小鹏P7发生致命车祸!辅助驾驶缘何频频出事
![]()
新智元报道

新智元报道
【新智元导读】近日,一辆小鹏汽车在开启了L2辅助驾驶系统下,仍与前方静止车辆发生惨烈追尾。网传聊天记录显示,司机当时正在分神。

直击事故现场



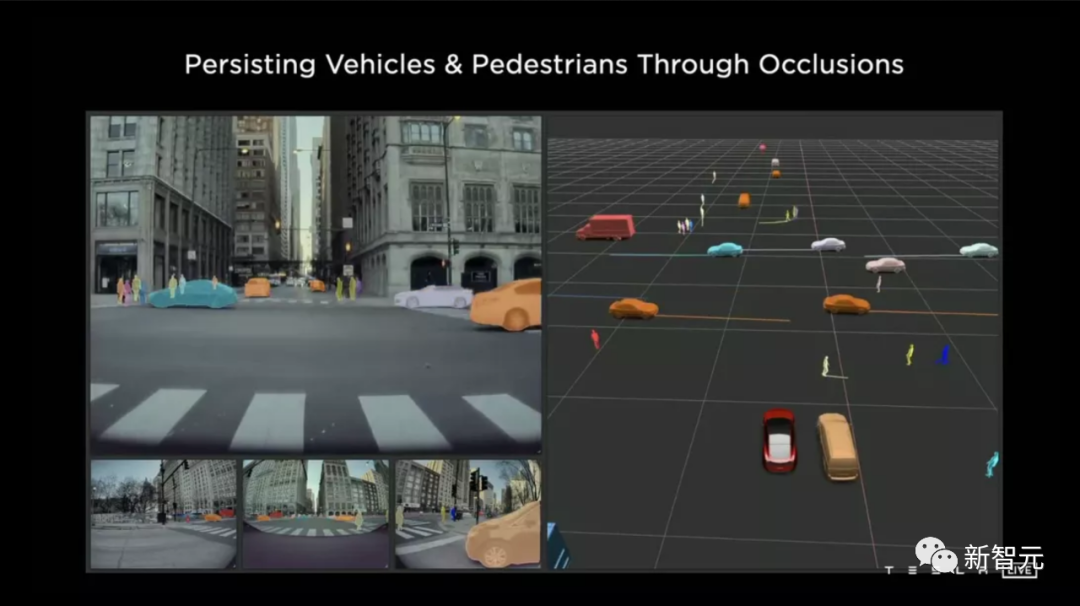
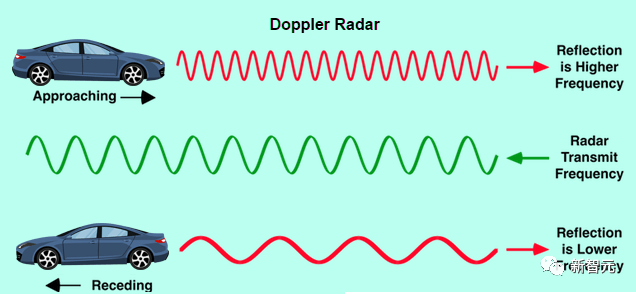
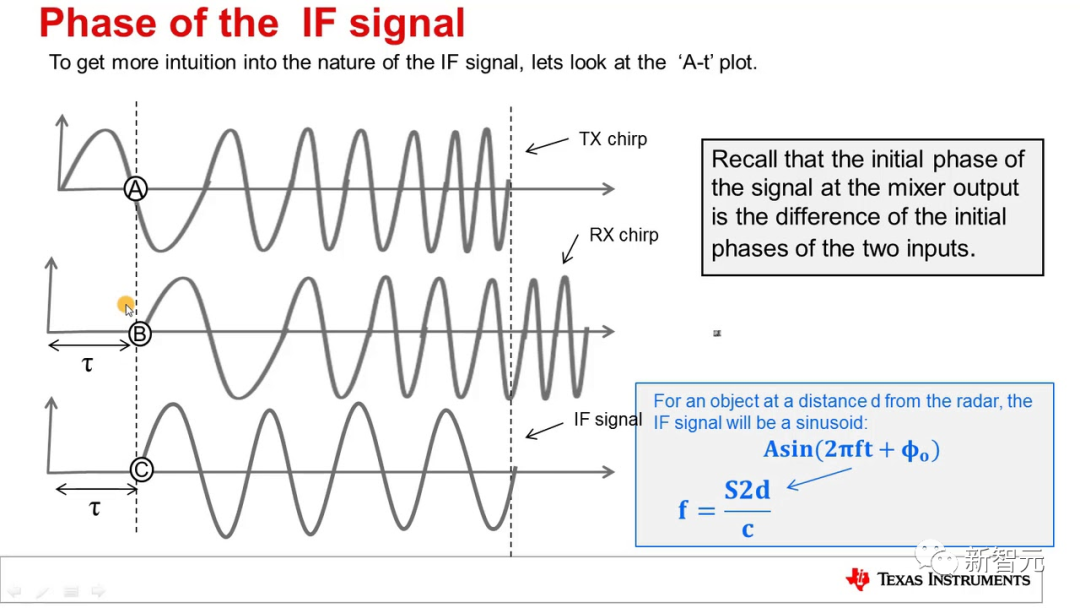
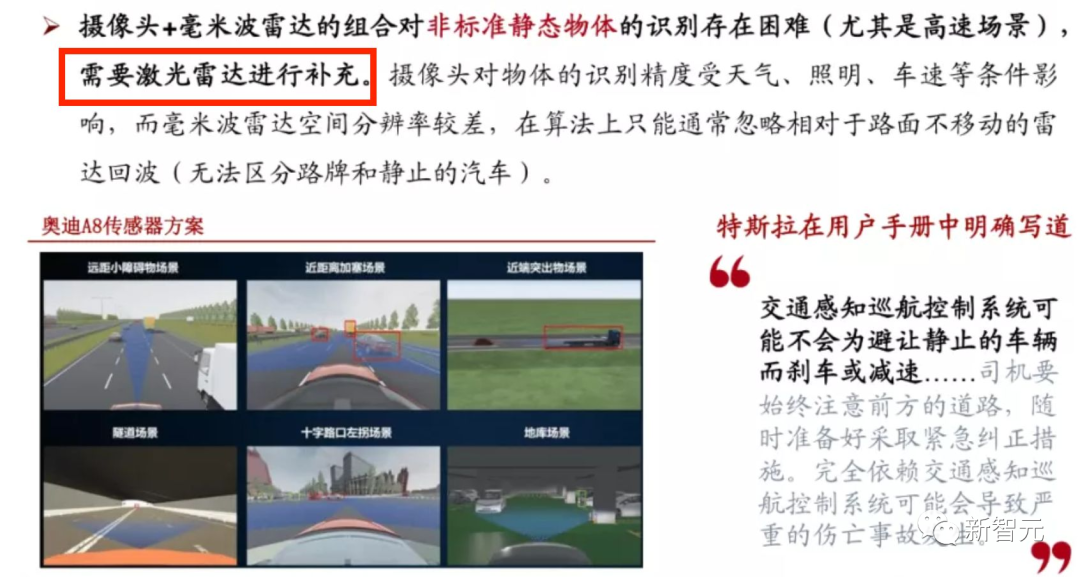
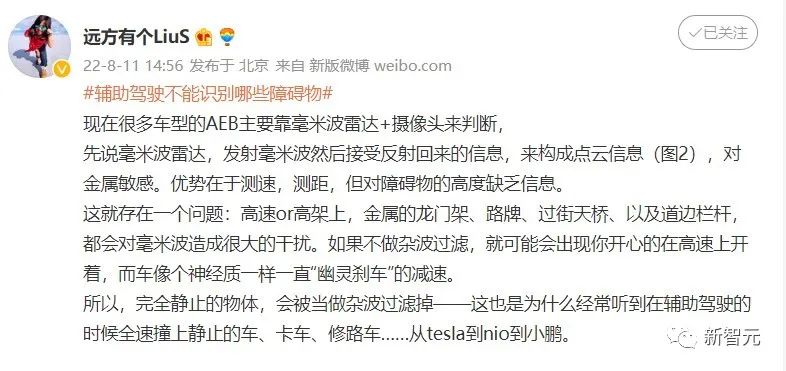
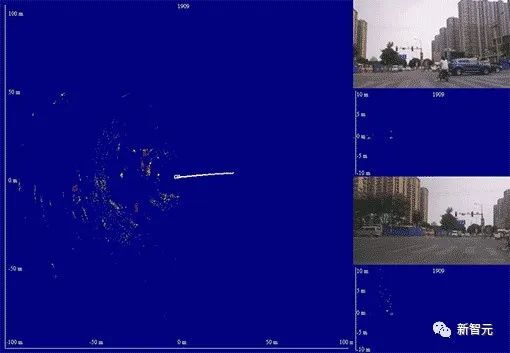
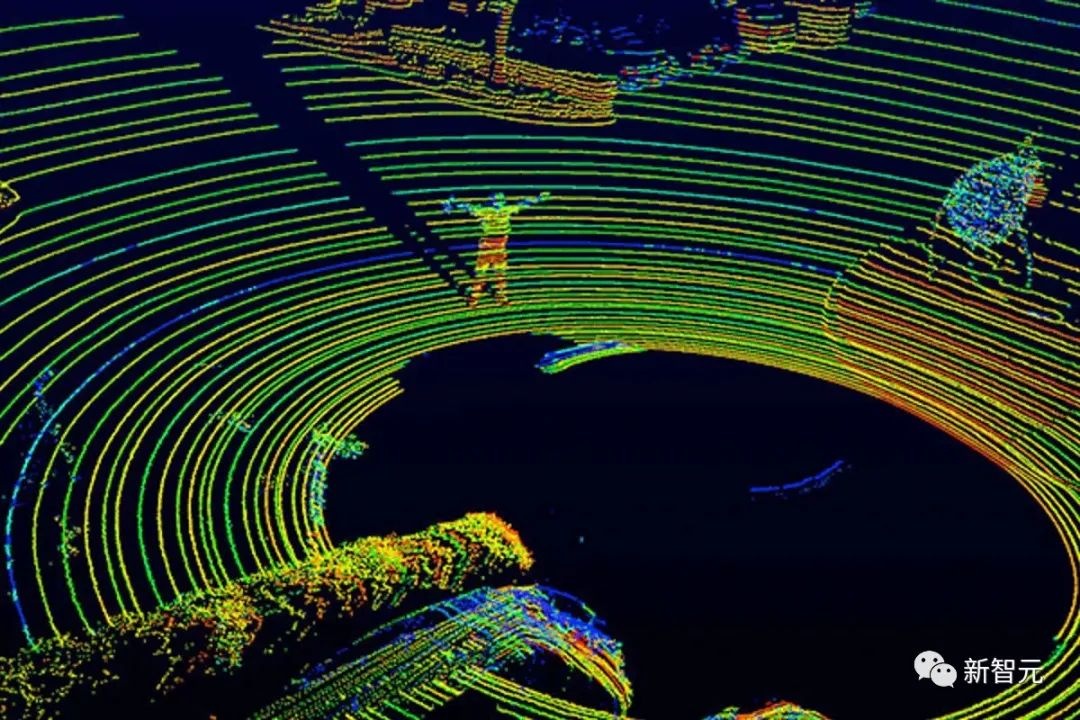
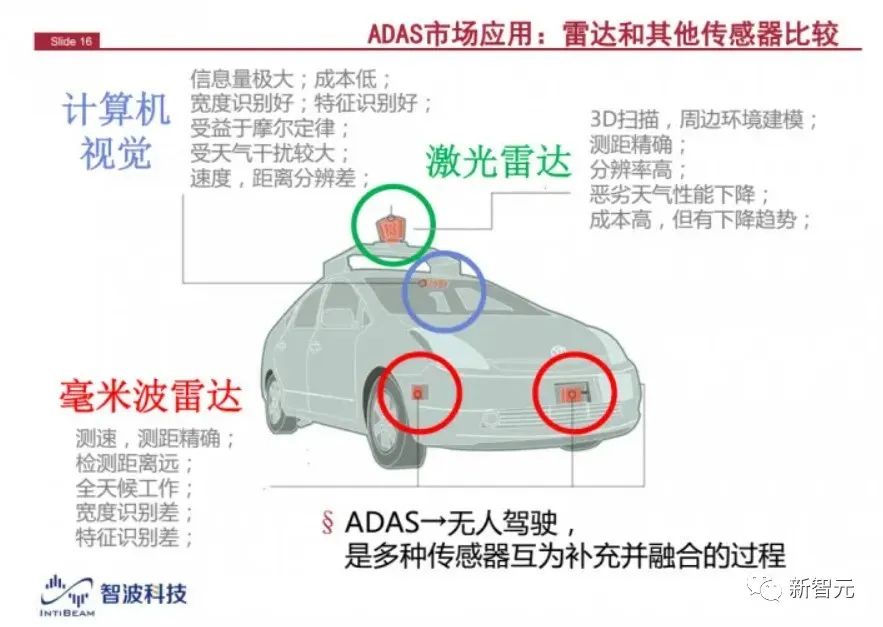
毫米波雷达的「克星」:静态目标


AEB未激活?

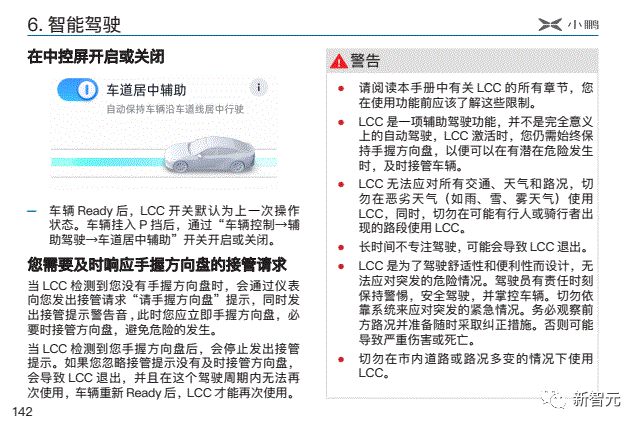
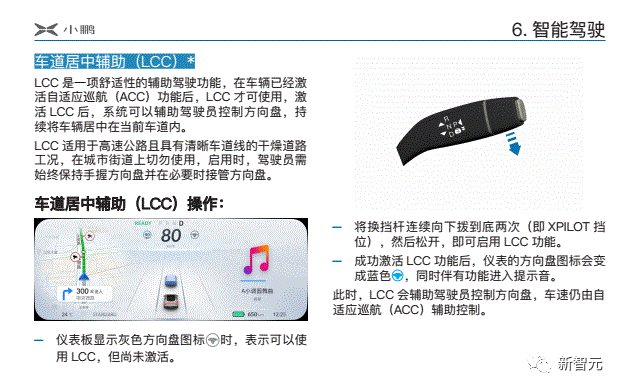
再说一遍,这不是自动驾驶
经核实,8月10日下午,宁波一车主驾驶车辆与前方检查车辆故障人员发生碰撞,发生人员伤亡。我们为本次事故中不幸离世的遇难者感到悲痛和惋惜。目前交警部门已经立案处理,门店已第一时间已前往现场协助处理。我们将全力配合相关部门进行事故调查,持续跟进后续结果,并协助客户处理后续相关事宜。



登录查看更多
相关内容
专知会员服务
14+阅读 · 2019年11月22日
Arxiv
0+阅读 · 2022年11月28日
Arxiv
0+阅读 · 2022年11月25日
Arxiv
11+阅读 · 2018年3月23日
相关VIP内容
专知会员服务
14+阅读 · 2019年11月22日
相关资讯
相关论文
Arxiv
0+阅读 · 2022年11月28日
Arxiv
0+阅读 · 2022年11月25日
Arxiv
11+阅读 · 2018年3月23日