【泡泡一分钟】利用线路图框架改进轨迹优化
每天一分钟,带你读遍机器人顶级会议文章
标题:Improving Trajectory Optimization using a Roadmap Framework
作者:Siyu Dai, Matthew Orton, Shawn Schaffert, Andreas Hofmann, and Brian Williams
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:孙钦
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文对几个有代表性的基于采样和基于优化的运动规划器进行了评估,然后我们引入了一个集成的运动规划系统,该系统将轨迹优化的最新进展纳入稀疏路线图框架。通过在4个常见的拥有5000个测试案例的应用场景中的实验,我们发现单独的基于优化或基于采样的规划器无法解决需要快速规划的实际问题。据我们所知,这是第一项在大量实验的基础上对最先进的运动规划器进行系统和全面的评估工作。
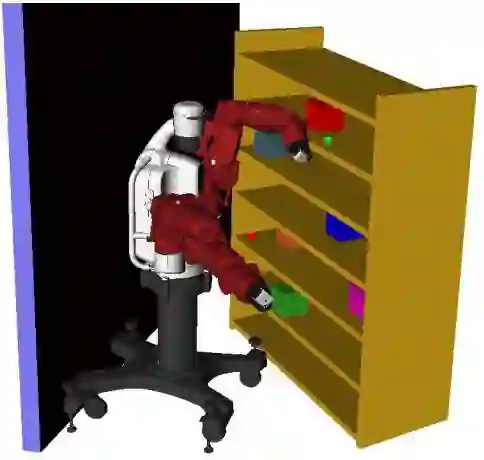
图1 实验环境图,本文选取了4个有代表性的场景:“tabletop with a pole”, “tabletop with a container”, “kitchen”, “shelf with boxes”(上图中场景)来测试不同路径规划方法的性能。
然后,我们将不同的独立规划器与轨迹优化相结合。结果表明,稀疏路线图和轨迹优化的结合有着较其他基于标准采样的规划器组合更优越的性能。我们的方法使用了多查询路线图而不是为每个规划问题生成全新的轨迹,并且我们的方法允许扩展,例如与跨规划问题的轨迹相关联的持久控制策略信息。此外,由路线图的稀疏性产生的次优性以及来自环境的意外干扰都可以通过实时轨迹优化过程来克服。
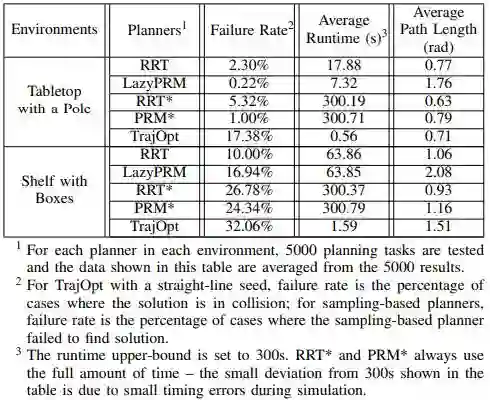
表1 基于采样和轨迹优化的运动规划方法比较。
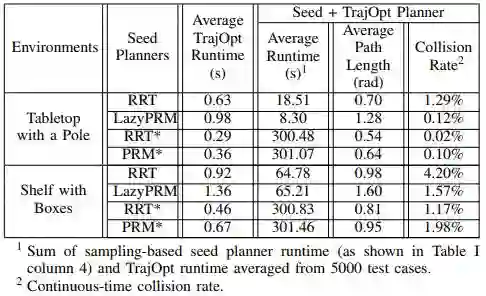
表2 “SAMPLING-BASED SEED +TRAJOPT”规划方法组合的性能评估。
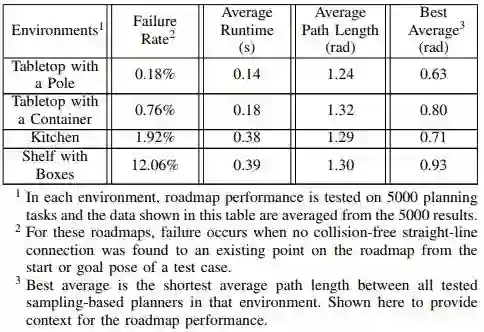
表3 在所有环境下的ROADMAP性能比较。
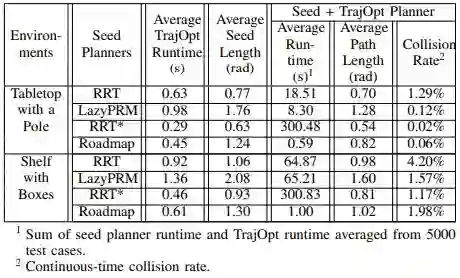
表4 “TRAJOPT SEEDED WITH SAMPLING-BASED PLANNER”方案和“ROADMAP”方案比较。
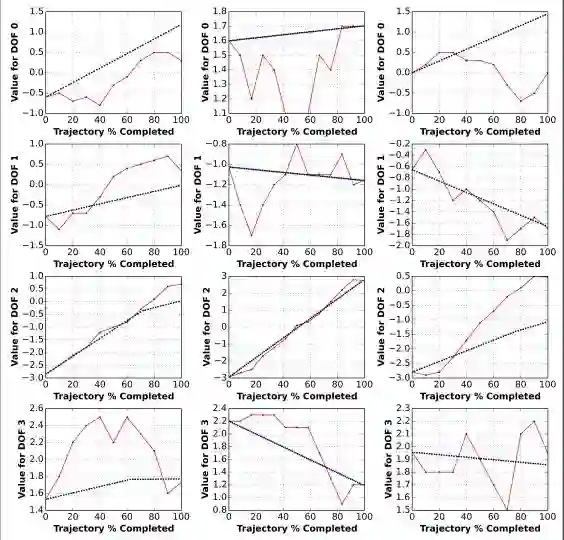
图2 Roadmap seed(红色实线)轨迹和对应的通过TrajOpt方法优化后的轨迹(蓝色虚线)。

Abstract
We present an evaluation of several representative sampling-based and optimization-based motion planners, and then introduce an integrated motion planning system which incorporates recent advances in trajectory optimization into a sparse roadmap framework. Through experiments in 4 common application scenarios with 5000 test cases each, we show that optimization-based or sampling-based planners alone are not effective for realistic problems where fast planning times are required. To the best of our knowledge, this is the first work that presents such a systematic and comprehensive evaluation of state-of-the-art motion planners, which are based on a significant amount of experiments. We then combine different stand-alone planners with trajectory optimization. The results show that the combination of our sparse roadmap and trajectory optimization provides superior performance over other standard sampling-based planners’ combinations. By using a multi-query roadmap instead of generating completely new trajectories for each planning problem, our approach allows for extensions such as persistent control policy information associated with a trajectory across planning problems. Also, the sub-optimality resulting from the sparsity of roadmap, as well as the unexpected disturbances from the environment, can both be overcome by the real-time trajectory optimization process.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





