无人车高精度定位的研究现状与发展
点击上方“公众号”可以订阅哦!
电子科技大学 冯黎、郭承军
1 引言
近年来,无人驾驶技术得到了迅猛的发展。如何实现高精度行车定位是实现大规模无人驾驶的一大障碍。目前,全球定位系统(GPS)的定位技术是使用最广泛的车辆定位手段,然而无人车在城市环境中, GPS多路径反射的问题会很明显。这样得到的GPS定位信息很容易就有误差。对于在有限宽度高速行驶的汽车来说,这样的误差很有可能导致交通事故。差分GPS(DGPS)利用GPS伪距码可以达到1-2米的精度,但这还远远的精度要求。惯性导航系统(INS)在GPS信号衰减或信号丢失时经常被用来定位车辆,但极易产生累积误差。为了实现无人驾驶车道级的定位需求,利用多定位源进行辅助定位是研究热点。本文从车载传感器和射频信号等定位源,综述了现有满足车道级定位需求的各种定位手段,指出了各种定位源优缺点,并讨论了无人车高精度定位的未来发展。
2 无人车高精度定位现状
目前,主要使用有GNSS信号、车载传感器信号和射频信号等定位信号源。GPS能提供全局环境的定位,是具有当前无人车定位不可或缺的技术。INS具有短期定位精度与数据采样频率较高的特点,为GPS系统提供相关辅助信息。然而由于无人驾驶对可靠性和安全性要求非常高,在复杂的环境中,基于GPS和惯性传感器的定位并不能实现车道级的高精度定位,因此常常需要结合其他定位方式。
2.1 基于RTK的定位方法
RTK是利用载波相位差分进行实时动态相对定位的技术。基准站将观测数据通过通信链路传送到附近的若干移动站接收机。移动站通过接收的数据、基准站的位置和采集的GPS观测数据进行载波相位差分定位。从而求得精确的位置信息。当基准站只有一个时为单基站差分GPS系统。当有多个基准站时,即为多基准站差分GPS系统,也称为网络RTK(NRTK,Network RTK)。
2016年5月,基于我国自主建设的北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)的千寻北斗地基增强网络开始向用户提供高精度定位服务。该服务基于RTK的差分定位原理,依托遍布全国的卫星定位地基增强站,融合各类定位技术,以互联网的方式提供全天候高可用的差分播发服务。黄永帅等人在武汉、重庆两地分别对千寻北斗地基增强网络的RTK定位服务进行了性能测试。结果表明,其定位性能能够达到实时RTK厘米级。
2.2 基于车载传感器的定位方法
车载传感器一般包括GPS/IMU、激光雷达、相机和微波雷达。
2.2.1 基于视觉定位方法
Julius Ziegler等人利用视觉检测车道线和类似道路,然后再基于精确的地图进行相对定位。 他们开发的无人车Bertha经过实测,在精度方面能与能实现车道级的定位精度。 Gerrit Bagschik等人也提出了使用车道级地图进行地图相对定位的方法。这些方法均需要预先建立精准的地图,同时地图还需不断的更新。Dayang Nur等人利用传统的单目视觉测距系统与GPS融合结合Open Street Map地图提供的道路信息确定每个车道的概率因子,从而实现了车道级的定位。
在无地图的定位方案方面中,视觉里程计(visual odometry)是目前研究的热点。视觉里程计是以单个或多个摄像机在运动过程中釆集的图像为输入信息来估计摄像机旋转和平移运动的定位方法。视觉里程计分为双目和单目这两种。单目视觉里程计自身由于无法推算出所观察物体的尺度信息,而需借助先验信息或来自其他传感器的的结合去进行准确的定位。双目视觉里程计通过左右图像的三角化计算出特征点的深度值,然后从深度信息中推算出物体的大小。双目视觉里程计的具体计算流程如图1。
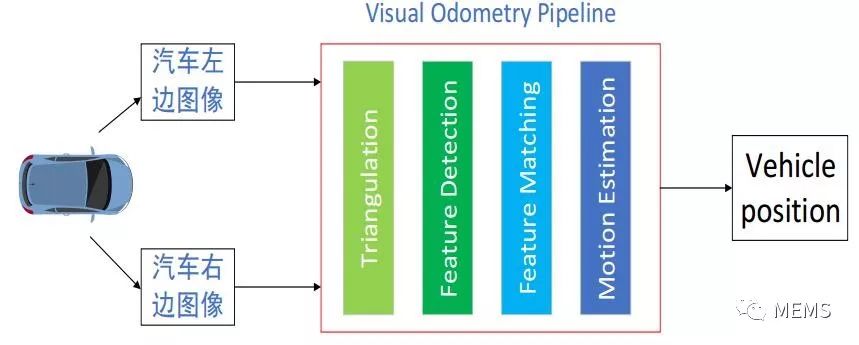
图1 双目视觉里程计的具体计算流程
张高明采用SURF特征描述子,基于快速近似最近邻(FLANN)算法进行前后帧的匹配,基于RANSAC算法对匹配对集合进行有效性筛选,并依据三角化方法估计匹配点对的三维坐标,最后,基于P3P算法由匹配对估计前后帧的相对运动。从而实现了基于视觉里程计的自定位。
SLAM起源于机器人领域,SLAM问题可以描述为:机器人在未知的环境中进行移动,在移动的过程中根据位置估计和传感器数据进行定位,同时创建增量式的地图,目前,基于视觉的同时定位与地图构建技术(V-SLAM)迅速发展。同时也为无人车利用视觉同时定位与地图构建奠定了基础。
2.2.2 基于激光雷达点云数据与高精地图匹配方法
激光雷达(LiDAR)一般由激光光源发射机、光学接收设备、信息处理系统等部分组成。电脉冲通过激光光源发射器转变为光脉冲发射,光学接收设备将目标反射来的光波信息转变为电脉量。通过从接收到反射的时间差来测量距离目标的距离,在结合激光发射的角度推导出位置信息。在无人车行车的过程中,激光雷达以一定的频率匀速转动,在这个过程中不断地发出激光并收集反射点的信息,每旋转一周收集到的所有反射点坐标的集合就称为点云(point cloud),点云信息就反映了车辆的全方位的环境信息。预先通过激光雷达采集点云信息,制作成高精地图,当无人车再次进入该环境时,通过点云信息的分析和匹配,即可实现高精度的定位。
王静等人结合具有三维激光扫描和全景数据采集功能的移动测量车采集的相关道路数据,从这些数据中提取了车道数、车道宽等属性数据,制作了基于点云的车道级道路电子地图。Markus Schreier通过使用64线激光雷达和广角摄像头结合的方法提取道路信息加上配备的高精度GNSS能够达到10cm精度。
2.3 基于射频信号定位方法
射频识别(Radio Frequency Identification, RFID),是一种利用射频信号自动识别目标对象并获取相关信息的技术。RFID具有的非接触、非视距和成本低等优点。RFID主要包括标签、读写器和天线等部分。将RFID技术应用到定位系统中,可以显著提高定位系统的精度。加利福尼亚大学的Eun-Kyu Lee等人提出了一个采用RFID技术的定位系统RF-GPS,该系统采用差分GPS和路边单元上的RFID标签获得车道级精度的位置数据,当GPS不可用或非GPS车辆遇到具有准确位置数据的车辆时,它们通过RFID和无线网路交换位置和行驶信息,来获取准确的位置信息。湖南大学的C. Zheng等人提出了一种基于RFID和视觉的新型定位系统。在这个系统中,通过基于RFID与视觉的车道判断的方法判断车辆占用的特定车道(即横向位置),在车道判断的支持下,可以通过GPS / DGPS或V-I通信和测距实现车道级定位。
2.4 多源融合定位方法
上述的各种定位方法虽各有优势,但也存在各自的局限。基于射频信号的定位方式中,信号受多径效应和定位环境的影响而产生误差,区域布置RFID参考标签的拓扑结构及密度也直接影响了定位的精度。实时动态(RTK)载波相位信息在复杂的动态环境中容易信号退化或信号丢失,只能在很短的时间内达到高精度。基于视觉的定位方式易受光照环境和运动速度影响。基于激光雷达的定位方式价格较为昂贵,成本较高。为了满足无人驾驶对可靠性和安全性的高要求,多源融合定位成为了现在研究的热点。目前,融合方法主要分为松耦合和紧耦合。其中松耦合常用的方法是先由各自不同的传感器得到定位结果,然后对各定位结果进行信息融合。紧耦合是根据各类传感器得到的不同类型的观测参量进行融合。多源融合定位于其精度上优于单一定位源,具备更好的鲁棒性以及可靠性。为了实现车道级的定位精度,通常在无人车行车环境中,寻求多定位源并进行多源融合。 目前主流的无人车融合定位方案如图2。
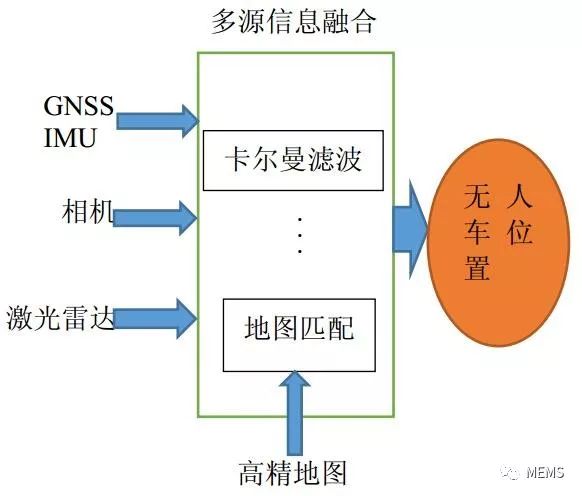
图2 无人车融合定位方案
3 无人车高精度定位发展趋势
目前,Google公司的无人驾驶汽车已经进行了上路测试, Baidu公司也于2017年4月开放了自动驾驶平台Apollo,同时百度将与金龙汽车合作生产一款无人驾驶小巴车,在2018年7月份左右量产。无人车的高精度定位作为无人驾驶技术核心技术之一,已经日趋成熟。在无人车行车环境中,探索新的定位源是未来发展方向之一。
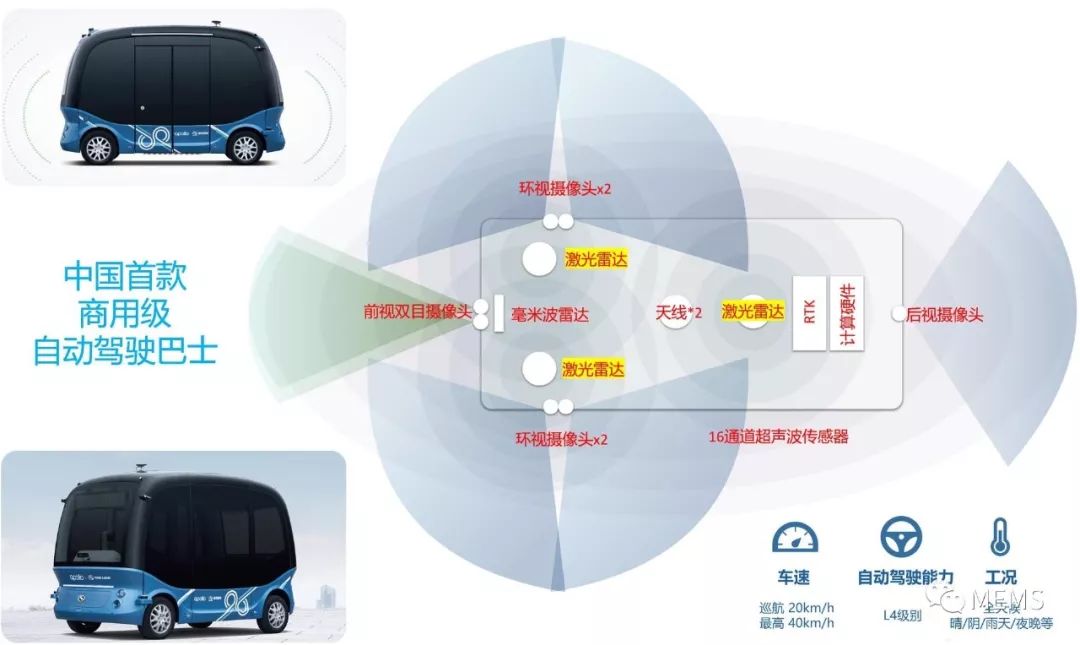
百度和金龙合作生产自动驾驶巴士:阿波龙
注:投稿请电邮至124239956@qq.com ,合作 或 加入未来产业促进会请加:www13923462501 微信号或者扫描下面二维码:

文章版权归原作者所有。如涉及作品版权问题,请与我们联系,我们将删除内容或协商版权问题!联系QQ:124239956





