成为VIP会员查看完整内容
VIP会员码认证
首页
主题
会员
服务
注册
·
登录
度量学习
关注
3375
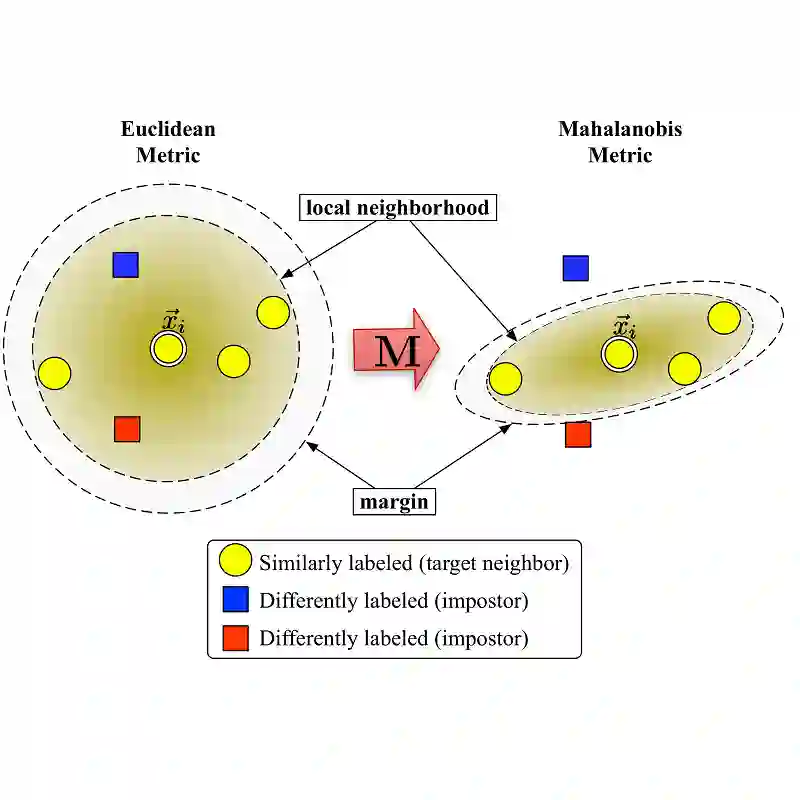
度量学习的目的为了衡量样本之间的相近程度,而这也正是模式识别的核心问题之一。大量的机器学习方法,比如K近邻、支持向量机、径向基函数网络等分类方法以及K-means聚类方法,还有一些基于图的方法,其性能好坏都主要有样本之间的相似度量方法的选择决定。 度量学习通常的目标是使同类样本之间的距离尽可能缩小,不同类样本之间的距离尽可能放大。
综合
百科
VIP
热门
动态
论文
精华
精品内容
「面向复杂场景的行人重识别综述 」最新2022研究进展综述
专知会员服务
38+阅读 · 2022年11月3日
「机器学习中原型学习」最新2022研究进展综述
专知会员服务
39+阅读 · 2022年10月30日
【CVPR2022】海德堡大学《深度视觉相似性与度量学习》教程,200+页ppt
专知会员服务
44+阅读 · 2022年6月22日
机器学习中原型学习研究进展
专知会员服务
47+阅读 · 2022年1月18日
智能视频监控关键技术:行人再识别研究综述
专知会员服务
40+阅读 · 2021年12月30日
【AAAI2022】 负样本问题:时间基础度量学习的复兴
专知会员服务
21+阅读 · 2021年12月26日
【博士论文】开放环境下的度量学习研究
专知会员服务
49+阅读 · 2021年12月4日
【CVPR2020】物体实例持续学习,Continual Learning of Object Instances
专知会员服务
32+阅读 · 2020年4月26日
参考链接
提示
微信扫码
咨询专知VIP会员与技术项目合作
(加微信请备注: "专知")
微信扫码咨询专知VIP会员
Top