![]()
Pooling Architecture Search for Graph Classification
https://arxiv.org/abs/2108.10587
https://github.com/AutoML-Research/PAS
备注:该论文已经被数据挖掘会议 CIKM 2021 接收,欢迎大家关注。如有任何问题,欢迎联系 weilanning@ict.ac.cn。
![]()
近年来 GNN(Graph Neural Network)成为工业界和学术界非常热门的一个研究方向。在图分类任务中,不同的池化操作应用在了 graph-level 的特征学习中。但是面对多样的数据集和任务,没有任何一个方法能够稳定取得 SOTA 效果。最近,斯坦福大学 Jure 教授团队在 NeurIPS 2020 的工作上也指出了这一点
[1]
。
基于此,我们结合自动化机器学习(AutoML)
[2-5]
来获取任务自适应的池化图神经网络。具体来说,我们提出了一个基于图分类任务的统一框架,并在此基础上设计了新的搜索空间(search space)。为效率起见,我们提出了一个 coarsening strategy 来解决池化操作的松弛问题,从而可微搜索算法(differentiable search algorithm)可以被应用到池化结构搜索中。我们的池化结构搜索方法(Pooling Architecture Search,简记为 PAS)能够在取得 SOTA 表现的同时还十分高效。
![]()
图分类任务有大量的应用场景,比如蛋白质/化学分子性质预测
[6]
,社交网络分析
[7],文档分类 [8] 等,如图 1 所示。
相比较于 node-level 的任务,图分类任务需要学习 graph-level 的特征表示,池化操作也由此被提出。一个简单直接的方案就是取所有节点的的特征均值或者和,这类操作被称为全局池化操作(global pooling);这类操作学到的是单层次的 graph-level 特征,无法捕获图结构中的层次化信息。层次化的池化(hierarchical pooling)方案就是为了解决这个问题,它通过生成越来越粗粒度的图来提取层次化的 graph-level 信息。
现有的图分类方案提供了不同的 global 和 hierarchical 的池化方案,比如 DGCNN
[10]
,DiffPool
[11]
,SAGPool
[12]
,ASAP
[13]
,Graph U-Net
[14]
等。现有的 GNN 结合神经网络结构搜索(neural architecture search,简记为NAS)的方案,都是专注于 node-level 的工作,比如 GraphNAS [15], SNAG
[16]
,SANE
[17]
等,缺少 graph-level 的探索,方案
[18]
考虑了 global pooling 的设计,但是它基于演化算法(Evolutionary algorithm,简记为 EA),耗时长效率低。这些方案缺少了对池化结构的重要部分的探索,即缺少对 hierarchical pooling 的设计。基于上述,如何能快速高效的设计数据自适应的图分类任务 GNN 是一个大的挑战。
为了解决上述的问题,我们提出了新的解决方案 PAS(Pooling architecture search),其中包括一个统一框架,基于该框架的设计的搜索空间,以及考虑到效率而设计的 coarsening strategy。
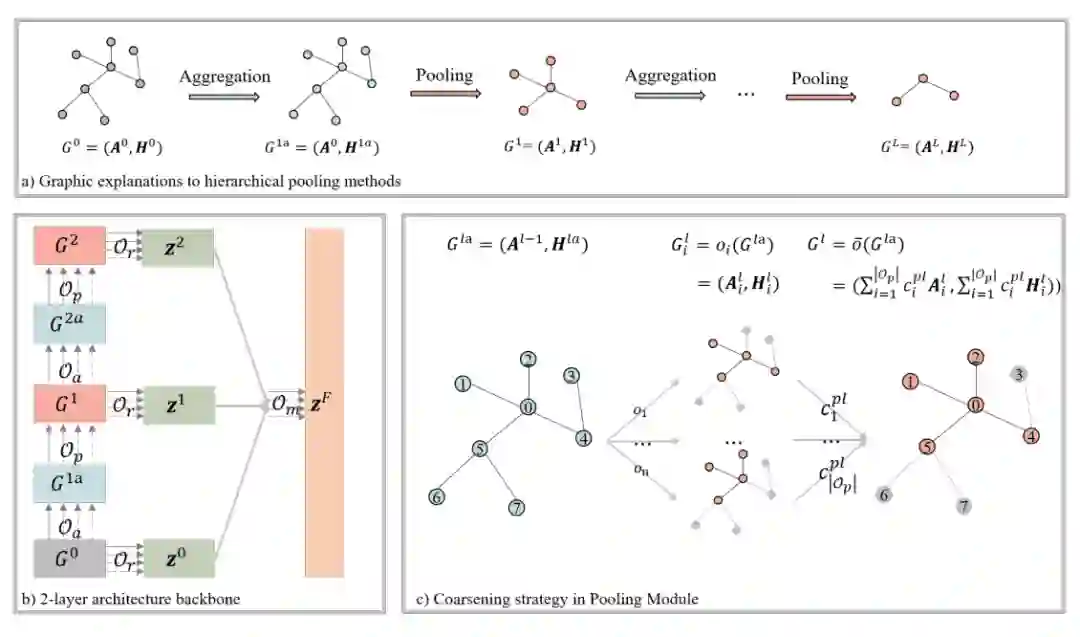
从现有的图分类 GNN 中,我们提取了四个重要的模块,聚合模块(Aggregation Module),池化模块(Pooling Module),读出模块(Readout Module)和融合模块(Merge Module)。以图 1(b)的两层结构为例,针对输入的图
,聚合模块更新了节点自身信息,结果可以表示为
,随后池化模块产生粗粒度的图
。
这两个操作的示意图展示在(a)中,第二层的聚合模块和池化模块也是同样的操作。三个读出模块用来读出每一层的 graph-level 特征
,最后聚合模块基于生成的特征
生成最终的 graph-level 特征
。
![]()
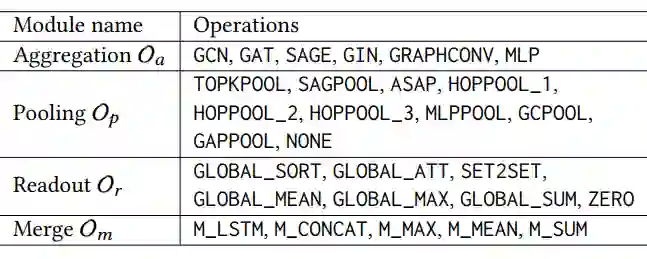
基于这个统一框架,我们提出了一个 NAS 方案来搜索池化结构。按照 NAS 的一贯设计,我们给出了搜索空间中各个模块的操作集合,如表 1 所示。
![]()
在本文中,池化操作的过程可以被统一为如下公式。其中
存储着节点的得分,由打分函数
得到,之后
函数选择出分数排名前
的节点。粗粒度图的邻接矩阵
和节点特征矩阵
可以按照对应公式采样得到。基于这个公式,我们提供了 10 种池化操作,详情请见论文。
![]()
可微搜索算法中,一项重要的设计就是松弛函数。如下所示,离散空间可以被松弛为连续空间,其中
是集合
中第
个操作
的权重。
![]()
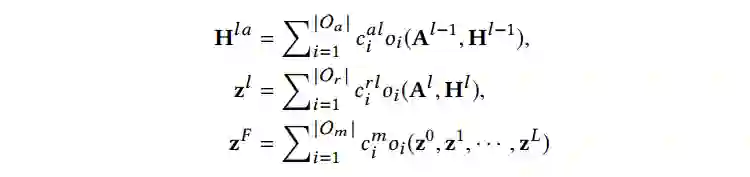
基于这个松弛函数,聚合模块、读出模块和融合模块的结果可以按照如下公式计算。
![]()
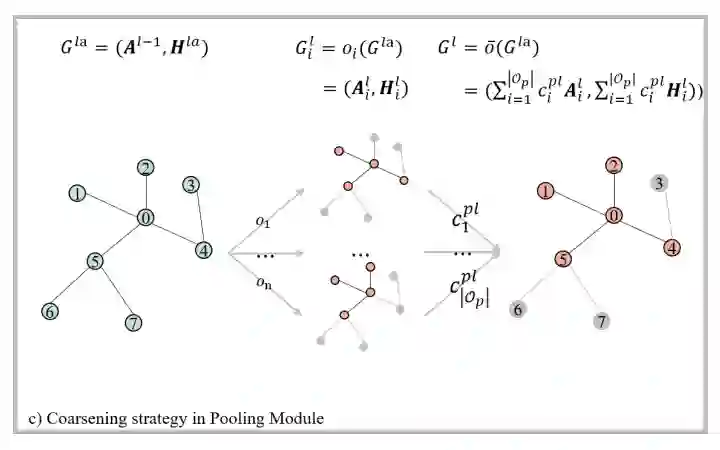
但是这对池化操作来说是不可实现的,如下图所示,池化操作
和
产生了不同的节点集合
和
,此时粗粒度图中的特征矩阵都是
,虽然具有相同的矩阵大小,但是因为节点集合不匹配所以无法直接加权求和。
我们设计了新的 coarsening strategy 来解决这个问题,在产生了候选的
个节点后,那些没有选中部分记为 0。也就是说,下图中未被选中的节点(灰色节点)特征为 0,未被选中的边(灰色的边)权重为 0。当前策略下生成的粗粒度图,具有和输入图一样的“形状”,因此池化模块的结果可以按照下述公式计算。
![]()
![]()
在设计的 coarsening strategy 基础上,整个框架可以用梯度下降来优化。搜索完成后,取出每个模块中权重最大的操作,基于此我们可以得到搜索的池化结构。
![]()
![]()
![]()
![]()
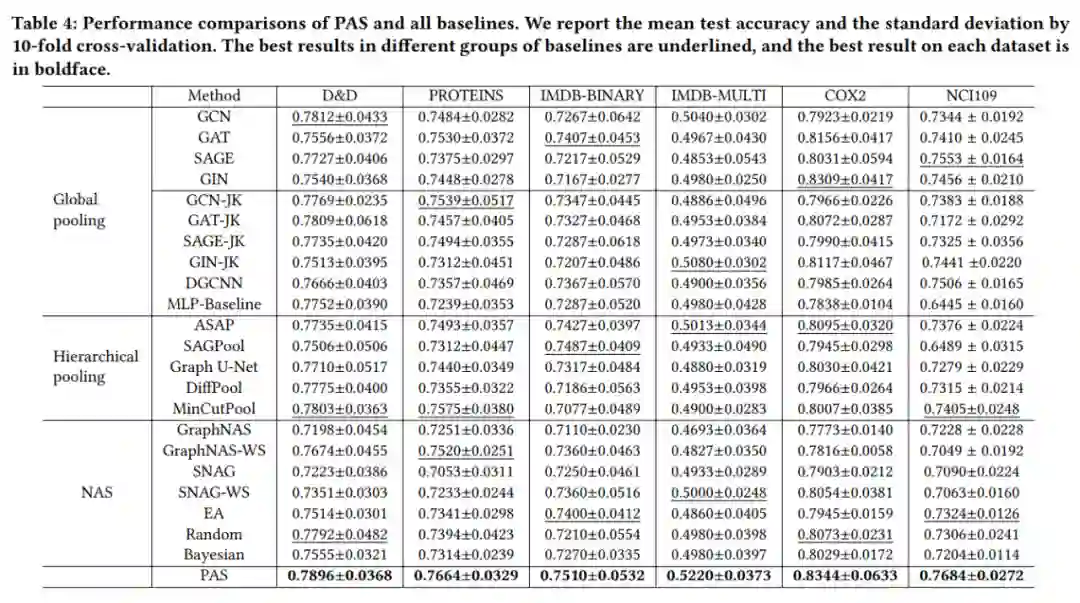
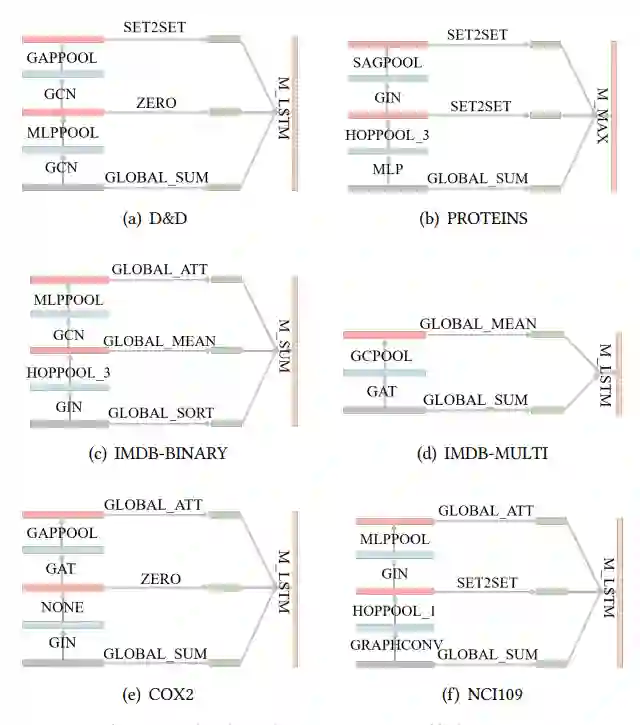
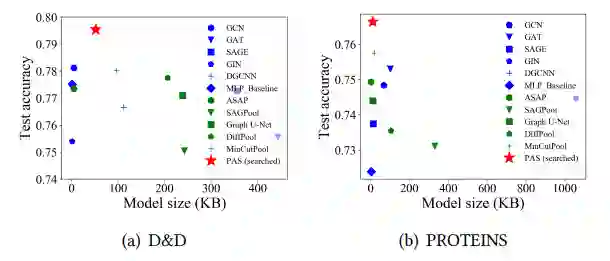
如表 2 所示,PAS 比现有的两类池化方案和 NAS 方案的效果更好,这也体现了我们提出的方案的有效性。搜索出的 GNN 结构如图 4 所示,不同数据集上的结构各不相同,并且在 COX2 数据集上,搜索的 GNN 退化为一个 global pooling 的方案。图 5 中展示了测试集上准确率和模型参数的对比,PAS 搜索出来的结构能够用更少的参数获得更高的结果。综合这些实验结果,PAS 的效率和效果是显而易见的。
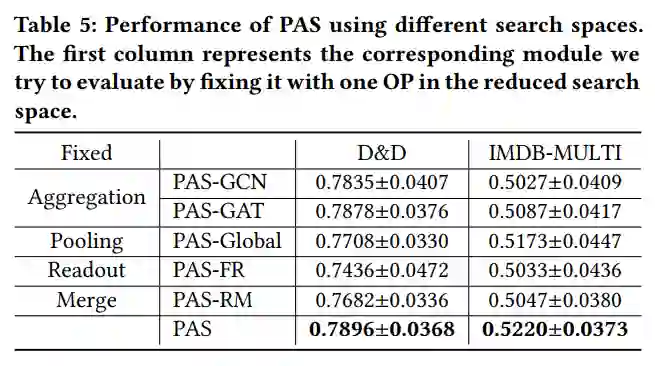
针对 PAS 的四个模块,我们设计了对应的消融实验来验证四个模块的重要性。如表 3 所示,这些方案的效果低于 PA 本身,这展示了我们设计的统一框架的有效性。
![]()
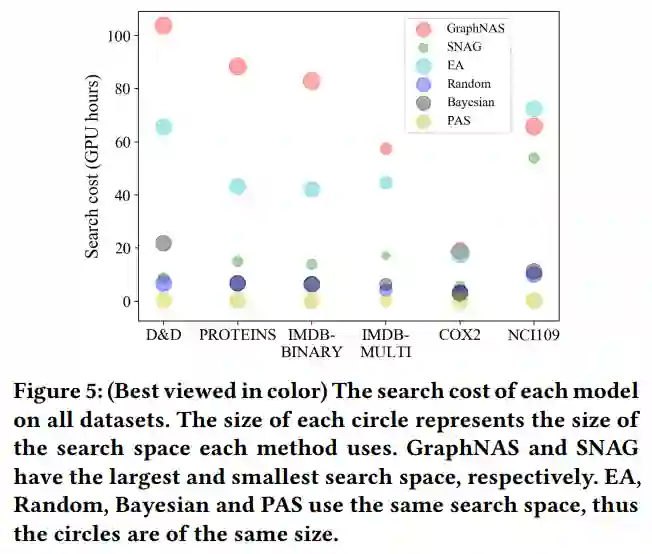
如下图所示,我们对比了不同方案的搜索空间大小和搜索耗时。圆圈大小代表了搜索空间的大小,不同颜色代表了不同方案。PAS 的搜索空间大小介于 GraphNAS 和 SNAG 之间,但是具有最小的搜索耗时和最高的效果。结合图 5,PAS 的高效性显而易见。
![]()
![]()
本文提出了一种自动设计池化结构的方案 PAS。PAS 中包含一个新的统一框架,它由四个常用的模块组成。在此基础上,我们提供了对应的搜索空间并设计了 coarsening strategy 来松弛这个搜索空间。基于此,可微搜索这种高效的搜索算法能被应用到池化结构搜索中。我们设计了充分的实验来验证搜索空间和搜索算法这两部分,结果显示 PAS 比现有的方案结果更好效率更高。
本文探索了 NAS 在图分类任务中的应用,除此之外,本组还有以下新工作:
AutoSF: Searching scoring functions for knowledge graph embedding. ICDE 2020. (AutoSF)
Interstellar: Searching Recurrent Architecture for Knowledge Graph Embedding. NeurIPS 2020. (Interstellar)
Search to aggregate neighborhood for graph neural network. ICDE 2021. (SANE)
Simplifying Architecture Search for Graph Neural Network. CIKM-CSSA 2020 (SNAG)
Searching to Sparsify Tensor Decomposition for N-ary relational data. WWW 2021. (S2S)
DiffMG: Differentiable Meta Graph Search for Heterogeneous Graph Neural Networks. KDD 2021. (DiffMG)
-
TabGNN: Multiplex Graph Neural Network for Tabular Data Prediction. KDD-DLP 2021. (TabGNN)
在未来的工作中,我们打算结合本组的工作 SANE 和 SNAG,加强 PAS 中对聚合操作的探索,并打算深入探索搜索出来的 GNN 和图性质之间的关系,同时尝试将 PAS 应用在更大的图数据集中,比如 OGB。