【泡泡一分钟】基于模糊图像序列的摄像机位姿、深度、去模糊和超分辨率联合估计(ICCV2017-484)
每天一分钟,带你读遍机器人顶级会议文章
标题:Joint Estimation of Camera Pose, Depth, Deblurring, and Super-Resolution from a Blurred Image Sequence
作者:Haesol Park, Kyoung Mu Lee
来源:ICCV 2017 ( IEEE International Conference on Computer Vision)
编译:张建
审核:颜青松 陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

传统的从严重模糊或低分辨率图像估计相机位姿和场景结构的方法常常会失败。现成的去模糊或超分辨率方法可以显示视觉上令人愉悦的结果。然而,在匹配之前独立地应用每种技术通常是无益的,因为这一系列简单的过程忽略了图像之间的一致性。
本文提出了一个同时解决四个问题的统一框架,即稠密深度重建、相机位姿估计、超分辨率和去模糊。通过反射一个物理成像过程,我们提出了代价最小化问题,并使用交替优化技术求解。
对比了原始多视图立体方法的失败,在合成视频和真实视频上的实验结果展示了由严重退化的图像得到的高质量深度地图。
与独立应用或组合传统的视频去模糊、超分辨率方法不同,我们提出的方法还产生了出色的去模糊和超分辨率图像。
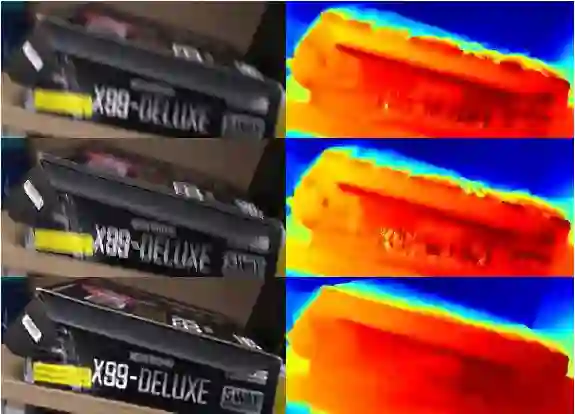
图1:模糊和低分辨率图像的深度估计和图像恢复结果的比较。左边的列是估计的潜像,而右边的列是它们对应的深度图。从上到下的图像分别为: (a)通过简单的双三次插值,(b)在应用超分辨率算法后去模糊的独立使用和(c)我们提出的方法。通过基线变分深度估计来估计前两行的深度图。
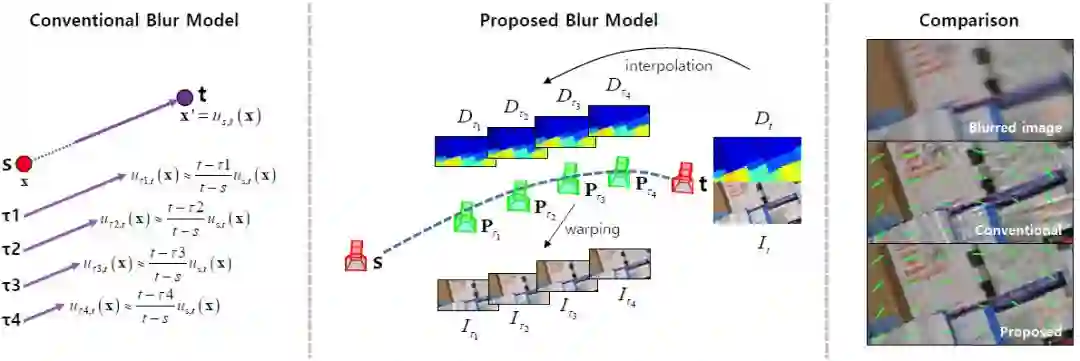
图2:所提出的模糊模型与传统模糊模型的比较。两个模型都说明了时间t上那一帧的模糊过程,其中s代表前一帧的时间。
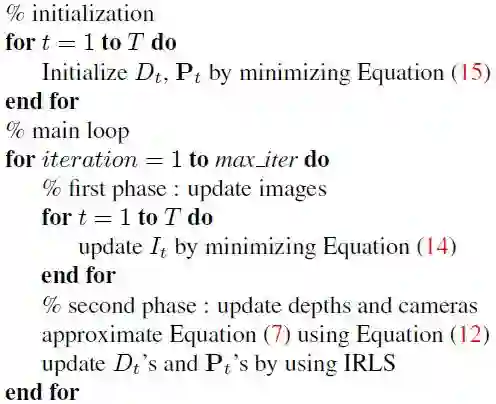
算法1 整体优化过程

Abstract
The conventional methods for estimating camera poses and scene structures from severely blurry or low resolution images often result in failure. The off-the-shelf deblurring or super-resolution methods may show visually pleasing results. However, applying each technique independently before matching is generally unprofitable because this na¨ıve series of procedures ignores the consistency between images. In this paper, we propose a pioneering unified framework that solves four problems simultaneously, namely, dense depth reconstruction, camera pose estimation, superresolution, and deblurring. By reflecting a physical imaging process, we formulate a cost minimization problem and solve it using an alternating optimization technique. The experimental results on both synthetic and real videos show high-quality depth maps derived from severely degraded images that contrast the failures of na¨ıve multi-view stereo methods. Our proposed method also produces outstanding deblurred and super-resolved images unlike the independent application or combination of conventional video deblurring, super-resolution methods.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com

