提升小目标检测的思路
点击上方“CVer”,选择加"星标"或“置顶”
重磅干货,第一时间送达

本文作者:高毅鹏 | 编辑:极市平台
https://zhuanlan.zhihu.com/p/121666693
本文已由原作者授权,不得擅自二次转载
数据增强
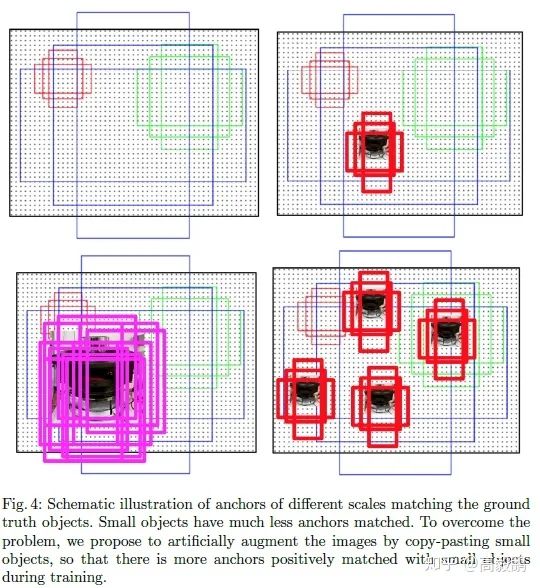
Oversampling
Augmentation
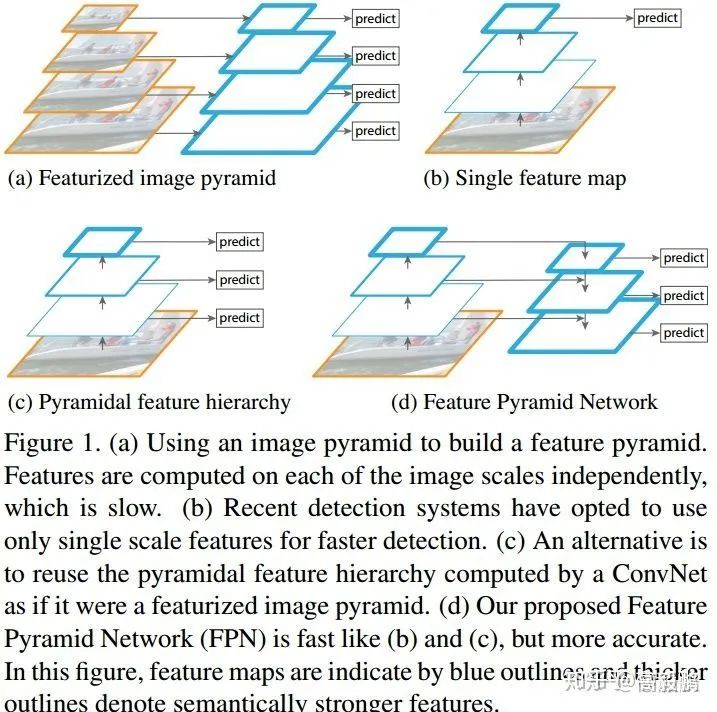
特征融合
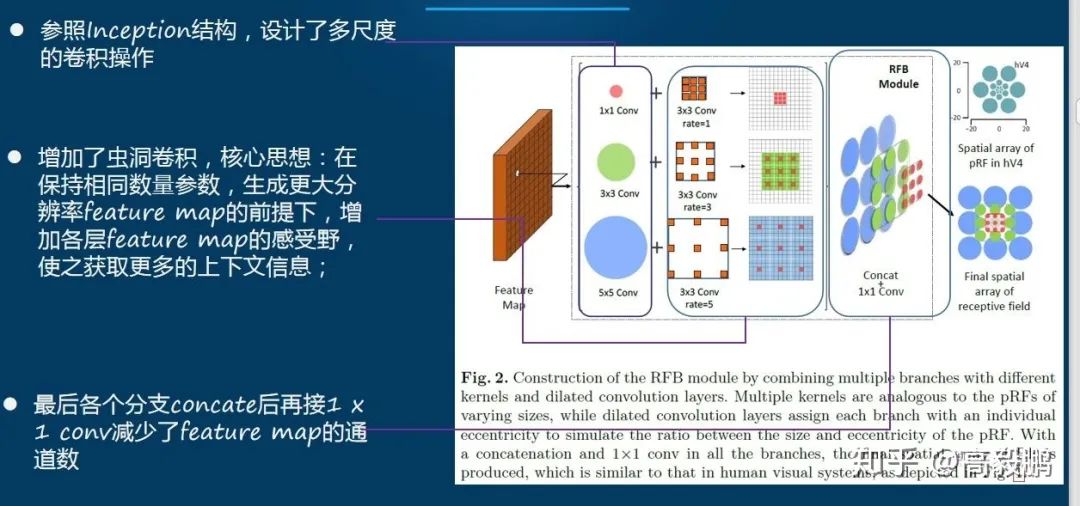
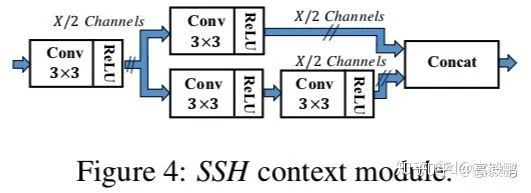
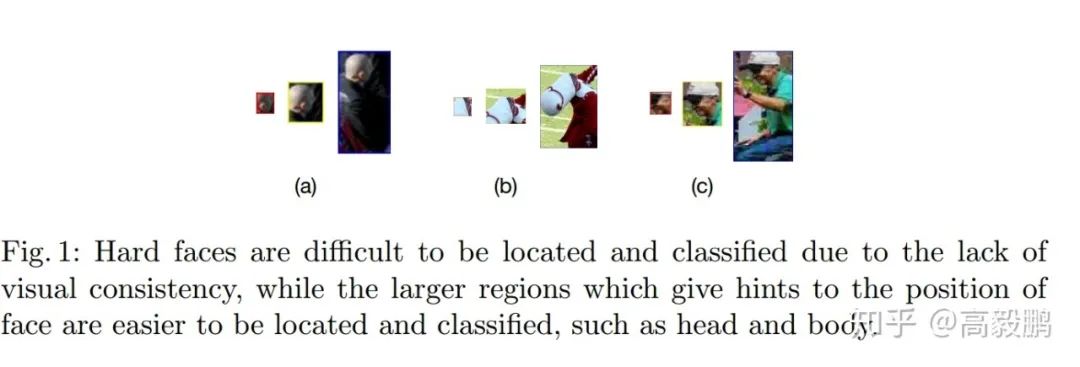
利用上下文信息,或者目标之间建立联系
class CPM(nn.Module):
"""docstring for CPM"""
def __init__(self, in_plane):
super(CPM, self).__init__()
self.branch1 = conv_bn(in_plane, 1024, 1, 1, 0)
self.branch2a = conv_bn(in_plane, 256, 1, 1, 0)
self.branch2b = conv_bn(256, 256, 3, 1, 1)
self.branch2c = conv_bn(256, 1024, 1, 1, 0)
self.ssh_1 = nn.Conv2d(1024, 256, kernel_size=3, stride=1, padding=1)
self.ssh_dimred = nn.Conv2d(
1024, 128, kernel_size=3, stride=1, padding=1)
self.ssh_2 = nn.Conv2d(128, 128, kernel_size=3, stride=1, padding=1)
self.ssh_3a = nn.Conv2d(128, 128, kernel_size=3, stride=1, padding=1)
self.ssh_3b = nn.Conv2d(128, 128, kernel_size=3, stride=1, padding=1)
def forward(self, x):
out_residual = self.branch1(x)
x = F.relu(self.branch2a(x), inplace=True)
x = F.relu(self.branch2b(x), inplace=True)
x = self.branch2c(x)
rescomb = F.relu(x + out_residual, inplace=True)
ssh1 = self.ssh_1(rescomb)
ssh_dimred = F.relu(self.ssh_dimred(rescomb), inplace=True)
ssh_2 = self.ssh_2(ssh_dimred)
ssh_3a = F.relu(self.ssh_3a(ssh_dimred), inplace=True)
ssh_3b = self.ssh_3b(ssh_3a)
ssh_out = torch.cat([ssh1, ssh_2, ssh_3b], dim=1)
ssh_out = F.relu(ssh_out, inplace=True)
return ssh_out
class BasicRFB(nn.Module):
def __init__(self, in_planes, out_planes, stride=1, scale=0.1, map_reduce=8, vision=1, groups=1):
super(BasicRFB, self).__init__()
self.scale = scale
self.out_channels = out_planes
inter_planes = in_planes // map_reduce
self.branch0 = nn.Sequential(
BasicConv(in_planes, inter_planes, kernel_size=1, stride=1, groups=groups, relu=False),
BasicConv(inter_planes, 2 * inter_planes, kernel_size=(3, 3), stride=stride, padding=(1, 1), groups=groups),
BasicConv(2 * inter_planes, 2 * inter_planes, kernel_size=3, stride=1, padding=vision + 1, dilation=vision + 1, relu=False, groups=groups)
)
self.branch1 = nn.Sequential(
BasicConv(in_planes, inter_planes, kernel_size=1, stride=1, groups=groups, relu=False),
BasicConv(inter_planes, 2 * inter_planes, kernel_size=(3, 3), stride=stride, padding=(1, 1), groups=groups),
BasicConv(2 * inter_planes, 2 * inter_planes, kernel_size=3, stride=1, padding=vision + 2, dilation=vision + 2, relu=False, groups=groups)
)
self.branch2 = nn.Sequential(
BasicConv(in_planes, inter_planes, kernel_size=1, stride=1, groups=groups, relu=False),
BasicConv(inter_planes, (inter_planes // 2) * 3, kernel_size=3, stride=1, padding=1, groups=groups),
BasicConv((inter_planes // 2) * 3, 2 * inter_planes, kernel_size=3, stride=stride, padding=1, groups=groups),
BasicConv(2 * inter_planes, 2 * inter_planes, kernel_size=3, stride=1, padding=vision + 4, dilation=vision + 4, relu=False, groups=groups)
)
self.ConvLinear = BasicConv(6 * inter_planes, out_planes, kernel_size=1, stride=1, relu=False)
self.shortcut = BasicConv(in_planes, out_planes, kernel_size=1, stride=stride, relu=False)
self.relu = nn.ReLU(inplace=False)
def forward(self, x):
x0 = self.branch0(x)
x1 = self.branch1(x)
x2 = self.branch2(x)
out = torch.cat((x0, x1, x2), 1)
out = self.ConvLinear(out)
short = self.shortcut(x)
out = out * self.scale + short
out = self.relu(out)
return out
两阶段检测小技巧:ROI pooling被ROI align替换
GAN
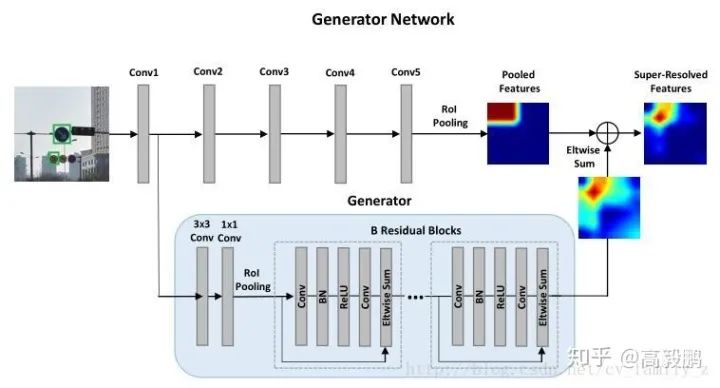
提升图像分辨率
参考:
[1]小目标检测中的数据扩展(Augmentation for small object detection): https://blog.csdn.net/abrams90/article/details/89371797
[2]深度学习笔记(十)Augmentation for small object detection(翻译): https://www.cnblogs.com/xuanyuyt/p/11328548.html
[3][FPN]([Feature Pyramid Networks for Object Detection: https://link.zhihu.com/?target=https%3A//arxiv.org/abs/1612.03144
[4]PyramidBox]([PyramidBox: A Context-assisted Single Shot Face Detector: https://link.zhihu.com/?target=https%3A//arxiv.org/abs/1803.07737
[5]Relation Networks]([Relation Networks for Object Detection: https://link.zhihu.com/?target=https%3A//arxiv.org/abs/1711.11575
[6]Jarvix贾博士:ROI Pooling和ROI Align: https://zhuanlan.zhihu.com/p/73138740
[7]目标检测“Perceptual Generative Adversarial Networks for Small Object Detection”: https://blog.csdn.net/c2a2o2/article/details/78619614
重磅!CVer-目标检测 微信交流群已成立
扫码添加CVer助手,可申请加入CVer-目标检测 微信交流群,目前已汇集3800人!涵盖2D/3D目标检测、小目标检测、遥感目标检测等。互相交流,一起进步!
同时也可申请加入CVer大群和细分方向技术群,细分方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch和TensorFlow等群。
一定要备注:研究方向+地点+学校/公司+昵称(如目标检测+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群

▲长按加群

▲长按关注我们
麻烦给我一个在看!


