研究发现头部转动可以灵活地抑制视觉运动后效
大多数视觉相关的心理学实验会要求受试者静坐在显示器前,保持头部固定,看着屏幕上的视觉刺激完成实验任务。然而在实际生活中,人们观察这个世界时,自身却常常处于运动的状态。因此,传统的心理物理方法对于研究自身运动(例如头动)下的视觉加工存在着局限。为了研究自身运动对视觉加工的影响,以往的研究者们常使用机械装置,例如让受试者坐在机械平台上,在平台进行转动或平动时完成视觉任务。但是机械装置一般造价昂贵,体积较大,也较为沉重,缺乏便携性,不易用来研究观察者主动运动(locomotion)时的视觉加工,而且机械装置使用时往往需要精密的矫正,这些都给研究带来一些不便和限制。
中国科学院心理研究所行为科学重点实验室设计了一种轻便的虚拟现实方法(图1a),通过固定在虚拟现实头盔上的三维传感器实时读取观察者头部的三维空间朝向信息,并结合这些信息呈现实验指定的视觉运动刺激。这样可以便捷、系统和定量地研究头动情况下的视觉加工。该研究工作由行为科学重点实验室的鲍敏、张弢、蒋毅研究组合作完成,第一作者白建迎曾在这三个研究组担任联合研究助理。
作为检验和使用该方法的首个研究,实验主要关注水平方向的头部转动如何影响视觉运动后效。视觉运动后效是一种常见的视错觉。当观察者盯着朝着固定方向运动的光栅一段时间后,立即观看一个物理上静止的光栅,观察者会错误地知觉到光栅在朝着之前运动光栅相反的方向运动。随着时间的推移,这种错觉会慢慢地消失,错觉持续时间的长短反映了运动适应效应的强弱。
实验一包括头动和头静止两个条件。如图1b所示,在头动条件下,每当观察者头朝右转动,屏幕的上视野会呈现一个往左运动的光栅,其运动速度和三维传感器测得的头动速度一致。而当观察者头朝左转动时,屏幕的下视野会呈现一个往右运动的光栅。这样,观察者左右来回转头,便一直接受到与头动方向相反的视觉运动的刺激输入。这种视网膜运动信号在速度和方向上类似于日常生活中人们作水平方向头部转动时,周围的世界在视网膜上留下的光流。待适应结束时,立即给观察者呈现一个覆盖上下视野适应位置的静止光栅,观察者会错觉到光栅的上半部分往右漂动,下半部分往左漂动,适应后效的时长通过按键反应记录。在头静止条件下,观察者保持头部静止,观看头动条件时的视觉运动刺激的回放,同样在适应结束后记录适应后效的时长。结果发现,头动条件相比于头静止条件,视觉运动适应后效显著地缩短了(图2)。
有意思的是,在实验二和实验三中,研究者将头动引起的视觉光栅的运动方向变为竖直方向(图1b)或者与头动方向相同(图1c,即与日常生活的情形相反),结果仍然发现头动缩短了视觉运动适应后效。所以,头动对运动适应后效的抑制并不局限于人们日常生活中头动方向与视网膜运动信号方向的自然匹配关系,而是具有相当的灵活性。进一步的实验四发现,这种头动导致的适应后效的抑制取决于头动信号与视觉运动信号的因果关系,一旦视网膜运动信号的速度和方向被随机化,使得视觉运动刺激看起来并不是由头动引起的,该抑制效应就消失了。
这种抑制现象的一个可能的解释是突触可塑性的赫布理论(Hebb, 1949)。以实验二为例,由于往下运动的视网膜信号总是与观察者朝左转头相关联,编码向下运动的视觉神经元的活动模式便与编码向左转头的前庭觉神经元和本体觉神经元的活动模式在时间上表现为一致重叠。赫布学习理论预测连接这两群神经元的突触会得以增强。以至于神经系统会把向下运动的视觉运动信号解释为由向左转头导致的。因为这种视觉运动信号是可以由自身运动信号预测的,神经系统便会抑制该视觉运动信号,以便更有效地加工环境中真正运动的物体的视觉信号,而不是去过多地加工这种由自身运动引发的不太有意义的视觉运动信号(Mial & Wolpert, 1996)。
该研究受国家自然科学基金(31571112, 31371030, 31271175和31525011)、中科院前沿科学重点研究项目(QYZDB-SSW-SMC030)和中科院战略性先导科技专项(XDB02010003)资助。研究结果在线发表于 Behavior Research Methods。
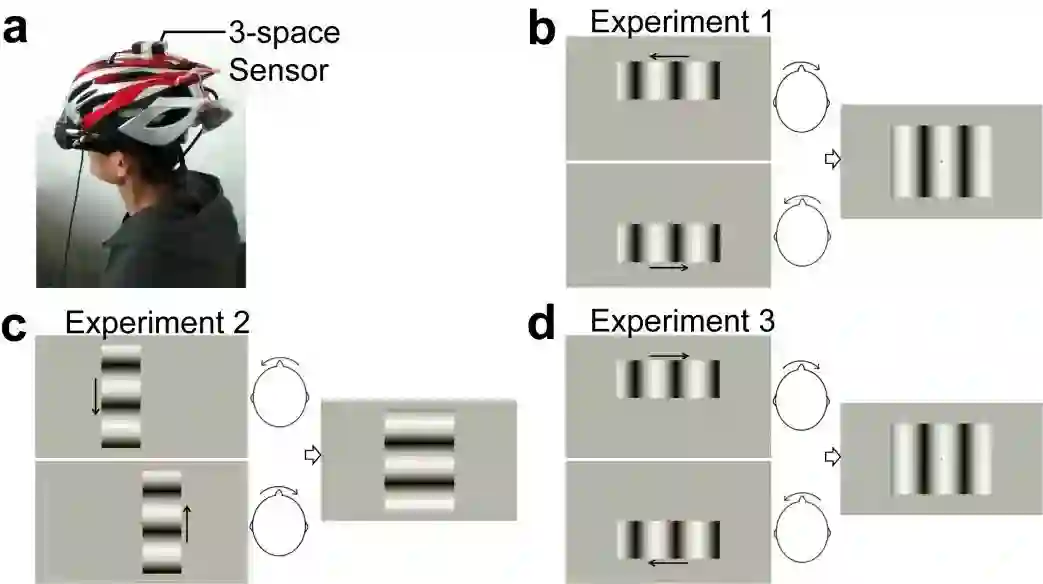
图1 实验装置图及刺激范式示意图
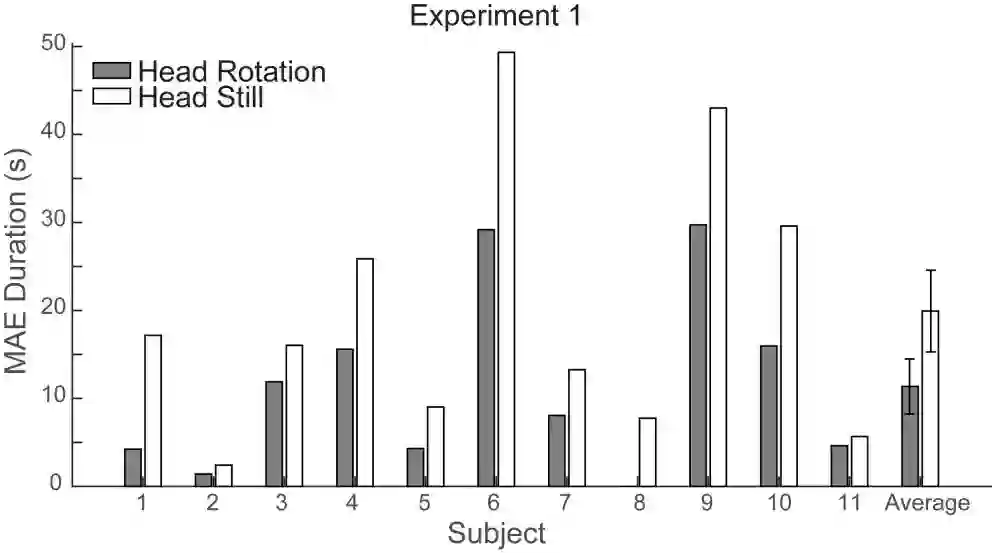
图2 实验一结果,视觉运动适应后效(MAE)在头静止条件下比头动条件下明显更持久。
来源:中国科学院心理研究所