目标检测损失函数Loss大盘点
点击上方“CVer”,选择加"星标"置顶
重磅干货,第一时间送达

本文作者:Augus
https://zhuanlan.zhihu.com/p/235533342
本文已由原作者授权,不得擅自二次转载
L2, L1, smooth L1
表示
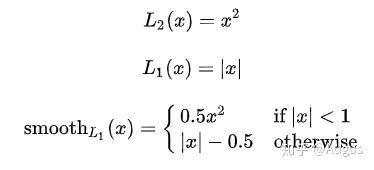
smooth L1 loss 相对于 L2 loss的优点:
当预测框与 ground truth 差别过大时,梯度值不至于过大;
当预测框与 ground truth 差别很小时,梯度值足够小。
Focal Loss
动机
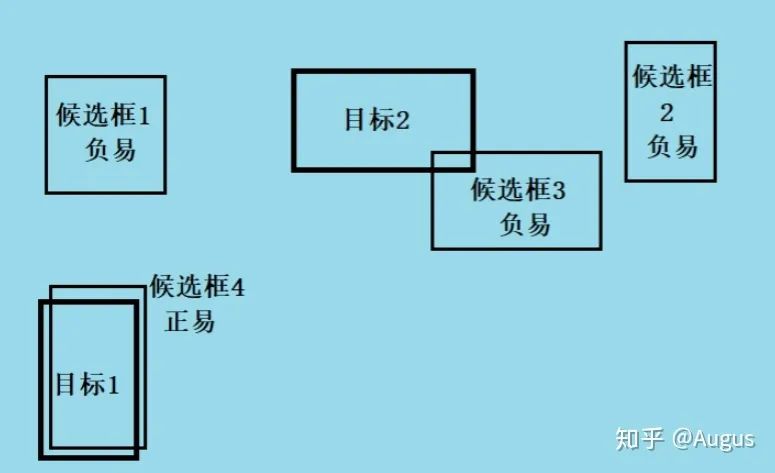
在one-stage检测算法中,会出现正负样本数量不平衡以及难易样本数量不平衡的情况,为了解决则以问题提出了focal loss。
hit的检测框就是正样本。容易的正样本是指置信度高且hit的检测框,困难的负样本就是置信度低但hit的检测框,容易的负样本是指未hit且置信度低的检测框,困难的负样本指未hit但置信度高的检测框。
表现形式

目的是解决样本数量不平衡的情况 - 正样本loss增加,负样本loss减小 - 难样本loss增加,简单样本loss减小
参考配置: 

IoU loss
本文由旷视提出,发表于2016 ACM
UnitBox: An Advanced Object Detection Network
4个坐标点独立回归的缺点
通过4个点回归坐标框的方式是假设4个坐标点是相互独立的,没有考虑其相关性,实际4个坐标点具有一定的相关性
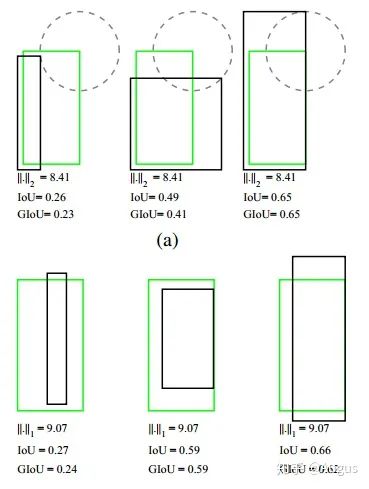
不具有尺度不变形
可能存在相同的l1 或 l2 loss(如下图),但是IOU不唯一。
表示

优点
尺度不变性,也就是对尺度不敏感(scale invariant), 在regression任务中,判断predict box和gt的距离最直接的指标就是IoU。(满足非负性;同一性;对称性;三角不等性)
GIOU Loss
本文由斯坦福学者提出,发表于CVPR2019
论文:arxiv.org/abs/1902.09630
https://github.com/generalized-iou/g-darknet
IOU缺点
如果两个框没有相交,根据定义,IoU=0,不能反映两者的距离大小(重合度)。同时因为loss=0,没有梯度回传,无法进行学习训练。
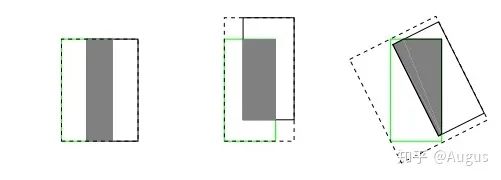
IoU无法精确的反映两者的重合度大小。如下图所示,三种情况IoU都相等,但看得出来他们的重合度是不一样的,左边的图回归的效果最好,右边的最差。
公式表示

C表示包含两个框的最小矩形
优点
尺度不变性
边框相交时,可以反映边框的相交情况
DIOU Loss
天津大学 AAAI 2020
论文:arxiv.org/abs/1911.08287
https://github.com/Zzh-tju/DIoU-darknet
GIOU Loss 的缺点
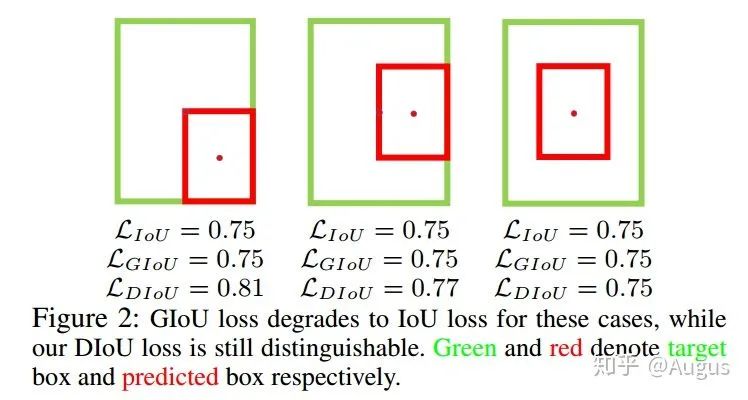
当目标框完全包裹预测框的时候,IoU和GIoU的值都一样,此时GIoU退化为IoU, 无法区分其相对位置关系,如下图三种情况GIOU loss是完全一致的。
公式表示

其中 

DIOU的优点
尺度不变性
相比于GIOU,优化距离替换优化面积,收敛速度更快。
解决GIOU的缺点:完全包裹预测框时loss一样的情况
CIOU Loss
天津大学 AAAI 2020
论文:arxiv.org/abs/1911.08287
https://github.com/Zzh-tju/DIoU-darknet
DIOU的问题
DIOU没有考虑到检测框的长宽比。长宽比更接近的边框应当有更低的loss。
公式表示

参数 

参考文章
1. https://zhuanlan.zhihu.com/p/101303119
2. https://zhuanlan.zhihu.com/p/104236411
3. https://zhuanlan.zhihu.com/p/80594704
资料下载
在CVer公众号后台回复:目标检测二十年,即可下载39页的目标检测最全综述,共计411篇参考文献。
下载2
后台回复:CVPR2020,即可下载代码开源的论文合集
后台回复:ECCV2020,即可下载代码开源的论文合集
后台回复:YOLO,即可下载YOLOv4论文和代码
重磅!CVer-目标检测 微信交流群已成立
扫码添加CVer助手,可申请加入CVer-目标检测 微信交流群,目前已汇集4100人!涵盖2D/3D目标检测、小目标检测、遥感目标检测等。互相交流,一起进步!
同时也可申请加入CVer大群和细分方向技术群,细分方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch和TensorFlow等群。
一定要备注:研究方向+地点+学校/公司+昵称(如目标检测+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群

▲长按加群

▲长按关注我们
整理不易,请给CVer点赞和在看!


