无人机任务分配综述
摘要:任务分配是无人机完成军事任务的重要保证,是任务规划的重要组成部分,一直是无人机作战系统的重要研究课题。首先介绍了无人机任务分配的基本概念,然后分别从集中式分配、分布式分配和分层次分布式分配等研究方法对无人机任务分配进行了综述,最后分析了无人机任务分配的关键技术以及未来的发展趋势,分别从异构多类型无人机的协同任务分配、不确定条件下的任务分配、静态博弈、动态博弈、动态实时任务分配、多要素综合任务分配等方面说明了还需要进一步研究与解决的关键问题。
关键词:任务分配;集中式;分布式;分层次分布式
无人机即由自己控制或者地面操作人员操控的无人驾驶飞机[1-2]。随着科学技术的不断发展,战场形势的日趋严峻,无人机在现代战争中的作战优势越发明显,所以得到越来越多国家军事高层的青睐。任务分配是根据既定的目标把需要完成的任务合理地分派给系统中的组员,达到高效率执行任务、优化无人机系统的目的[3]。
目前,学者们的研究重点是多架同构、异构无人机组成的无人机编队协同执行任务[4-12]。在编队中,每架无人机的性质、作用、有效载荷、作战能力等各方面都有差异,满足各种约束的条件下,最大效率地将全部作战任务合理分配给无人机编队,使系统的各种性能指标尽可能达到极值,发挥无人机编队协同工作效能,这是无人机编队作战系统的重要研究课题。文献[5]探索了对不同种类的目标进行侦察、打击和评估任务时异构无人机的协同任务分配问题。对于侦察与评估任务中所得到的信息量,运用信息论中熵的变化量对其进行度量,把无人机对不同类型目标的打击能力简化为对目标的毁伤概率,同时把每个任务之间的关联性考虑在内,建立了异构多无人机协同任务分配模型。文献[6]归纳和总结了多无人机协同任务规划的国内外研究现状,重点总结了任务分配方法的常见模型和算法,对各种算法的优缺点进行了讨论,得出多智能体的市场机制类算法在空战中将有广泛的应用价值。文献[7]建立了以合同网协议和多智能体系统理论为基础的有人机/无人机编队MAS(Multi-agent System,MAS)结构和基于投标过程的无人机任务分配模型。文献[8]在无人机协同多任务分配的研究中,运用了基于分工机制的蚁群算法进行求解,并给出了基于作战任务能力评估的问题解构造策略和基于作战任务代价的状态转移规则,大幅度提升了算法的性能。文献[9]以异构类型多目标多无人机任务分配问题为原型,设计了一种基于时间窗的多无人机联盟组任务分配方法,此算法使用冲突消解机制来防止无人机实时任务分配过程中出现多机资源死锁,其次通过无人机两阶段任务联盟构成算法,组成了任务联盟,使无人机任务分配的有效性和实时性有了很大的提高。文献[10]在基于任务依赖关系和ISO-DATA(Iterative Self-organizing Data Analysis Technique)算法相结合的基础上设计了新的任务分组方法,在保持无人机负载均衡的基础上,给出了基于资源福利的任务组级组粗粒度的无人机任务分配方法,在任务组内提出了结合粒子群算法的细粒度任务分配算法。文献[11]设计出一种多无人机任务分配与航迹规划相结合的整体控制架构,假设威胁和障碍区域为合理的多边形模型,使用改进的算法求出两个航迹点之间的最短路径,将此路径当成任务分配过程全局目标函数的输入,然后用粒子群优化任务分配迭代寻优。文献[12]详细分析了实际战场上信息的不确定性,同时指出了在此条件下多无人机面临的任务分配问题。将收益毁伤代价指标、目标价值及航程代价指标的不确定信息作为参考依据,在此基础上建立了基于区间信息环境下多无人机的任务分配模型,采用随机概率的多属性方案排序(Stochastic Multi-criteria Acceptability Analysis,SMAA)方法,得出不确定环境下多无人机动态任务分配求解方法。
无人机任务分配有多种分类方式,按照无人机作战任务之间的相关联性,可归类为协同任务分配和独立任务分配[13];按照无人机作战任务所处的环境,又可归类为静态任务分配和动态任务分配[14]。本文分别从集中式任务分配、分布式任务分配和分层次分布式任务分配三种分类方式论述无人机任务分配问题的研究现状。
1 集中式任务分配方法
集中式控制系统就是编队中的无人机之间的通信、信号的传输和控制均由唯一的一个控制中心来进行。以集中式控制系统为基础进行任务分配最常用的模型有多旅行商问题(Multiple Traveling Salesman Problem,MTSP)模型[15]、车辆路径问题(Vehicle Routing Problem,VRP)模型[16]、混合整数线性规划问题(Mixed-Integer Linear Programming,MILP)模型[17]、动态网络流优化(Dynamic Network Flow Optimization,DNFO)模型[18]、多处理器资源分配问题(Multiple Processors Resource Allocation,CMTAP)模型[19]等。
集中式求解方法还能够进一步分为最优化方法和启发式方法[20],其中最优化方法包括穷举法(宽度优先或深度优先)、整数规划、约束规划、图论方法等。如果问题有解,基于某些假设的基础上,最优化方法可以确保给出问题的最优解。但是,因为任务分配及协同规划问题的NP特性,问题规模越大,最优化方法的求解难度越大,时间耗费也越长。不同的是,启发式方法的目的是在可接受的时间范围之内计算出问题的满意解,它在计算时间和解质量之间进行折中,而不强求问题的最优解。启发式方法又能够进一步分为传统启发式算法和智能优化算法。
1.1 最优化方法
(1)穷举法指的是为了求得问题的最优解,而列举出可行解域内的全部可行解。这种方法适用于离散且问题规模较小的情况,问题规模变大且解的领域随之变大的情况下,使用该方法问题将会长时间得不到解决。文献[21]中的满意决策(Satisficing Decision,SD)方法可用于问题规模不大的情况,它在穷举法的基础上,将不可行或效率低的解去除掉,一定程度上缩减了解的搜索空间。
(2)整数规划方法(Mixed Integer Linear Programming,MIP)是根据既定的目的和目标,通过建立目标函数和约束条件的方法对规模较小的任务分配问题进行解决的一种最优化方法。矩阵作业法、单纯型法、匈牙利法、分支定界法等是比较常用的整数规划方法。文献[22]应用分支定界法解决多处理机的分配调度问题,这种方法适用于约束条件和变量数目较少的问题的求解,由于满足不了实时性要求而不适于解决规模较大的问题。
(3)约束规划(Constraint Programming,CP)方法由变量集和约束集两者组成[23],变量集内的所有变量都有自己对应的值域,且变量的取值也只能从其值域中选取,它是求解组合优化问题的一种通用方法。文献[24]在卫星空间资源的管理与调度中运用了约束规划方法与禁忌搜索算法相结合的方法,同时文献[25]还研究出了数个支持约束规划方法运行的工具包。
(4)图论方法是通过图示的方法把任务和接受任务的成员特征表述出来,同时在任务和系统成员之间用图论方法建立匹配,以此设计出合理可行的任务分配方案[3]。网络流模型和偶图匹配模型是两种经典的图论任务分配模型。文献[26]在两个处理器的任务分配问题中应用了网络流模型,文献[27]在任务网络和组织成员(agent)间的映射中应用了偶图匹配模型,同时表明该映射的优势是使得执行任务时消耗时间最少。图论方法可以比较清晰地表现出任务和系统成员的结构,但对于任务的数量和系统成员的数量比较多的情况不能得到有效的求解,有很大的局限性。
1.2 启发式方法
启发式方法(heuristic methods)与最优化方法不同,它的基本思想是在算法时间和求解结果两者之间进行调节,在能够接受的时间范围内求得局部最优解或满意解。列表规划(List Scheduling,LS)方法、聚类方法和负载均衡(Load Balancing,LB)方法是三种常见的启发式方法。
(1)列表规划(List Scheduling,LS)方法的步骤是首先建立任务的优先权函数,求得任务的处理次序,然后按照求得的任务处理次序将任务分派给系统成员。最常见的列表规划方法有动态列表规划(Dynamic List Scheduling,DLS)法、多维动态列表规划(Multi-Dimensional Dynamic List Scheduling,MDLS)方法、多优先级动态列表规划(Multi-Priority List Dynamic Scheduling,MPLDS)等。文献[28]在作战任务的平台资源分配中运用了MDLS方法,文献[29]利用DSL方法解决了异构网络系统中的计算资源分配问题,文献[30]运用MPLDS方法实现了作战任务的平台资源分配。
(2)聚类方法是通过将每个任务作为一个簇进行聚类,直到任务簇与系统成员数目达到一致时停止聚类的一种启发式方法。将关键路径上的任务进行聚类,然后从任务图中将这些已聚类任务节点[31]移除是一个比较常用的聚类方法。文献[32]证明了聚类方法在解决多处理机资源调度的问题上有很好的应用前景。
(3)智能优化算法是20世纪70年代末被提出来的,近年来得到了广泛的应用。它是利用现代智能优化算法对任务分配问题进行优化求解的一种优化方法。这种方法与精确方法的全局搜索不同的是,它的目的是在能够接受的时间范围内求得自己满意的解,在求解的时间和解质量之间进行调节。它的优点是比较容易实现,同时计算不是很复杂,解的质量也比较高等。
①进化算法。随着计算机技术的快速发展,不断出现各种进化算法(Evolutionary Algorithm,EA),主要有遗传算法(Genetic Algorithm,GA)、遗传规划(Genetic Programming,GP)、进化策略(Evolution Strategy,ES)、进化规划(Evolutionary Programming,GP)等。EA是一种具有智能性和并行性等特点的全局优化算法,求解大规模问题时非常适合应用。文献[33]用遗传算法解决面向作战任务的平台资源分配,文献[34]用遗传算法解决异构计算系统的多处理机调度。许多学者针对遗传算法容易不收敛或局部收敛的不足进行了改进,可以有效应用到不同背景问题中,文献[35-36]应用了改进的遗传算法解决多目标优化问题。
②群智能算法(Swarm Intelligence Algorithm,SIA)模拟的是各种群体动物的自组织行为,基于此,学者们发明了许多包含新功能的且具有实用价值的工具。其中最著名的群智能优化算法是粒子群算法(Particle Swarm Optimization,PSO)和蚁群算法(Ant Colony Optimization,ACO)。蚁群算法模拟的是蚂蚁族群捕获食物的过程,是20世纪90年代初由意大利学者首度提出来的,在许多离散优化问题中得到成功应用。粒子群算法是20世纪90年代末提出的,文献[37]详细介绍了粒子群算法,刚开始仅仅是解决连续的优化问题,现在已越来越多的组合优化问题也开始应用[38]。群智能算法的不足之处是非常容易陷入局部收敛。文献[39]在工程项目的资源分配问题中应用了ACO算法,文献[40-44]分别对单目标和多目标任务分配问题进行了优化,在多处理器任务分配和武器分配中应用了PSO算法。
③其他智能优化方法还包括人工免疫(Artificial Immune,AI)算法、禁忌搜索(Tabu Search,TS)算法、模拟退火(Simulated Annealing Algorithm,SA)算法等,在任务分配中也将有较广泛的应用空间。
启发式方法的优点是计算效率高,同时求得的解的质量也较高,可是基于不同的假设和约束条件需要设计新的启发式规则,即灵活性和可拓展性比较差。上述的两种启发式算法虽然可以在比较短的时间内求得问题的可行解,但却不能保证可以求得问题的最优解,存在一定的局限性。
2 分布式任务分配方法
分布式控制系统与集中式控制系统不同的是实现信号传输的方式,前者无人机还可以在编队内进行通信,具有更好的灵活性。分布式控制系统结构相比集中式控制系统结构来说对无人机的要求更高,需要无人机具备独立计算、分析与决策等能力。基于分布式控制系统结构的任务分配方法主要有基于合同网市场竞拍机制的方法、分布式模型预测控制方法、基于蚁群算法的多无人机任务分配方法、基于粒子群优化算法的多无人机任务分配方法等。
2.1 合同网方法
目前,合同网(ContractNet)是应用范围最广的一种分布式任务分配方法,它的核心是为防止产生冲突,对每个问题的求解用通信的方式协商处理。文献[45]介绍了合同网方法的提出及发展。合同网方法有发布者和竞标者两个角色,由“招标-投标-中标-确认”4个交互阶段组成。在合同网协作方法中,系统成员的角色不用提前规定,任何系统成员可以是管理者,也可以是工作者,区别只在于成员是发布任务通知还是应答任务通知,于是任务能够被层次地分解分派。这种方法的缺点是通信量大、作为发布者的系统成员工作强度大且任务分解分配没有有效融合等,针对这些问题,研究人员进行了改进和延伸,文献[46-47]表明合同网方法可以成功地解决卫星资源和作战目标等任务分配问题。
2.2 拍卖方法
拍卖方法是实现资源配置的一种市场机制,指的是买方在清楚了解拍卖规则的前提下,采用竞价的方式决定特定物品的价格,也就是将要拍卖的物品用公开竞价的方式转卖给应价最高(最低)者的一种交易方式。一个拍卖主要由参与方、拍卖品、收益函数和应价策略4个要素组成,在无人机任务分配问题中,无人机需要执行的任务可视为拍卖品,无人机的任务分配方和任务接受方共同组成参与者,且双方都有各自对应的收益函数和出价策略。拍卖方法是一种协商协议,因其规则明确且便于操作,近年来受到越来越多学者们的关注。拍卖方法用明确的规则引导买卖双方进行交互,可操作性非常强,能在较短时间内将资源合理分配,得到问题的最优解或较优解。该方法现已广泛运用在无人机作战和传感器等资源分配问题中[48-50]。
3 分层次分布式任务分配方法
分层次分布式控制系统(见图1)同时具有集中式和分布式控制系统结构双方的优点,是一种混合的控制系统结构。将所有的无人机根据一定的规则进行分层和归类,先根据类别分组,同一层次的无人机类和同一组内的无人机选择集中式控制系统结构,不同的组和控制中心则选择分布式控制系统结构。这种控制系统结构在无人机执行作战任务时,具有很大的灵活性,可以自主根据真实状况调节与控制中心之间信息的交流量,一定程度上减少了计算时间,同时还可以根据实际战场情况适时地调整任务分配策略,更加满足实际战场的要求。
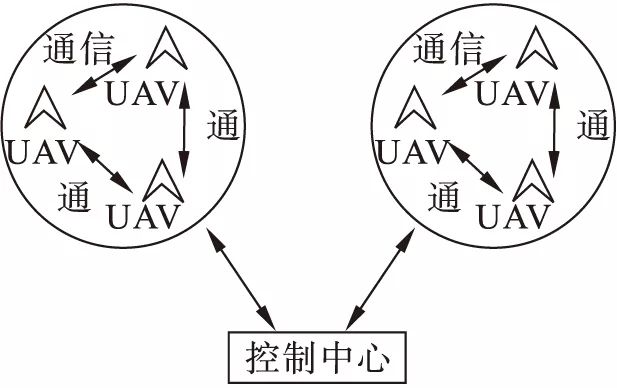
图1 分层次分布式控制系统结构
4 关键技术及未来发展趋势
4.1 不确定条件下的任务分配
如今的任务分配方法一般都偏重于解决确定条件下的分配问题,而在现实中,因为任务环境的部分可观性,还有传感器和情报信息的误差,未知的对抗、规划时所依赖的环境信息等是不确定的。另外,任务分配实施的结果也可能存在误差,这会对任务的成败形成不可逆的影响。所以,在任务分配过程中尽可能对以上不确定性因素加以考虑,其中对信息的不确定性可以运用概率统计等方法进行处理。
4.2 异构多类型无人机的协同任务分配
目前,多无人机协同任务分配主要是研究同类型多无人机的分配问题,即仅需要考虑多无人机对同一作战目标的不同任务之间的时序要求。但是实战中,无人机任务规划系统必须具有协同规划能力,只有这样,才能保证多个飞行平台在时域、空域和频域具有一致性,满足无人机协同任务的作战要求。异构无人机系统非常复杂,在满足各方面因素和约束的条件下,如何制定合理有效的作战机制、体系满足实际战场的需求;如何在某一类型的异构无人机数量短缺的情况下,选择其他合适的无人机互相配合去更加有效地完成任务;异构无人机所携带的作战使命、传感器、作战半径、战术使命、作战意图等都不一样,为了得到精准的需求信息,如何对异构多类型无人机载传感器采集的信息进行有效快速的融合;为了实现各种性能指标的最优化,如何将不同种类的任务分配给适合的异构无人机;为满足战场的实际需求,指挥控制中心应该如何派遣数量恰当的异构无人机等都是将来研究多无人机协同任务分配问题必须深入考虑的方向。
4.3 动态实时任务分配
在无人机执行任务的过程中,当既定目标和外部环境发生改变时,保证任务的成功率非常重要,所以进行实时任务规划具有实际的研究意义。实时任务规划不仅需要克服信息的动态性和不确定性所带来的影响,而且还需要在有限的时间及计算资源的条件下给出合理有效的规划结果,使得该问题具有非常高的复杂性和求解难度。在实时的动态任务规划中,需要综合考虑真实模型、简化模型、局部最优以及全局最优等各个方面,如何求解出合理、有效的最优解或满意解,还需要进行深入的研究与探索。
4.4 静态博弈
作战环境越来越繁杂,出现各种各样的无人机作战方式,而多机协同作战能够实现同时攻击多个敌方目标,具有较高的杀伤概率,因而将成为将来空中作战的主流方向。然而,多无人机在执行任务中,不仅需要考虑己方的方案策略,同时也要考虑敌方的方案策略,能否成功完成任务的关键问题之一是如何在双方预选的策略集中,选择双方合理的决策策略,使得无人机之间能够相互协调完成复杂任务,这将是无人机领域研究的重要问题。
传统的无人机协同作战是仅考虑己方的最优决策问题,而博弈论是考虑双方的最优决策策略问题。博弈的三要素包含局中人集、局中人的策略集、局中人的支付函数。目前有关博弈策略的研究有完全信息静态博弈和不完全信息静态博弈,如何在全面考虑众多约束条件情况下建立模型并且求得纳什均衡解,还需要进行深入研究与探索。
4.5 动态博弈
无人机编队空战是多阶段动态博弈的过程。包含零和博弈和非零和博弈:零和博弈是指博弈双方的支付值的和为零,即我方的收益等于敌方的支出;非零和博弈是指参与者双方的支付值的和不为零,即我方的收益值不等于敌方的支付值。多无人机空战动态博弈通常包含六个要素:1)博弈的参与者,博弈的参与者为我方无人机和敌方空战战斗机;2)无人机空战动态博弈的策略,是指敌我双方无人机有先后顺序选择自己的行动策略;3)策略组合,在动态博弈中,每个参与者行动时都会在自己的行动集中选择一个行动,一个阶段选出一个行动,这些行动构成一个行动组合,而每个参与者行动时选出一个行动组合称为策略组合;4)信息,包含为完美信息博弈和不完美信息博弈;5)博弈的支付,是指博弈双方根据自己的所选策略得到的收益值;6)博弈的均衡,博弈的均衡是指所有参与者的最优策略的组合。动态博弈的求解存在很大的难度,随着双方博弈次数增加,双方的策略组合将呈指数增长,如何求解各个阶段动态博弈的纳什均衡,还需要进行深入的研究与探索。
4.6 多要素综合任务分配
武器装备的不断发展和作战样式的不断转变,使得无人机的任务类型日趋复杂化,随着传感器的使用、电子干扰等众多因素相互融合,任务规划问题从之前单一型规划问题转换为考虑多个因素的综合型问题。而各要素间相对独立的同时还相互影响,使得规划问题的建模与求解比较困难。如何研究有效的多要素综合任务规划方法,保持每个要素求解过程相对独立的同时,用比较高的效率规划出合理、一致的任务计划使得整体的任务效能达到最优,还需要进行深入研究与探索。
5 结束语
随着无人机任务规划技术的发展,不断出现任务分配的新理论、新方法,无人机任务规划技术越来越成熟,研究的对象越来越复杂,研究的内容越来越深化,研究的范围也越来越扩大,与实际应用联系越来越紧密。研究无人机任务规划技术对提高多无人机的作战效能具有极为重要的理论和实际意义。
参考文献(References):
[1]何凡,吴文海,曲建岭.美国海军无人机系统的发展现状、趋势及关键技术[J].飞机设计,2007,27(1):62-65.
[2]李春锦,文泾.无人机系统的运行管理[M].北京:北京航空航天大学出版社,2011.
[3]马巧云.基于多Agent系统的动态任务分配研究[D].武汉:华中科技大学,2006.
[4]李炜,张伟.基于粒子群算法的多无人机任务分配方法[J].控制与决策,2010,25(9):1359-1364.
[5]邸斌,周锐,丁全心.多无人机分布式协同异构任务分配[J].控制与决策,2013,28(2):274-278.
[6]朱毅,张涛,程农,等.多 UAV协同任务规划研究[J].系统仿真学报,2009(20):194-199.
[7]刘跃峰,张安.有人机 /无人机编队协同任务分配方法[J].系统工程与电子技术,2010,32(3):584-588.
[8]苏菲,陈岩,沈林成.基于蚁群算法的无人机协同多任务分配[J].航空学报,2008(29):184-191.
[9]林林,孙其博,王尚广,等.基于时间窗的多无人机联盟任务分配方法研究[J].电子与信息学报,2013,35(8):1983-1988.
[10]谭何顺,曹雷,彭辉,等.一种多无人机层次化任务分配方法[J].解放军理工大学学报(自然科学版),2014,15(1):18-24.
[11]孙小雷,齐乃明,董程,等.无人机任务分配与航迹规划协同控制方法[J].火力与指挥控制,2015,37(12):2772-2776.
[12]陈侠,唐婷.不确定环境下多无人机动态任务分配方法.火力与指挥控制[J].2013,38(1):45-49.
[13]KAUSHIK R.Task allocation and scheduling of concurrent applications to multiprocessor systems[C].Electrical Engineering and Computer Sciences University of California at Berkeley,2007.
[14]BUI H,HAN X,M ANDAL S,et al.Optimization-based decision support algorithms for a team-in-loop planning experiment[C]∥Proceedings of the 2009 IEEE International Conference on System s,M an,and Cybernetics,San Antonic,TX,USA,2009:4684-4689.
[15]SECREST B R.Traveling salesman problem for surveillance mission using particel swarm optimization[D].Wright-Patterson AFB:Air Force Institute of Technology,2003.
[16]O′ROURKE K P,BAILEY T G,HILL R,et al.Dynamic routing of unmanned aerial vehicles using reactive tabusearch[J].Military Operations Research Journal,2001(6):5-30.
[17]ALIGHANBARI M.Taskassignment algorithms for teams of UAVs in dynamic environments[D].Cambridge:Massachusetts Institute of Technology,2004.
[18]NYGARD K E,CHANDLER P R,PACHTER M.Dynamic network flow optimization modles for air vehicle resourceallocation[C]//Proceedingsofthe 2001 American Control Conference,2001,3:1853-1858.
[19]ALVARO E G.Stability Analysis of Network-based Cooperative Resource Allocation Strategies[D].Columbus:Ohio State University,2003.
[20]RASMUSSEN S,CHANDLER P,MITCHELL J W,et al.Optimalvs.Heuristic assignment of cooperative autonomous unmanned air vehicles,AIAA-2003-5586[R].Reston:AIAA,2003.
[21]叶媛媛,闵春平,沈林成,等.基于满意决策的多UAV协同目标分配方法[J].2005,27(4):116-120.
[22]FUJITA S,M ASUKAWA M,TAGASHIRA S.A Fast Branch-and-bound schemewith an improved lower bound for solving the multiprocessor scheduling problem [C]∥In Proc.of The International Conference on Parallel and Distributed Systems(ICPADS),2002:611-616.
[23]常朝稳,李黎.基于约束规划的旅游多车辆行程路线研究[J].计算机应用,2006,26(12):202-204.
[24]陈英武,方炎申,李菊芳,等.卫星任务调度问题的约束规划模型[J].国防科技大学学报,2006,28(5):126-132.
[25]EKELIN C,JONSSON J.Solving embedded system scheduling problems using constraint programming [J].In IEEE Real-Time Systems Symposium,O rlando,Florisa,USA,Nov,2000(8):26-30.
[26]STONE H.Multiprocessor scheduling with the aid of network flow A lgorithms[J].IEEE Transactions on Software Engineering,1977,SE-3(1):85-93.
[27]LEVCHUK G M,LEVCHUK Y N,PATTIPATI K R,et al.Mapping flows onto networks to optimize organizational processes [C]//Proceedings of the 7-th Command&Control Research& Technology Symposium,2002,M onterey,CA,2002.
[28]LEVCHUK,G M,LEVCHUK Y N,LUO J,et al.Normative design of organizations-part I:mission planning [J].IEEE Transactions on Systems,M an,and Cybernetics,2002,32(3):346-359.
[29]SIH G,LEE E.A Compile-time scheduling heuristic for interconnection constrained heterogeneous processor architectures [J].IEEE Transactions on Parallel and Distributed Systems,1993,4(2):175-187.
[30]阳东升,张维明,刘忠,等.战役任务计划的数学描述与求解算法研究[J].系统工程理论与实践,2006,6(1):26-34.
[31]KIM S J,BROWNE J C.A general approach to mapping of parallel computation upon multiprocessor architectures [C]∥In Proceedings of the International Conference on Parallel Processing,1988.
[32]HOANG P D,RABAEY J M.Scheduling of DSP programs onto multiprocessors for maximum throughput [J].IEEE Transactions on Signal Processing,1993,41(6):2225-2235.
[33]张杰勇,姚佩阳,周翔翔等.基于DLS和GA的作战任务-平台资源匹配方法[J].系统工程与电子技术,2012,34(5):947-954.
[34]张聪,马义忠.异构计算系统中基于遗传算法的任务分配与调度[J].微电子学与计算机器,2004,21(6):74-79.
[35]王瑞琪,张承慧,李珂.基于改进混沌优化的多目标遗传算法[J].控制与决策,2001,26(9):1391-1397.
[36]李玥,孙建国.基于遗传算法的航空发动机多目标优化PID控制[J].航空动力学报,2008,23(1):174-178.
[37]J.KENNEDY,R.EBERHART,Particle sw arm optimization[C].Proc.IEEE Int.Conf.on Neural Networks,Perth,Australia,1995:1942-1948.
[38]余廷芳,彭青华.遗传粒子群混合算法在电厂机组负荷组合优化中的应用[J].电气自动化设备,2010,30(10):22-26.
[39]李志洁,刘向东,段晓东.改进粒子群算法在网络资源分配中的优化[J].计算机集成制造系统,2009,15(12):2375-2382.
[40]叶文,朱爱红,欧阳中辉,范洪达.基于混合离散粒子群算法的多无人作战飞机协同目标分配[J].兵工学报,2010,31(3):331-336.
[41]施展,陈庆伟.基于改进的多目标量子行为粒子群优化算法的多无人机协同任务分配[J].南京理工大学学报,2012,36(6):945-951.
[42]蒋建春,汪同庆,曾素华.求解异构并行系统任务分配的混合离散粒子群算法[J].控制与决策,2011,26(9):1315-1320.
[43]张新贵,武小悦.基于自适应粒子群算法的航天测控系统任务可靠性分配[J].航空动力学报,2012,27(9):2147-2154.
[44]霍霄华,陈岩,朱华勇,等.多UCAV协同控制中的任务分配模型及算法[J].国防科技大学学报,2006,28(3):83-88.
[45]SM ITH R G.The Contractnet Protocol:High-Level Communication and Control in a Distributed roblem Solver [J].IEEE Transaction on Computers,1980,C-29(12):1104-1113.
[46]高黎,沙基昌.基于合同网的分布式卫星系统任务优化分配研究[J].宇航学报,2009,30(2):815-820.
[47]陈华东,王航宇,王树宗,等.基于合同机制的协同作战分布式目标分配研究[J].系统仿真学报,2009,21(16):5116-5119.
[48]PALMER D,KIRSCHENBAUM M,ZAJAC K,et al.Decentralized cooperative auction for multiple agent task allocation using synchronized random number cenerators[C]∥Proceedings of the 2003 IEEE /RSJ Intl Conference on Intelligent Robots and System s.LasVegas,Nevada:IEEE Press,2003:1963-1968.
[49]WOOSUN A,PARK C,PATTIPATI K,et al.HMM and auction-based formulations of ISR coordination mechanism s for the expeditionary strike group missions[C]∥Proceedings of the 14th International Command and Control Research and Technology Symposium,W ashington,D.C.,June 2009.
[50]翁楚良,陆鑫达.一种基于双向拍卖机制的计算网格资源分配方法[J].计算机学报,2006,29(6):1004-1009.
(责任编辑:陈素清 英文审校:齐义文)
Abstract:As part of mission planning,task allocation is an important guarantee for the unmanned aerial vehicle(UAV)to accomplish military tasks and has been an active research topic in UAV combat systems.First,the basic concept of UAV task allocation was introduced.Then,the task allocation of UAV was summarized from centralized,distributed and hierarchical distributed allocations.Finally,the key technologies and future development trend of UAV task allocation were analyzed.Suggestion on the future study was put forward in terms of the cooperative task allocation of heterogeneous multi-type UAV,task allocation under uncertain conditions,static game,dynamic game,dynamic real-time task allocation,and multi-factor integrated task allocation.
Key words:task allocation;centralized;distributed;hierarchical distributed
收稿日期:2016-09-25
基金项目:国家自然科学基金(项目编号:61503255);沈阳科技资助项目(项目编号:14042200,14231129)
文章编号:2095-1248(2016)06-0001-07
中图分类号:TP391.41
文献标志码:A
doi:10.3969/j.issn.2095-1248.2016.06.001
长按识别图中二维码关注我们!