【泡泡图灵智库】底层主动视觉导航:利用势场提高视觉定位鲁棒性
泡泡图灵智库,带你精读机器人顶级会议文章
标题:Low-Level Active Visual Navigation: Increasing Robustness of Vision-Based Localization Using Potential Fields
作者:Romulo T. Rodrigues, Meysam Basiri, A. Pedro Aguiar, and Pedro Miraldo
来源:IEEE ROBOTICS AND AUTOMATION LETTERS 2018
编译:李建华
审核:彭锐
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——底层主动视觉导航:利用势场提高视觉定位鲁棒性,该文章发表于IEEE ROBOTICS AND AUTOMATION LETTERS 2018。
本文提出了一种底层视觉导航算法来改善移动机器人的视觉定位鲁棒性。该算法基于人工势场,将当前图像中的每个特征与有吸引力的或中性的势能相关联,其目的是生成一个控制指令,驱动机器人朝向目标运动的同时,保证视野内的图像特征丰富,从而提高定位性能。本方法的一个关键特性是它不依赖于地图,因此它是一种轻量级的解决方案,可以部署在小型的空中机器人中,因为这样的机器人面临的主要约束是存储和计算能力限制。仿真及实验结果表明,所提出的方法可以有效将机器人导航到指定的目标,其选择的路径可避免定位失败。实验中的机器人是一个配有下视摄像头的微型四旋翼飞行器。
背景介绍
传统的视觉里程计根据机器人拍摄到的图像特征进行匹配和跟踪,得到自身的相对位置,一般不控制行进路径,是一种被动定位技术。要实现准确的定位,一般需要假定场景为准静止,而且纹理特征丰富。
主动定位技术则根据拍摄的图像,参与控制回路,主动改变行进的路径或者相机的朝向,确保获取的图像特征尽可能丰富。
人工势场被用来规避障碍物,在这种框架下,目标会对机器人产生吸引力,而障碍物产生排斥力,改变行进轨迹。

图1本文要解决的问题示意图
图(a),无人机朝目标飞去,但是由于选择的路径缺少图像特征,视觉定位失败,进而导航失败。图(b),本文提出的算法将选择如图所示的路径,该路径图像特征丰富,增强了视觉定位的鲁棒性。
算法流程
1、将图像特征转换为电荷量
根据飞行器朝向目标的飞行速度矢量、特征点与图像中心连线的矢量,建立转换公式。一般而言,电荷大小与上述两个矢量的夹角相关,角度越小,说明特征方向和目标方向越趋同,电荷越大。
2、场矢量计算
每个电荷会对图像中的任何一个点施加作用力。首先建立了每个电荷对任意点的作用力计算公式,一般而言,距离越近,作用力越小。此外,作用力的方向与电荷位置相关。
然后计算所有电荷对图像中心点的作用力的矢量和,再对矢量做归一化,得到的矢量为趋向特征丰富区域的速度方向,该方向和趋向目标的方向加权和得到最后的速度方向。加权系数属于高层级优化的内容,用于平衡特征方向和目标方向。控制飞行器朝向加权后的方向飞行,既可以保证到达目标位置,还让整个行进过程始终能得到特征丰富的图像。
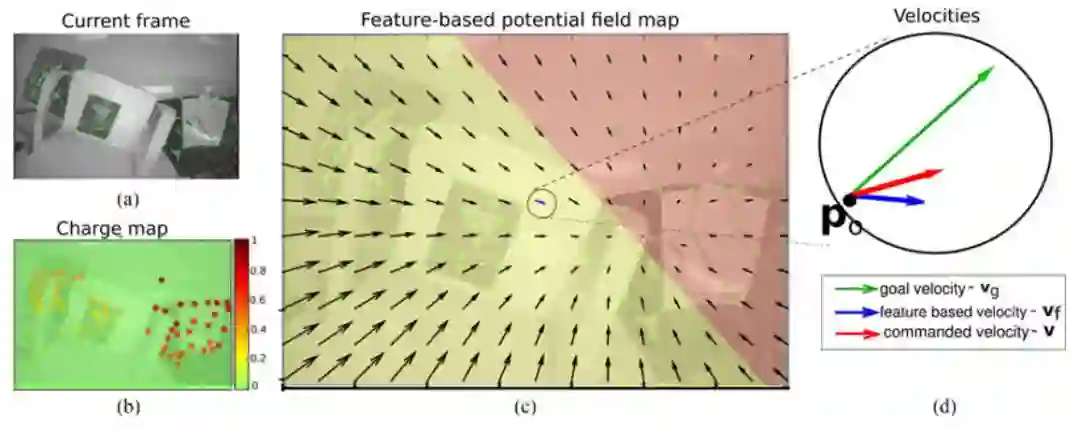
图2势场仿真算例
图中(a)为当前图像中的特征点;(b)为特征转换为电荷的热图。飞行器当前位置指向目标的矢量在图像平面的投影指向图中右上角,因此,图中靠右边的特征点电荷量更大,颜色更红;(c)电荷对图中任何一点的作用力矢量图;(d)为势场对中心点的作用力矢量,绿色为目标方向,蓝色为势场作用力方向,加权求和得到的为红色矢量。
主要结果

图3 算法仿真结果
飞行任务为从红色方块飞到绿色方块,飞行距离10m,可以看到,所有的飞行轨迹都选择了纹理特征丰富的路径,而不是简单的直线飞行。图d由于环境纹理丰富,轨迹最接近直线。只有图f出现了问题,进入了死循环,纹理丰富方向和目标方向正好反向,走不出局部最小值。只需要程序增加判读,避免重复路径,解决该问题。
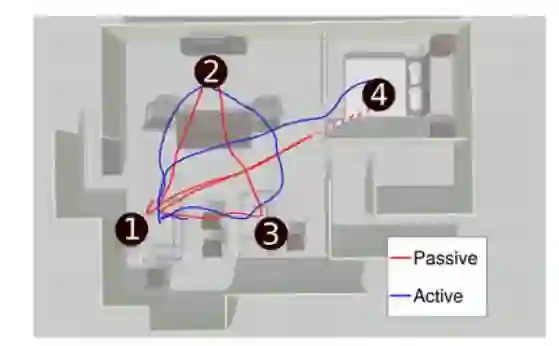
图4 真实场景下的被动及主动导航飞行轨迹图
飞行路径为1->2->3->1->4,可以看到本文算法提供的主动导航路径会主动偏离直线,选择特征丰富的路径,而被动导航的轨迹接近直线。
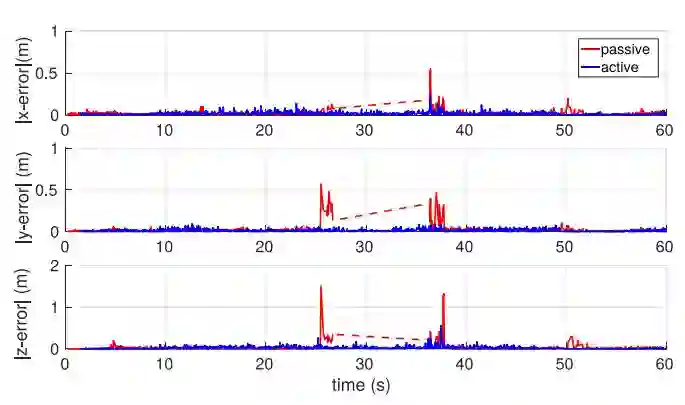
图5 上述实验采用ORB-SLAM进行定位的误差结果
可以看到,本文提出的算法保证了SLAM的精度始终处于较高水平,而被动导航可能因纹理特征少定位失败。图中被动导航定位误差在25s之后迅速飙升,以至于定位失败(图中红色虚线部分)。
主动导航,有99.1%的图像成功提取到了特征,而被动导航者只有90.2%。
总结:本文基于人工势场的方法,建立了图像特征与势能的关系,给飞行器施加朝向特征丰富区域的作用力,引导飞行器在飞向目标的同时,选择能够保持得到稳定图像特征的轨迹,提高了视觉定位与导航的鲁棒性。

Abstract
This letter proposes a low-level visual navigation algorithm to improve visual localization of a mobile robot. The algorithm, based on artificial potential fields, associates each feature in the current image frame with an attractive or neutral potential energy, with the objective of generating a control action that drives the vehicle towards the goal, while still favoring feature rich areas within a local scope, thus improving the localization performance. One key property of the proposed method is that it does not rely on mapping, and therefore it is a lightweight solution that can be deployed on miniaturized aerial robots, in which memory and computational power are major constraints. Simulations and real experimental results using a mini quadrotor equipped with a downward looking camera demonstrate that the proposed method can effectively drive the vehicle to a designated goal through a path that prevents localization failure.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


