【泡泡图灵智库】在类似沙漠这种挑战环境下,用微型飞行器编队实现磁性物体的定位、抓取和搬运(ICRA2018)
泡泡图灵智库,带你精读机器人顶级会议文章
标题:Localization, Grasping, and Transportation of Magnetic Objects by a team of MAVs in Challenging Desert like Environments
作者:Giuseppe Loianno, Vojtech Spurny, Justin Thomas, et al..
来源:2018 IEEE ICRA
播音员:王肃
编译:李建华
审核:彭锐
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——在类似沙漠这种挑战环境下,用微型飞行器编队实现磁性物体的定位、抓取和搬运,该文章发表于2018 IEEE ICRA。
自主微型飞行器(MAV)在现实生活中有可能会涉及抓取和运输的任务,但存在几个困难的技术挑战需要解决。在本文中,我们解决了MAV在具有挑战性的户外场景中进行协同定位,抓取和搬运物体所涉及的设计,控制,估计和规划问题。我们展示了一个自主的MAV编队,该编队能够规划安全的航迹来操纵含铁的物体,同时保证飞行器之间不会发生碰撞,并自动创建物体在环境中的位置地图。我们的解决方案主要是分布式的,允许编队捡起并运输铁质圆盘到最终目的地,而且不会发生碰撞。使用了一种新型的磁性夹具,并配置了新颖的反馈方法,能够感知是否成功抓取。我们开源了夹具的设计,以及构建平台的所有组件方案,以供社区使用。最后,实验结果验证了本文的解决方案,解决的困难包括不断变化的风,不平坦的地形和沙地条件。
主要贡献
1)介绍了如何对每个飞行器进行可靠的状态估计和控制,从而成功导航和抓取含铁物体。
2)报道了无人机队列的设计和协调控制方案,该方案可以使该队列能够识别和收集含铁物体,并将它们运送到共同的目的地。
3)提供了夹具的设计方案,开源了相关的设计文件和代码,该夹具非常适合飞行器抓取目标使用。整个系统所有硬件的成本不到3500美元。
4)这是第一次在诸如沙漠等具有挑战性的环境下同时解决了状态估算、航迹规划和控制问题。
系统方案
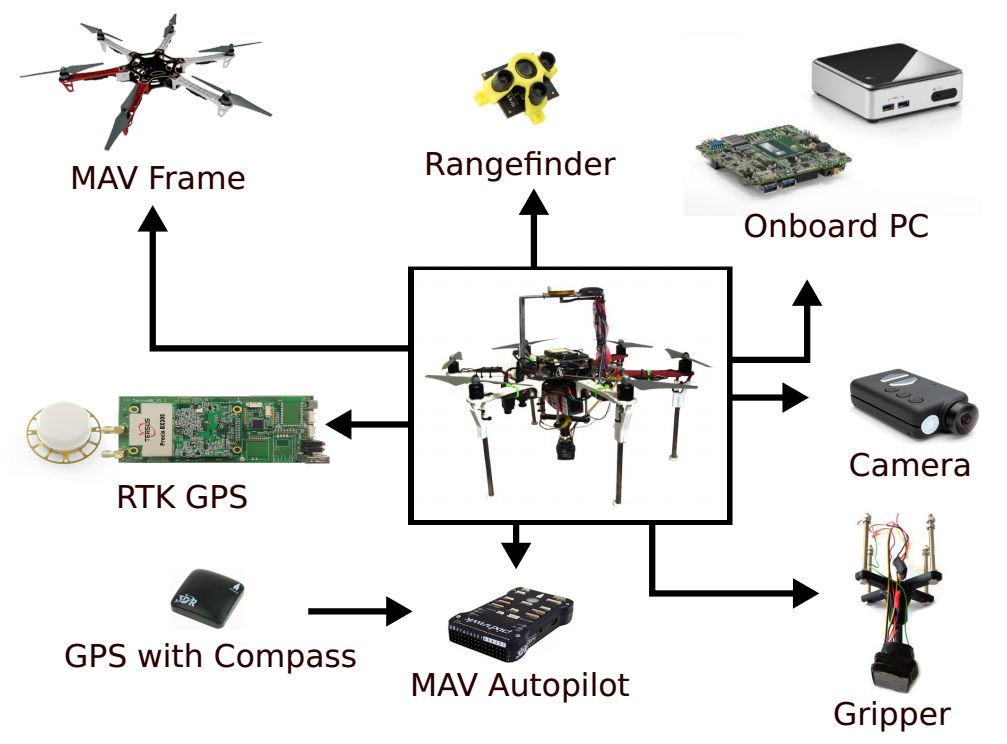
图1系统组成图
采用大疆无人机作为载机,同时配备了GPS、相机等传感器,最核心的是配备了一个抓捕器,采用电磁铁来抓取含铁物体,并配了一个霍尔效应传感器来感知是否抓取到物体。
系统设计涉及到的关键点
1、位置控制。建立无人机的动态运动模型,包括速度、加速度、角速度等动力学模型。根据现在位置与规定的轨迹偏差,实时调整无人机电机的速度。
2、轨迹规划。主要考虑无人机间的碰撞问题。本文的一个策略是不同无人机在不同的高度,同时在水平方向平均拉开一定的距离。
3、状态估计。为了能够抓取物体,对无人机位置的估计精度要求较高,误差要求在厘米量级。本次任务利用主要利用GPS、高度传感器的数据作为输入,再采用线性卡尔曼滤波模型得到位置。
4、目标检测定位。采用了三维RGB查找表网格法来区分目标与背景,需要一个半自动的标定过程。标定时,利用相机对给定的目标进行识别,人为指定识别结果的正确与否,以实现模型的更新。采用了HSV高斯混合模型来确定目标和背景区分的阈值。本方法的优点是实现效率特别高。找到目标后,估算目标的边界框,像素数,质心,凹凸性,紧凑型等信息,然后剔除非圆形目标,再计算剩下目标的相对位置。
主要结果
在阿布扎比沙漠执行了比赛项目,在地形未知、风力变化、通信不可靠的情况下完成了任务。

图2 无人机抓取了一个蓝色的物体
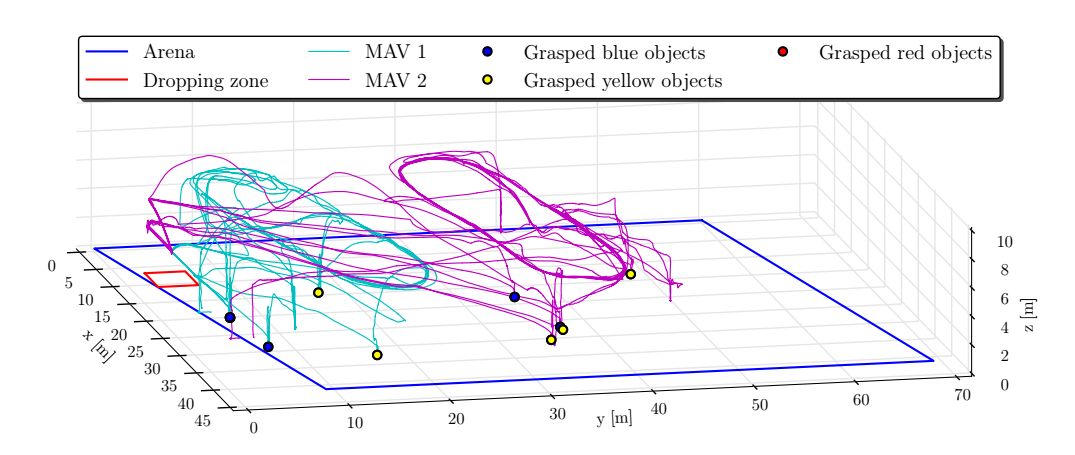
图3 两个无人机执行抓取任务的飞行轨迹,红色方框为抓到物体后的投放框
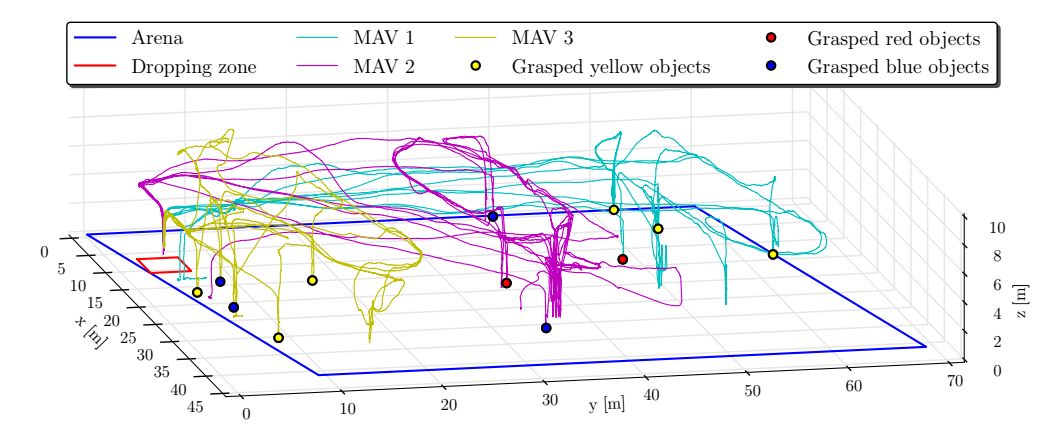
图4 三个无人机执行抓取任务的飞行轨迹,物体有红色、蓝色、黄色三种

表1 无人机抓取物体前后的导航精度,可以看到,物体重量的改变对精度影响不大,误差都在厘米量级

Abstract
Autonomous Micro Aerial Vehicles have the potential to assist in real life tasks involving grasping and transportation, but not before solving several difficult research challenges. In this work, we address the design, control, estimation, and planning problems for cooperative localization, grasping, and transportation of objects in challenging outdoor scenarios. We demonstrate an autonomous team of MAVs able to plan safe trajectories for manipulation of ferrous objects, while guaranteeing inter-robot collision avoidance and automatically creating a map of the objects in the environment. Our solution is predominantly distributed, allowing the team to pick and transport ferrous disks to a final destination without collisions. This result is achieved using a new magnetic gripper with a novel feedback approach, enabling the detection of successful grasping. The gripper design and all the components to build a platform are clearly provided as open-source hardware for reuse by the community. Finally, the proposed solution is validated through experimental results where difficulties include inconsistent wind, uneven terrain, and sandy conditions.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




