SSD: Single Shot MultiBox Detector 深度学习笔记之SSD物体检测模型

本文原作者杨韬。AI研习社已获授权发布。
算法概述
本文提出的SSD算法是一种直接预测目标类别和bounding box的多目标检测算法。
与faster rcnn相比,该算法没有生成 proposal 的过程,这就极大提高了检测速度。针对不同大小的目标检测,传统的做法是先将图像转换成不同大小(图像金字塔),然后分别检测,最后将结果综合起来(NMS)。
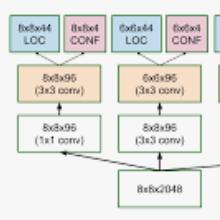
而SSD算法则利用不同卷积层的 feature map 进行综合也能达到同样的效果。算法的主网络结构是VGG16,将最后两个全连接层改成卷积层,并随后增加了4个卷积层来构造网络结构。对其中5种不同的卷积层的输出(feature map)分别用两个不同的 3×3 的卷积核进行卷积,一个输出分类用的confidence,每个default box 生成21个类别confidence;一个输出回归用的 localization,每个 default box 生成4个坐标值(x, y, w, h)。
此外,这5个feature map还经过 PriorBox 层生成 prior box(生成的是坐标)。上述5个feature map中每一层的default box的数量是给定的(8732个)。最后将前面三个计算结果分别合并然后传给loss层。
Default box
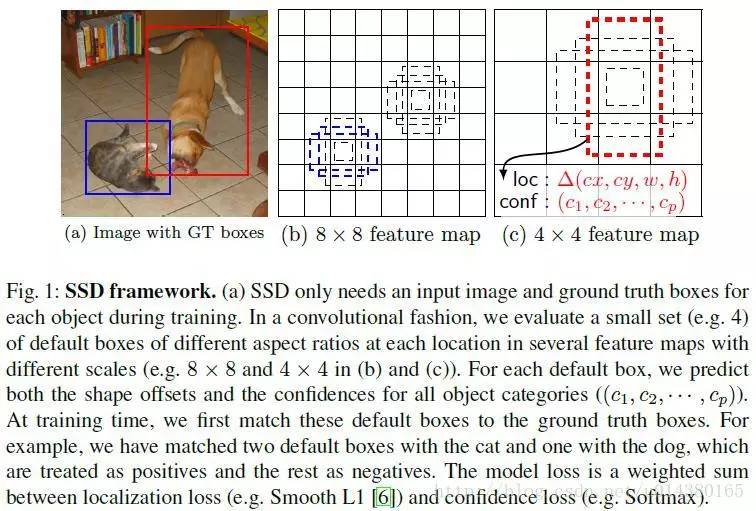
文章的核心之一是作者同时采用lower和upper的feature map做检测。
如图Fig 1 所示,这里假定有8×8和4×4两种不同的feature map。第一个概念是feature map cell,feature map cell 是指feature map中每一个小格子,如图中分别有64和16个cell。另外有一个概念:default box,是指在feature map的每个小格(cell)上都有一系列固定大小的box,如下图有4个(下图中的虚线框,仔细看格子的中间有比格子还小的一个box)。
假设每个feature map cell有k个default box,那么对于每个default box都需要预测c个类别score和4个offset,那么如果一个feature map的大小是m×n,也就是有m*n个feature map cell,那么这个feature map就一共有(c+4)*k * m*n 个输出。这些输出个数的含义是:采用3×3的卷积核对该层的feature map卷积时卷积核的个数,包含两部分(实际code是分别用不同数量的3*3卷积核对该层feature map进行卷积):数量c*k*m*n是confidence输出,表示每个default box的confidence,也就是类别的概率;数量4*k*m*n是localization输出,表示每个default box回归后的坐标)。训练中还有一个东西:prior box,是指实际中选择的default box(每一个feature map cell 不是k个default box都取)。
也就是说default box是一种概念,prior box则是实际的选取。训练中一张完整的图片送进网络获得各个feature map,对于正样本训练来说,需要先将prior box与ground truth box做匹配,匹配成功说明这个prior box所包含的是个目标,但离完整目标的ground truth box还有段距离,训练的目的是保证default box的分类confidence的同时将prior box尽可能回归到ground truth box。
举个列子:假设一个训练样本中有2个ground truth box,所有的feature map中获取的prior box一共有8732个。那个可能分别有10、20个prior box能分别与这2个ground truth box匹配上。训练的损失包含定位损失和回归损失两部分。
作者的实验表明default box的shape数量越多,效果越好。
这里用到的 default box 和Faster RCNN中的 anchor 很像,在Faster RCNN中 anchor 只用在最后一个卷积层,但是在本文中,default box 是应用在多个不同层的feature map上。
那么default box的scale(大小)和aspect ratio(横纵比)要怎么定呢?假设我们用m个feature maps做预测,那么对于每个featuer map而言其default box的scale是按以下公式计算的:
∨
Sk=Smin+Smax−Sminm−1(k−1),k∈[1,m]
这里smin是0.2,表示最底层的scale是0.2;smax是0.9,表示最高层的scale是0.9。
至于aspect ratio,用a_r表示为下式:注意这里一共有5种aspect ratio
a_r = \{1, 2, 3, 1/2, 1/3\}
因此每个default box的宽的计算公式为:
w_k^a=s_k\sqrt{a_r}
高的计算公式为:(很容易理解宽和高的乘积是scale的平方)
h_k^a=s_k/\sqrt{a_r}
另外当aspect ratio为1时,作者还增加一种scale的default box:
s_k^{'}=\sqrt{s_{k}s_{k+1}}
因此,对于每个feature map cell而言,一共有6种default box。
可以看出这种default box在不同的feature层有不同的scale,在同一个feature层又有不同的aspect ratio,因此基本上可以覆盖输入图像中的各种形状和大小的object!
(训练自己的样本的时候可以在FindMatch()之后检查是否能覆盖了所有的 ground truth box)
源代码中的 ssd_pascal.py 设计了上面几个参数值,caffe 源码 prior_box_layer.cpp 中Forward_cpu()实现。
最后会得到(38*38*4 + 19*19*6 + 10*10*6 + 5*5*6 + 3*3*4 + 1*1*4)= 8732个prior box。
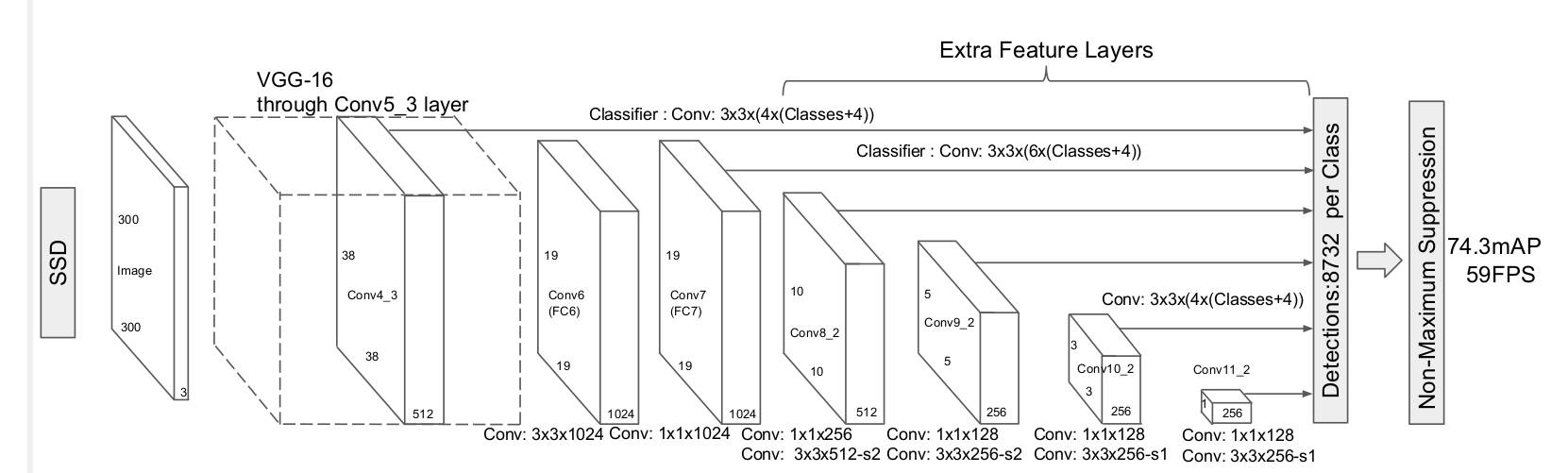
Fig.2 SSD 框架
正负样本
将prior box 和 grount truth box 按照IOU(JaccardOverlap)进行匹配,匹配成功则这个prior box就是positive example(正样本),如果匹配不上,就是negative example(负样本),显然这样产生的负样本的数量要远远多于正样本。这里将前向loss进行排序,选择最高的num_sel个prior box序号集合 D。那么如果Match成功后的正样本序号集合P。那么最后正样本集为 P - D\cap{P},负样本集为 D - D\cap{P}。同时可以通过规范num_sel的数量(是正样本数量的三倍)来控制使得最后正、负样本的比例在 1:3 左右。
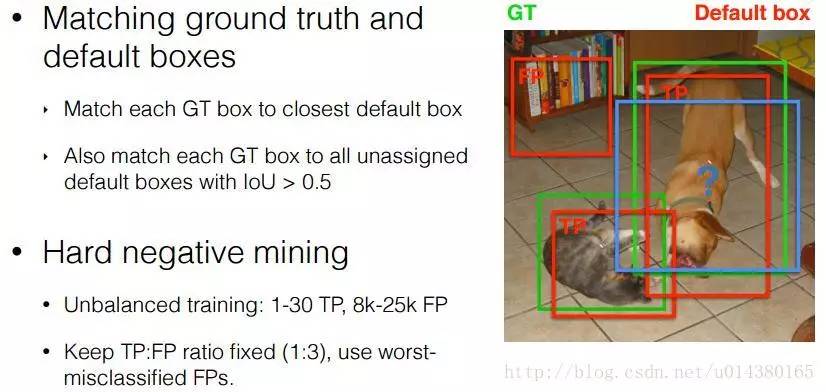
Fig.3 positive and negtive sample VS ground_truth box
1.正样本获得
我们已经在图上画出了prior box,同时也有了ground truth,那么下一步就是将prior box匹配到ground truth上,这是在 src/caffe/utlis/bbox_util.cpp 的 FindMatches 以及子函数MatchBBox函数里完成的。值得注意的是先是从groudtruth box出发给每个groudtruth box找到了最匹配的prior box放入候选正样本集,然后再从prior box出发为prior box集中寻找与groundtruth box满足IOU>0.5的一个IOU最大的prior box(如果有的话)放入候选正样本集,这样显然就增大了候选正样本集的数量。
2.负样本获得
在生成一系列的 prior boxes 之后,会产生很多个符合 ground truth box 的 positive boxes(候选正样本集),但同时,不符合 ground truth boxes 也很多,而且这个 negative boxes(候选负样本集),远多于 positive boxes。这会造成 negative boxes、positive boxes 之间的不均衡。训练时难以收敛。
因此,本文采取,先将每一个物体位置上对应 predictions(prior boxes)loss 进行排序。 对于候选正样本集:选择最高的几个prior box与正样本集匹配(box索引同时存在于这两个集合里则匹配成功),匹配不成功则删除这个正样本(因为这个正样本不在难例里已经很接近ground truth box了,不需要再训练了);对于候选负样本集:选择最高的几个prior box与候选负样本集匹配,匹配成功则作为负样本。
这就是一个难例挖掘的过程,举个例子,假设在这8732个prior box里,经过FindMatches后得到候选正样本P个,候选负样本那就有8732-P个。将prior box的prediction loss按照从大到小顺序排列后选择最高的M个prior box。如果这P个候选正样本里有a个box不在这M个prior box里,将这M个box从候选正样本集中踢出去。如果这8732-P个候选负样本集中包含的8732-P有M-a个在这M个prior box,则将这M-a个候选负样本作为负样本。SSD算法中通过这种方式来保证 positives、negatives 的比例。实际代码中有三种负样本挖掘方式:
如果选择HARD_EXAMPLE方式(源于论文Training Region-based Object Detectors with Online Hard Example Mining),则默认M = 64,由于无法控制正样本数量,这种方式就有点类似于分类、回归按比重不同交替训练了。
如果选择MAX_NEGATIVE方式,则M = P*neg\_pos\_ratio,这里当neg\_pos\_ratio = 3的时候,就是论文中的正负样本比例1:3了。
enum MultiBoxLossParameter_MiningType {
MultiBoxLossParameter_MiningType_NONE = 0,
MultiBoxLossParameter_MiningType_MAX_NEGATIVE = 1,
MultiBoxLossParameter_MiningType_HARD_EXAMPLE = 2
};
3.Data augmentation
本文同时对训练数据做了 data augmentation,数据增广。
每一张训练图像,随机的进行如下几种选择:
使用原始的图像
随机采样多个 patch(CropImage),与物体之间最小的 jaccard overlap 为:0.1,0.3,0.5,0.7 与 0.9
采样的 patch 是原始图像大小比例是 [0.3,1.0],aspect ratio 在 0.5 或 2。
当 groundtruth box 的 中心(center)在采样的 patch 中且在采样的 patch中 groundtruth box面积大于0时,我们保留CropImage。
在这些采样步骤之后,每一个采样的 patch 被 resize 到固定的大小,并且以 0.5 的概率随机的 水平翻转(horizontally flipped,翻转不翻转看prototxt,默认不翻转)
这样一个样本被诸多batch_sampler采样器采样后会生成多个候选样本,然后从中随机选一个样本送人网络训练。
网络结构
SSD的结构在VGG16网络的基础上进行修改,训练时同样为conv1_1,conv1_2,conv2_1,conv2_2,conv3_1,conv3_2,conv3_3,conv4_1,conv4_2,conv4_3,conv5_1,conv5_2,conv5_3(512),fc6经过3*3*1024的卷积(原来VGG16中的fc6是全连接层,这里变成卷积层,下面的fc7层同理),fc7经过1*1*1024的卷积,conv6_1,conv6_2(对应上图的conv8_2),conv7_1,conv7_2,conv,8_1,conv8_2,conv9_1,conv9_2,loss。然后一方面:针对conv4_3(4),fc7(6),conv6_2(6),conv7_2(6),conv8_2(4),conv9_2(4)(括号里数字是每一层选取的default box种类)中的每一个再分别采用两个3*3大小的卷积核进行卷积,这两个卷积核是并列的(括号里的数字代表prior box的数量,可以参考Caffe代码,所以上图中SSD结构的倒数第二列的数字8732表示的是所有prior box的数量,是这么来的38*38*4+19*19*6+10*10*6+5*5*6+3*3*4+1*1*4=8732),这两个3*3的卷积核一个是用来做localization的(回归用,如果prior box是6个,那么就有6*4=24个这样的卷积核,卷积后map的大小和卷积前一样,因为pad=1,下同),另一个是用来做confidence的(分类用,如果prior box是6个,VOC的object类别有20个,那么就有6*(20+1)=126个这样的卷积核)。
如下图是conv6_2的localizaiton的3*3卷积核操作,卷积核个数是24(6*4=24,由于pad=1,所以卷积结果的map大小不变,下同):这里的permute层就是交换的作用,比如你卷积后的维度是32×24×19×19,那么经过交换层后就变成32×19×19×24,顺序变了而已。而flatten层的作用就是将32×19×19×24变成32*8664,32是batchsize的大小。另一方面结合conv4_3(4),fc7(6),conv6_2(6),conv7_2(6),conv8_2(4),conv9_2(4)中的每一个和数据层(ground truth boxes)经过priorBox层生成prior box。
经过上述两个操作后,对每一层feature的处理就结束了。对前面所列的5个卷积层输出都执行上述的操作后,就将得到的结果合并:采用Concat,类似googleNet的Inception操作,是通道合并而不是数值相加。
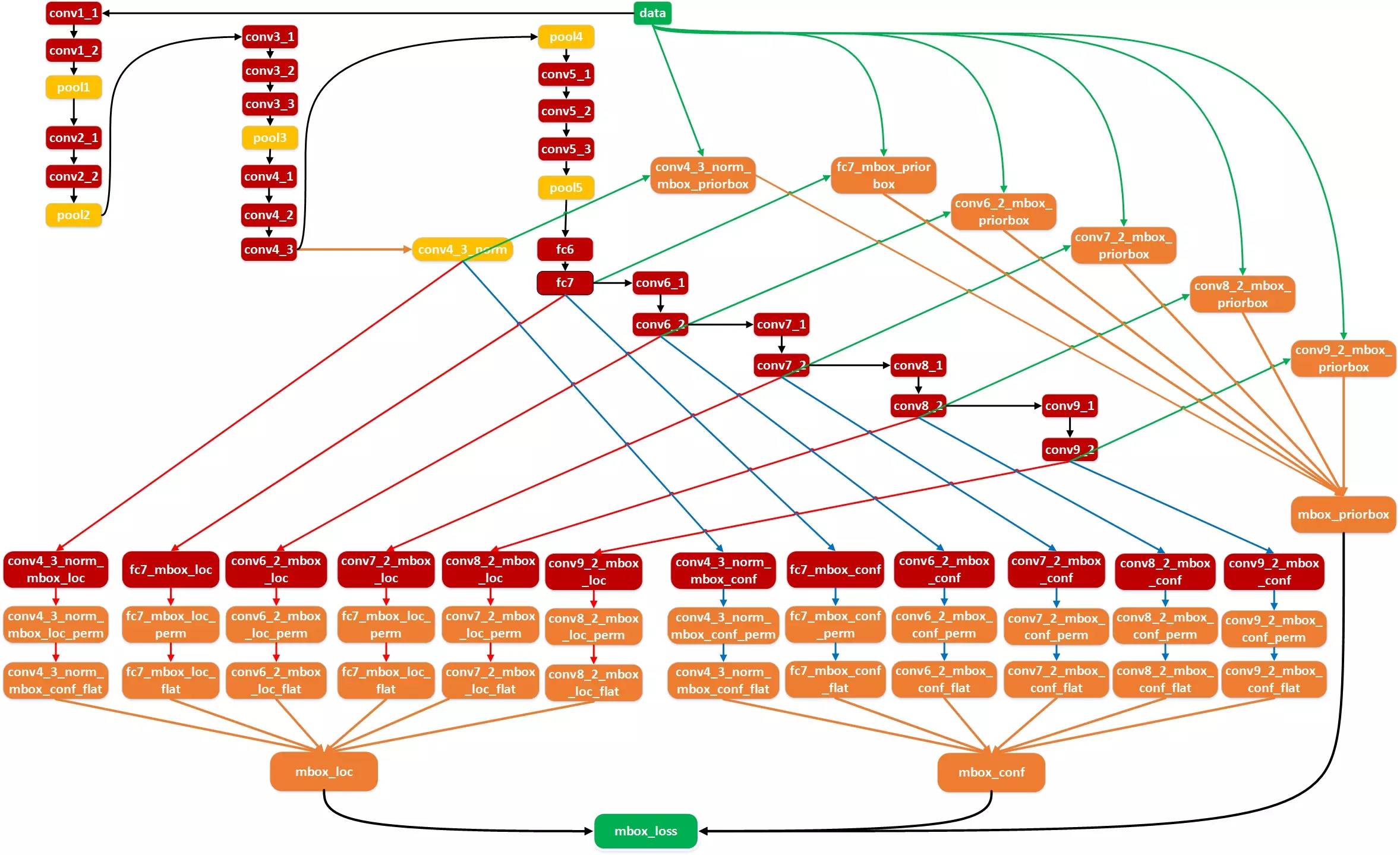
Fig.5 SSD 流程
损失函数方面:和Faster RCNN的基本一样,由分类和回归两部分组成,可以参考Faster RCNN,这里不细讲。总之,回归部分的loss是希望预测的box和prior box的差距尽可能跟ground truth和prior box的差距接近,这样预测的box就能尽量和ground truth一样。

上面得到的8732个目标框经过Jaccard Overlap筛选剩下几个了;其中不满足的框标记为负数,其余留下的标为正数框。紧随其后:
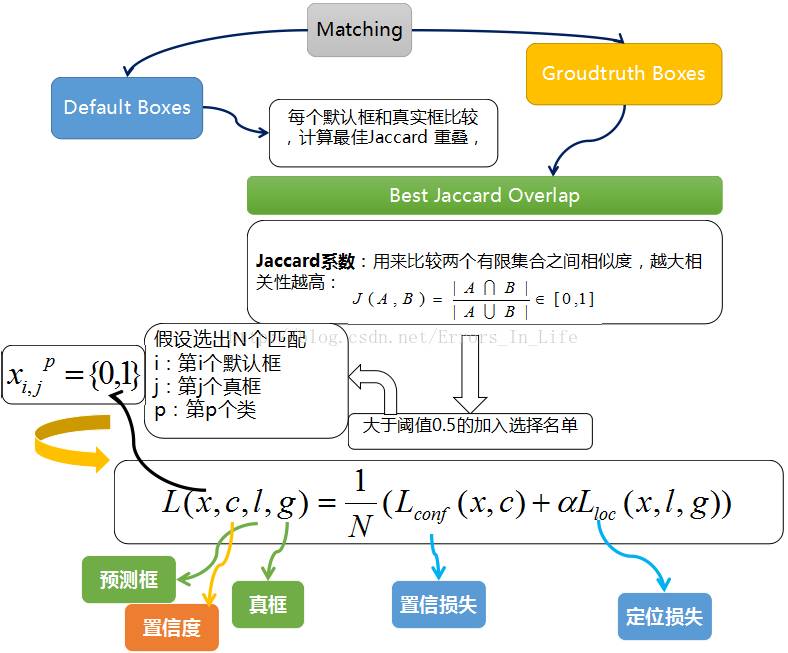
训练过程中的 prior boxes 和 ground truth boxes 的匹配,基本思路是:让每一个 prior box 回归并且到 ground truth box,这个过程的调控我们需要损失层的帮助,他会计算真实值和预测值之间的误差,从而指导学习的走向。
SSD 训练的目标函数(training objective)源自于 MultiBox 的目标函数,但是本文将其拓展,使其可以处理多个目标类别。具体过程是我们会让每一个 prior box 经过Jaccard系数计算和真实框的相似度,阈值只有大于 0.5 的才可以列为候选名单;假设选择出来的是N个匹配度高于百分之五十的框吧,我们令 i 表示第 i 个默认框,j 表示第 j 个真实框,p表示第p个类。那么x_{ij}^p表示 第 i 个 prior box 与 类别 p 的 第 j 个 ground truth box 相匹配的Jaccard系数,若不匹配的话,则x_{ij}^p=0。总的目标损失函数(objective loss function)就由 localization loss(loc) 与 confidence loss(conf) 的加权求和:
N 是与 ground truth box 相匹配的 prior boxes 个数
localization loss(loc) 是 Fast R-CNN 中 Smooth L1 Loss,用在 predict box(l) 与 ground truth box(g) 参数(即中心坐标位置,width、height)中,回归 bounding boxes 的中心位置,以及 width、height
confidence loss(conf) 是 Softmax Loss,输入为每一类的置信度 c
权重项 α,可在protxt中设置 loc_weight,默认设置为 1
使用注意
1. 使用batch_sampler做data argument时要注意是否crop的样本只包含目标很小一部分。
2.检查对于你的样本来说回归和分类问题哪个更难,以此调整multibox_loss_param中loc_weight进行训练。
3.正负样本比例,HARD_EXAMPLE方式默认只取64个最高predictions loss来从中寻找负样本,检查你的样本集中正负样本比例是否合适。

后台回复 “我要进群” 加入 AI 技术讨论群
新人福利
关注 AI 研习社(okweiwu),回复 1 领取
【超过 1000G 神经网络/AI/大数据、教程、论文!】
内推时间 | AI研习社帮你找了28个职位
▼▼▼