Blippar发布AR导航应用,UVP定位系统


机器通过计算机视觉认识世界,运用人工智能理解世界,最后通过AR的形式反馈给人类,CV、AI、AR三者本就密不可分,他们共同构建了连接真实世界和虚拟世界的桥梁。
AR地图要成为广大路痴的大救星,就必须完美地整合这三者,缺一不可。
而这正是英国的增强现实企业Blippar正在做的。

城市视觉定位系统(Urban Visual positioning)
Blippar创立于2011年,总部位于英国伦敦,他们早先的产品大都和图像识别相关。
最初他们只是对静态图片进行识别,比如扫描到可口可乐、星巴克等商标的时候和他们数据库中的图片匹配,得到识别结果。
2014年他们将技术团队搬到了美国加州,目的是专注于AI的自我学习,让计算机识别理解更复杂的事物。

Blippar的旗舰产品blippar浏览器是他们推出的一款图片识别增强现实应用。
近日,Blippar发布了一款名为AR City的AR导航APP。

起点看不懂,转向难辨认,目的地难找等问题是传统地图APP的常见使用问题,二维的地图和三维的实景之间存在着认知的障碍,AR则是突破次元的好工具。
不过AR导航的概念并不新鲜,国内外已经有了不少相关产品。

“随便走”,采用识别关键字标签+摄像头传感器+直观箭头指引,为用户指明方向。
各大导航地图APP也都在逐渐完善AR导航功能。
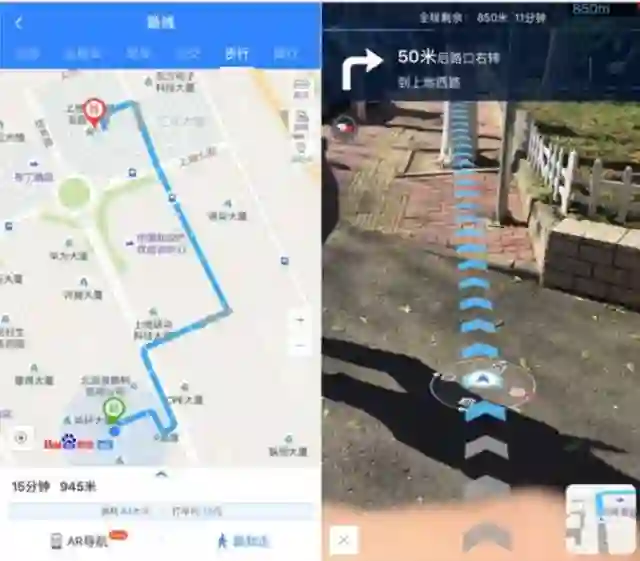
百度地图已经加入了步行AR导航。
上述这两种的原理都很简单,都是传统的手机定位结合相机、陀螺仪,在相机上叠加上目标方向箭头,而到底你身处室内还是室外,路上有些什么需要注意的,他们是无法顾及的。
Blippar的AR导航地图势必要有点不一样。
城市视觉定位:

GPS的定位精度已经被我们诟病过多次,十几米的误差在AR时代真的有点大,为了打造用户体验良好的AR导航,定位需要精度高,速度快。
Blippar宣称,他们的城市视觉定位系统(UVP),比GPS提供的定位精度要精确两倍以上,误差仅为几米,并且不会出现类似GPS信号问题导致的定位差错。
UVP的实现原理的核心在于计算机视觉。
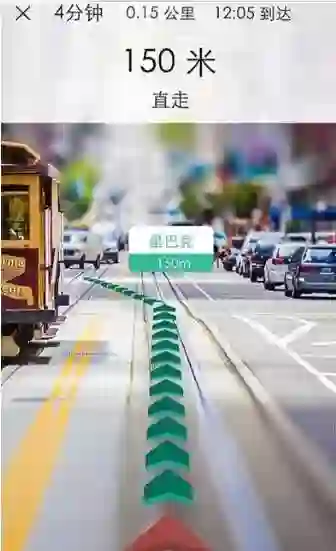
从演示视频来看,AR City的定位速度极快,几乎可以瞬时完成。
这其中的奥秘在于Blippar整合了ARkit VIO和GPS。
VIO这个概念我们介绍过几次,Google的VPS定位系统采用的就是这项技术。
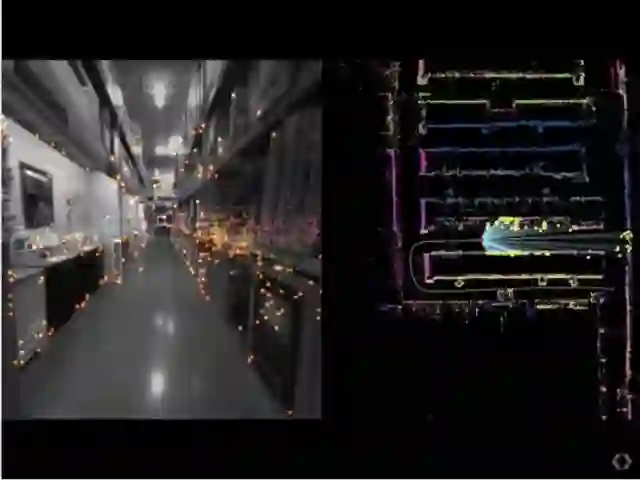
在图像的特征点提取匹配的基础上加上IMU,将里程计、光流和惯导做数据融合,实现更高精度的定位。利用类似于Google街景数据库的可视化数据,根据用户对周围环境的识别来确定用户的坐标位置。 从潜艇定位到谷歌VPS都离不开的VIO
AR City能够实现对环境的识别,在导航方面的准确度也就会更理想。

建筑物的名称,街边商铺的店名、评价、评分都会显示在地图上,ARKit的帮助下箭头也能更贴近道路的实际。
目前UVP系统还仅支持旧金山、伦敦市中心使用,除去此功能之外的AR导航目前已经支持全球三百多个城市。也不难理解,UVP系统的构建需要类似谷歌街景车采集街景,完善数据库,这不是一个短期能够完成的任务。
目前AR City仍然是一个beta版,不过他已经指明了一个可行的方向,并且势必会对许多行业和市场带来改变。
不过按照惯例,入华阻力应该不小。希望国内的企业能够跟上,本路痴已经迫不及待等着被拯救了。

阅读推荐