【泡泡一分钟】针对无监督行人重识别问题的跨视图非对称度量学习(ICCV2017-104)
每天一分钟,带你读遍机器人顶级会议文章
标题:Cross-view Asymmetric Metric Learning for Unsupervised Person Re-identification
作者:Hong-Xing Yu, Ancong Wu ,and Wei-Shi Zheng
来源:ICCV 2017 ( IEEE International Conference on Computer Vision)
编译:王健,周平
审核:陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

视频监控中跨视图行人匹配存在的重要问题是行人重识别,而度量学习对行人重识别(RE-ID)有着相当的意义, 现有的度量方法大都基于监督学习,需要大量带标签的连续帧相机视图做训练。然而,实际应用中,可以得到大量不相交相机的视图,且都没有标签,这就限制了监督学习的应用扩展性。为了解决这个问题,本文提出针对无监督的行人重识别问题用无监督的非对称度量学习方法。该模型旨在用跨视图行人图像的对称聚类方法学习非对称度量,即每个视图的特定投影。我们的模型找到了一个共享空间,可以减小特定视图的偏差,达到更好的匹配效果。我们在基本框架上对五种RE-ID数据集进行了实验,用来证明该模型的有效性。通过对比发现,在无监督行人重识别方面,我们的模型比传统的无监督度量学习模型更具适用性。我们也对比了现有的无监督行人重识别方法,同样地,我们的模型明显优于它们。为了更明确,我们在无标签的RE-ID数据集上报告了结果,虽然对于文献意义不大但很重要。
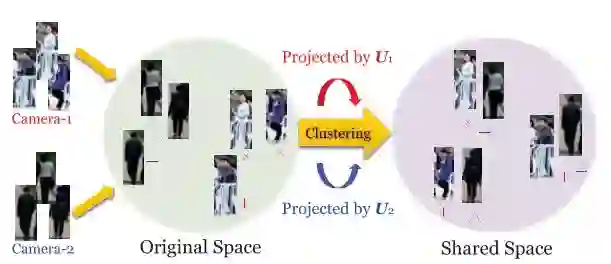
图1. 描述了特定干扰/偏差的视图以及本文思想。 来自不同相机的图像受到视图特定的干扰,例如Camera-1中的遮挡,Camera-2中的暗淡照明以及它们之间的视点变化。这些因素在原始特征空间中引入了偏差,因此无监督的重新识别极具挑战性。 本文模型通过聚类和联合学习特定视图的投影来构建数据,从而找到一个共享空间,其中视图特定偏差得意减小且得到更好的效果。
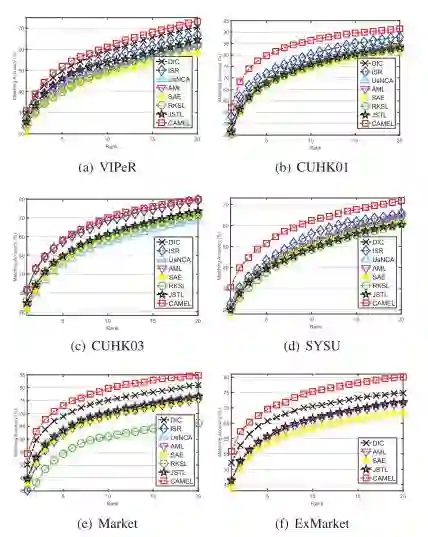
图2.CMC曲线。对于CUHK01,CUHK03和SYSU,本文将单次设置下的结果作为示例,展示出多次拍摄中可以观测到类似的图案。

Abstract
While metric learning is important for Person re-identification (RE-ID), a significant problem in visual surveillance for cross-view pedestrian matching, existing metric models for RE-ID are mostly based on supervised learning that requires quantities of labeled samples in all pairs of camera views for training. However, this limits their scalabilities to realistic applications, in which a large amount of data over multiple disjoint camera views is available but not labelled. To overcome the problem, we propose unsupervised asymmetric metric learning for unsupervised RE-ID. Our model aims to learn an asymmetric metric, i.e., specific projection for each view, based on asymmetric clustering on cross-view person images. Our model finds a shared space where view-specific bias is alleviated and thus better matching performance can be achieved. Extensive experiments have been conducted on a baseline and five large-scale RE-ID datasets to demonstrate the effectiveness of the proposed model. Through the comparison, we show that our model works much more suitable for unsupervised RE-ID compared to classical unsupervised metric learning models. We also compare with existing unsupervised RE-ID methods, and our model outperforms them with notable margins. Specifically, we report the results on large-scale unlabelled RE-ID dataset, which is important but unfortunately less concerned in literatures.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com