,欢迎各位专业领域的小伙伴加入。
在机器人大讲堂公众号对话框回复“交流群”获取入群方式!
招募作者
机器人大讲堂正在招募兼职内容创作者和专栏作家
请将简历和原创作品投至邮箱:LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎有兴趣有能力的朋友加入!

看累了吗?戳一下“在看”支持我们吧!





