机器人学中的必要基础——状态估计
经过多年的发展,状态估计理论已经有了许多直接、重要的结果,比如卡尔曼滤波器、最小二乘优化、粒子滤波器等,这些结果在解决目标跟踪、定位、建图、轨迹融合等问题中占据着核心位置,并广泛应用于自动驾驶、机器人和无人机等领域。
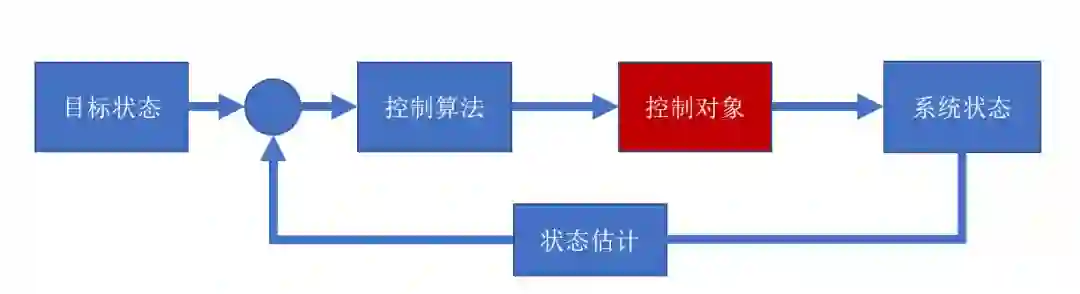
但是,传感器的精度是有限的,如何利用传感器信息,尽可能准确地估计一组完整描述机器人随时间运动的物理量,如位置、速度、加速度、角度、角速度等,是状态估计领域要解决的最主要问题。因此,稳定、准确的状态估计是机器人稳定控制的必要基础。
>>状态估计第一期学员课程感想<<
不理解状态估计,在学习SLAM、多传感器融合等领域的过程中,定会花费很长时间去研究相关算法:这些算法是什么?从哪里来?如何推导得到的?
为帮助伙伴们更高效学习,深蓝学院联合高翔博士,耗时7个月精心打磨,重磅推出『机器人学中的状态估计』在线课程。
本课程帮助大家梳理状态估计理论重点知识,总结公式背后表达的结论以及意义,将理论与应用结合,更透彻理解书中重点公式,更快、更好地搭建状态估计知识体系!

高翔
慕尼黑工业大学博士后
清华大学自动化系博士
长期从事SLAM的研究。主要包括机器人中的视觉SLAM技术、机器学习与SLAM结合,主编畅销书《视觉SLAM十四讲:从理论到实践》,《机器人学中的状态估计》译者之一。
对状态估计理论体系有全面深刻地理解。
-
理解线性高斯系统与非线性高斯系统上的各种滤波器:Rauch-Tung-Striebel Smoother、卡尔曼滤波器、拓展卡尔曼滤波器、Sigma-Point 卡尔曼滤波器、粒子滤波器等算法的传承过程与异同 -
对三维空间上的几何性质与李群李代数有系统的理解和实质的推导能力。 能够利用所学的状态估计知识解决现实当中的位姿优化、建图、轨迹融合等实际问题。
1.3 高斯概率密度函数
第2讲 线性高斯系统的状态估计问题
2.3 离散时间的滤波算法
第3讲 非线性高斯系统的状态估计问题
3.3 离散时间的批量估计
第4讲 偏差、匹配和外点
4.3 外点
第5讲 三维几何学基础
5.3 姿态
第6讲 矩阵李群
6.3 概率与统计
第7讲 位姿估计问题
7.2 点云跟踪
第8讲 位姿和点的估计问题
8.2 同时定位与地图构建
1. 社群答疑
班主任督促学习、助教及时批改作业并配合讲师微信群答疑,及时解惑,高效学习。
3. 作业迭代
提交作业,助教批改后,根据助教意见对作业进行迭代修改;没有最好,只有更好!
4. 定期班会
每期班会,助教对作业进行讲评和指导;在班会中,学习更多技巧;在交流中,收获更多思路。
抢占学习座位
别在犹豫中错失良机!
立刻扫码报名!
咨询报名的伙伴较多