【观点】浙江大学苏宏业教授团队:MPC优化控制问题的可行域研究

导读
可行域在模型预测控制 (Model predictive control, MPC) 相关的优化控制问题中扮演着重要角色。可行域是指使得相关MPC优化控制问题有可行解的最大子状态空间,一旦系统状态运行到可行域以外,MPC控制器将得不到可行解从而导致系统故障。通常,较大的可行域表明相应的MPC算法具有较小的保守性,所以可行域常常用来从保守性方面评价MPC算法的优劣。同时,可行域也常被用来选择系统初始值,保证系统循环可行性等方面的设计。
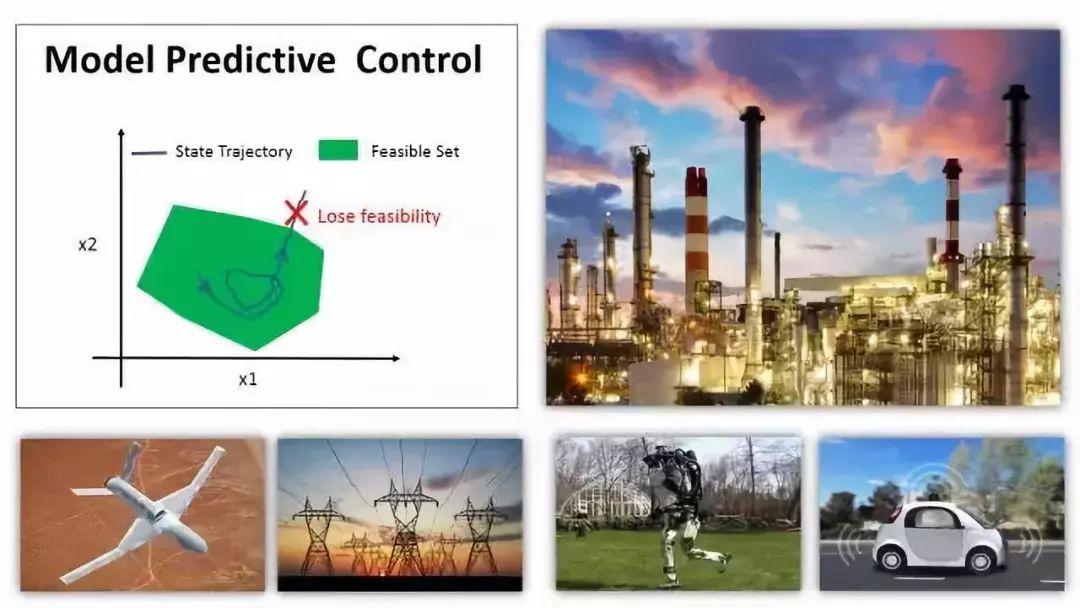
图1 模型预测控制中的可行域
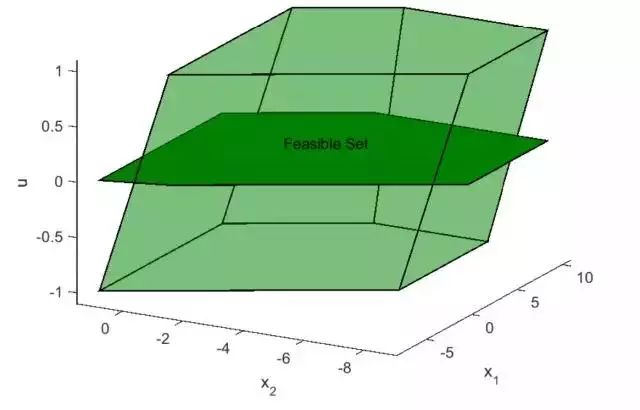
根据不同的MPC优化控制问题描述,可行域通常为椭圆体或多面体两种类型。由于椭圆体的大小与其加权矩阵的某种测度有关,这类可行域的大小是很容易求解的。多面体型的可行域的求解则要困难很多,现有的常规解法是利用正则投影,但这种方法的计算复杂度随着MPC优化问题参数的增加而急剧增加,往往参数达到几十时,计算量就庞大到无法完成(具体表现为电脑内存因中间计算变量的剧增耗光,导致求解终止)。
另外,正则投影法对MPC优化问题约束的描述有特定要求,当约束中存在正定式(如线性矩阵不等式)描述时,正则投影法则无法使用。求解多面体可行域还可以用多参数线性规划法和集合关联法,但多参数线性规划法会存在非唯一解的计算问题,集合关联法仅适用于没有松弛变量的MPC优化问题。
浙江大学苏宏业教授团队利用向量内积的几何意义,直接利用原MPC优化问题的约束条件构造求取可行域顶点的新优化问题,遍历地求解出可行域的所有顶点,从而求取可行域。该方法更广泛地适用于MPC优化问题(包含线性矩阵不等式约束和线性不等式约束)可行域的求解,并且求解速度受变量数目的影响较小,且避免了多参数线性规划法中存在非唯一解的问题,特别是在低维度状态可行域求解中具有显著效果。
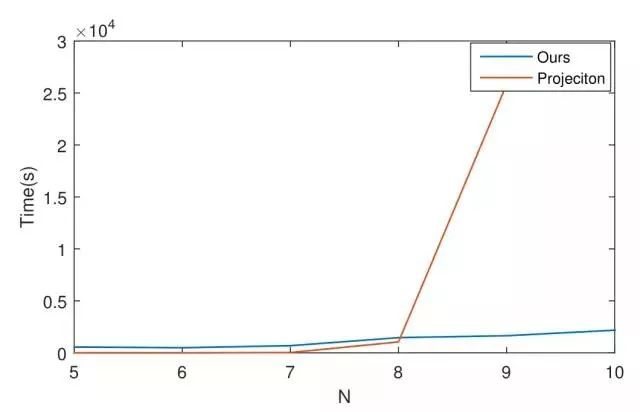
图3 不同参数数量下可行域计算时间对比
文章信息
L. T. Xie, L. Xie, H. Y. Su, and J. D. Wang, “Polyhedral feasible set computation of MPC-based optimal control problems,” IEEE/CAA J. of Autom. Sinica, vol. 5, no. 4, pp. 765−770, July 2018.

长按识别以上二维码或点击文末“原文链接”,可阅读全文。
作者简介


Lantao Xie,浙江大学博士研究生,主要研究方向为模型预测控制及机器学习。


Jingdai Wang,浙江大学教授,主要研究方向为多相流检测,信息处理等。
往期文章推荐

🔗【CAC2018】2018中国自动化大会论文投稿系统上线了!
🔗【通知】关于2018年度CAA科学技术奖励推荐工作的通知
🔗【重要通知】IEEE 人工智能与控制论国际研讨会
🔗 【重要通知】2018智能汽车跨界融合高峰论坛将于6月28日在江苏常熟召开
🔗 【重要通知】关于开展2018年CAA优秀博士学位论文奖励 及推荐工作的通知
🔗【IV18】第29届IEEE国际智能车大会将于6月在常熟召开






