【CVPR2020-Oral-牛津-Facebook】从单个图像进行端到端的视图合成,SynSin-View Synthesis
http://www.robots.ox.ac.uk/~ow/synsin.html
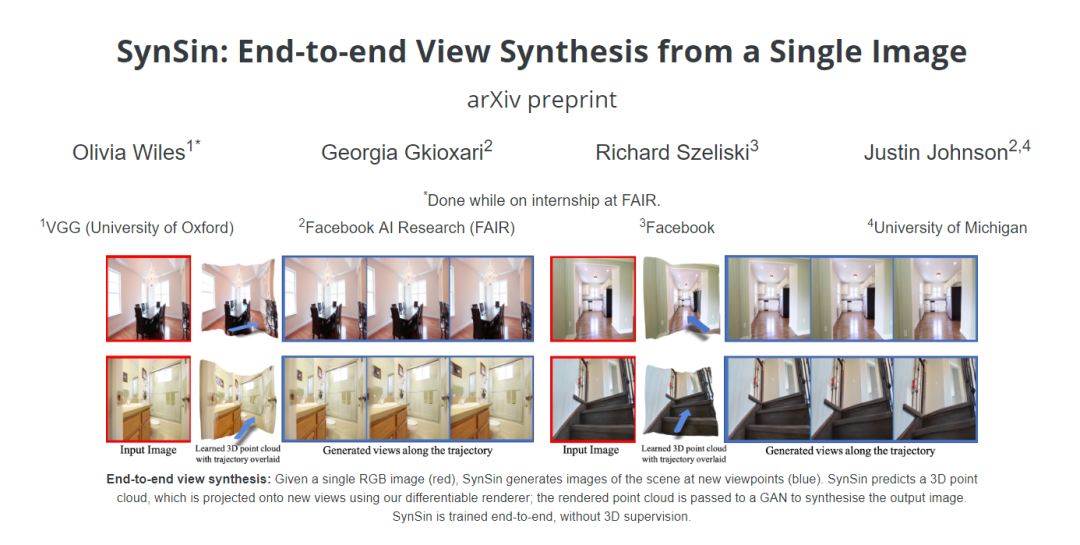
我们提出了一种单一图像视图合成方法,允许从单一输入图像生成新的场景视图。这是一个挑战,因为它需要从一个单一的图像全面理解3D场景。因此,目前的方法通常使用多幅图像,在地面真实深度上训练,或者局限于合成数据。为此,我们提出了一种新颖的端到端模型;它被训练在真实的图像上,没有使用任何真实的3D信息。为此,我们引入了一种新的可微点云渲染器,用于将潜在的3D点云特征转换为目标视图。我们的细化网络对投影特征进行解码,插入缺失区域,生成逼真的输出图像。我们的生成模型内部的3D组件允许在测试时对潜在特征空间进行可解释的操作,例如,我们可以从单个图像动画轨迹。与以前的工作不同,我们可以生成高分辨率的图像,并推广到其他输入分辨率。我们在Matterport、Replica和RealEstate10K数据集上超越基线和前期工作。
专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“VS3D” 就可以获取《【CVPR2020-Oral-牛津-Facebook】从单个图像进行端到端的视图合成》专知下载链接



登录查看更多
相关内容
Arxiv
5+阅读 · 2019年2月14日
Arxiv
11+阅读 · 2018年6月16日




相关VIP内容
相关资讯
相关论文
Arxiv
5+阅读 · 2019年2月14日
Arxiv
11+阅读 · 2018年6月16日