ORB-SLAM2 | 回环&DBoW视觉词袋
点击“计算机视觉life”关注,置顶更快接收消息!
本文经知乎作者杨小东授权转载,二次转载请联系作者
原文:https://zhuanlan.zhihu.com/p/61850005
回环检测是SLAM中有效降低全局误差,构建全局一致地图的关键模块。跟踪丢失的时候,还可用于重定位。根据综述文献[1],检测回环的方法有image-to-image, map-to-map, image-to-map三种方法。相比之下,image-to-image方法,也称为appearance-based基于外观的方法,具有更好的大场景适应性。现阶段,在image-to-image的方法中,常用的方法是基于视觉词袋方法(Bag of visual words)。针对BRIEF特征,文献[2]提出了词袋方法:DBoW2方法。之后又推出了改进版DBoW3。本文对DBoW,以及DBoW在ORB-SLAM中的使用细节进行了总结。
0. 回环的评价指标
对于一个回环的结果,可能有下面四种情况出现。

把一种回环检测算法在一个大的数据集上测试,四种结果的数量分别为 





准确率描述的是检测到是回环的结果里面有多少是真的回环。在SLAM中,我们对这个指标要求很高,宁缺毋滥。错误的回环会对SLAM系统带来灾难性的后果。在检测到回环之后,一般还需要经过各种校验,才会接收这次回环。
召回率描述的是所有实际的回环中,我们能检测出多少个回环。当然这指标也是越多越好,但是实际上准确率和召回率往往是矛盾的。
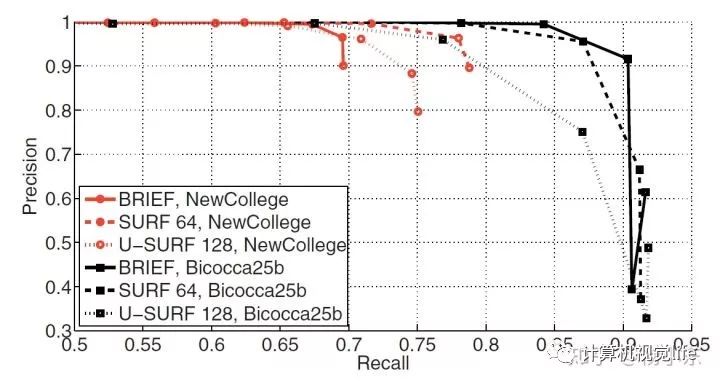
对于一个回环算法,通过调整参数,在一个数据集上测试,可绘制出一个准确率-召回率曲线,如下图。曲线的右上角越靠近右上角越好,越方越好,太绕了,O(∩_∩)O哈哈~。
1. DBoW2视觉词袋
我们的目的是比较两张图像之间的相似度,通过相似度来判断是否会回环。那么如何比较相似度呢?一种是可以通过匹配两帧之间的特征,统计一下匹配点的数量,这种方法太慢了。原因是什么呢?特征点本身是对图像信息进行了筛选、抽象和降维,哪是不是可以再抽象一下呢?可以,把特征再抽象为单词。比如,“车”,“猫”,“人”,打比方而已哈。那么我们可以分别统计两张图上有没有车,猫,人。据此来判断两幅图像是否相似。这里只有有、无(0、1)两种量。
DBOW2将BRIEF的聚类成 


因为视觉单词是固定的,所以一幅图像就可以用向量表示:

也就是说我们只需要对比词袋向量,就可以计算两幅图像的相似性。怎么对比能,有不同的分数计算方法,例如:

这里的计算类似于汉明距离,计算的是不相同的单词数量。
需要注意的是,实际的DBoW2中也不是只考虑单词的有无,也是会根据单词出现的多少考虑权重。另外,相似分数的计算方式也不太相同。后文会解释。
那么问题来了,上述的那些单词如何来的呢?DBoW2通过在大量图像中提取特征,利用K-Means方法聚类出 



利用
可以加速判断一个特征属于哪个单词。如果不使用K叉树,就需要与每个单词比较(计算汉明距离),共计需要比较
次。而使用K叉树之后,需要的比较次数变为
次。大大提高了速度。这里利用了K叉树的快速查找特性。
DBoW中存储了Direct Index,也就每个节点存储有一幅图像上所有归属与该节点的特征的index。在两帧进行特征匹配的时候,只需要针对每一个节点进行匹配就好了,大大缩小了匹配空间,加速了匹配速度。ORB-SLAM帧间匹配都使用了这个trick。
。在进行闭环搜索的时候,可以加快搜索过程的。具体的,我们只需要找与当前关键帧有相同单词的关键帧就可以了。




下面再来说DBoW2是如何计算相似分数的。
在构建词典的时候,使用了大量的数据。在这个环境中有的单词出现的次数多,有的单词出现的少。直观想一下,出现次数多的单词其实对环境不具有区分度,反而出现次数少的单词很有区分性。比如一个单词叫做“地砖”,环境中很多,用这个单词来比较两幅图像的话就不能显著区分两个环境。因此,引入一个TF-IDF(Term Frequency-Inverse Document Frequency)的权重,来降低这种单词的作用。


至此词典就构建OK了:一个K叉树,两个index(Inverse index,Direct Index),一个权重(TF-IDF)。
下面开始使用词典比较图像相似度。将一幅图像A的所有特征转换为词袋向量,这里不仅仅要考虑单词有无的问题,还要考虑单词的权重。A中有的单词多,有的单词少。单词多自然要加大权重,单词少自然要减少权重啦。引入另一个权重叫做TF(Term Frequency):

最后当前图像的一次单词的权重取为IDF和TF的乘积

这样,就组成了一个带权的词袋向量。

下面计算两幅图像A,B的相似度,这里就要考虑权重了。计算相似度的方法由很多,DBoW2的库里面就有L1、L2、ChiSquare等六种计算方式。比如L1距离为:

实际上,在比较相似度的时候只需要计算上述的分数就好了,这个速度就比特征匹配快的多。
2. ORB-SLAM中的回环
ORB-SLAM维护了一个数据库,这个数据库里面保存了每个单词能看到的关键帧。(inverse index)。每个关键帧都要从这个数据库中检测回环,检测完回环之后,每个关键帧都会加入到这个数据库中。当一个关键帧被删除之后,这个数据库也会被同时更新。这样做的好处就是加快回环搜索的速度,这个与DBoW的inverse index是相同的思想,只不过ORB-SLAM自己去维护了以下而已。
2.1 搜索闭环候选帧
下面进入正式的流程,因为ORB-SLAM使用了共视图,很多操作都可以采用共视图辅助。
这个流程吴博的视频已经讲的很清楚了,我这里做个搬运工作。
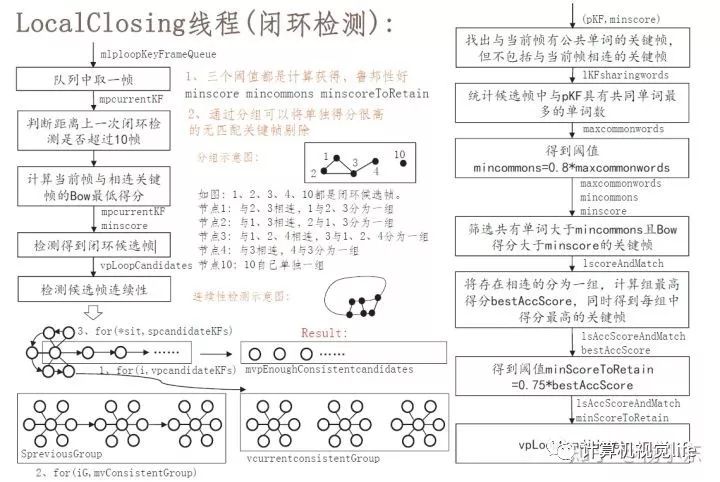
1. 做了降频,要求闭环与闭环之间至少经过10个关键帧。
2. 计算一个相对分数minsocre:计算当前帧与其共视图中的帧的相似分数,取其中最小的那个作为minsocre。因为DBoW计算出的绝对分数不具有可比性,取当前帧与共视帧之间最小的相似度作为基准,如果大于这个基准才有可能是闭环帧。
3. 从上文中说的数据库中查找闭环候选帧。因为数据库中维护了Inverse Index,所以可以快速找到与当前帧有共同单词的关键帧。其中就会有一个关键帧具有的共同单词数最大,为maxcommonwords。根据这个设一个阈值,mincommons = 0.8 * maxcommonwords,据此去掉共同单词太少的候选关键。再加上minscore的要求干掉一部分关键帧。再再加上候选帧不能在当前帧的共视图中的条件,又干掉一部分。之后,把相连的的候选帧归为一组,每个组计算一个累加分数,可以找到一个最大分数bestAccScore。据此,设置一个阈值,minScoreToRetain = 0.75*bestAccScore。用这个阈值干掉一部分分组,这样可以干掉一些孤立的闭环帧候选帧(孤立的可能都是错误的闭环)。剩下的这些分组中的关键帧就是闭环候选帧啦。
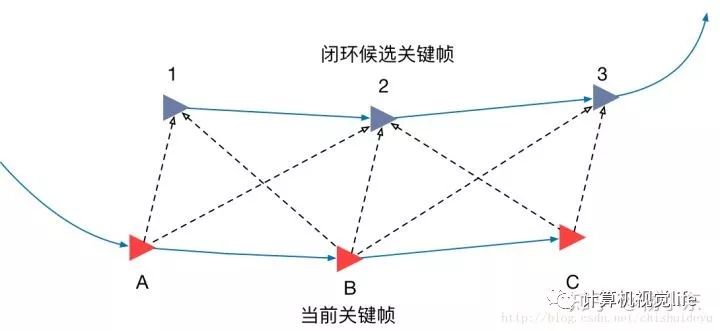
4. 连续性检测。现在,进一步对候选关键帧进行筛选。闭环不仅仅是单帧对单帧的匹配,好的闭环应该是多帧对多帧的闭环。也就是形成连续闭环,如下图所示。这一步请参考[4]。
5. 至此可以得到若干的比较可靠的候选关键帧了:mvpEnoughConsistentCandidates。上面那么多的步骤,都是为了保证准确率。SLAM中要求闭环的准确率达到100%。
2.2 几何校验,sim3
下面,还要进行几何校验。对每一个候选帧与当前帧计算Sim3变换。
匹配当前帧与闭环帧之间的特征点,利用DBoW加速一下(Direct Index的应用),匹配太少的候选帧直接就干掉了。
计算一个Sim3初值。
利用Sim3初值将候选关键帧的地图点再投影到当前帧,得到更多匹配。
然后优化Sim3. 第2-4步是在RANSAC框架下做的,只要有一个帧通过了测试,就跳出去了。这样就选出了一个闭环帧。
把闭环帧的共视关键帧全部取出来,形成了局部地图,把局部地图点再投到当前帧匹配,又形成了更多的匹配。检查一下匹配点的数量来确定是否接受此次闭环。
至此,已经找到了一个闭环帧,并且计算出了当前帧与闭环帧之间的Sim3变换。
2.3 Loop fusion
下面要去做Loop fusion:调整关键帧位姿,更新共视图。
首先,把当前帧和当前帧的相邻帧(共视帧&共视帧的共视帧),根据前面的Sim3变换对齐到闭环帧上。这样做的好处是可以迅速把相机拉回到闭环位姿,并且把局部地图也拉回去了,可以保证定位的连续性。
然后,更新共视图关系,把闭环帧和闭环帧的共视帧上的地图点投影到当前帧上来。进行地图点融合,匹配,更新共视帧。
上面的步骤其实就是把当前帧的局部地图和闭环帧的局部地图缝合起来。
2.4 优化
接下来,就要开始优化啦。
首先基于Essential graph优化一下,然后再来一个全局BA。
参考资料
[1] Williams B , Cummins M , José Neira, et al. A comparison of loop closing techniques in monocular SLAM[J]. Robotics and Autonomous Systems, 2009, 57(12):1188-1197.
[2] Galvez-Lo?Pez D , Tardos J D . Bags of Binary Words for Fast Place Recognition in Image Sequences[J]. IEEE Transactions on Robotics, 2012, 28(5):1188-1197.
[3] 第三十六课:ORB-SLAM2源码解析 -吴博(http://paopaorobot.org/bbs/read.php?tid=59&fid=8)
[4] https://blog.csdn.net/chishuideyu/article/details/76165461
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、算法竞赛、图像检测分割、医学影像、自动驾驶、综合等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

从零开始学习三维视觉核心技术SLAM,扫描查看介绍,3天内无条件退款

推荐阅读
从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
深度学习遇到SLAM | 如何评价基于深度学习的DeepVO,VINet,VidLoc?
新型相机DVS/Event-based camera的发展及应用
觉得有用,给个好看啦~




