【泡泡一分钟】用于精确和灵活实例重建的CAD先验(ICCV2017-15)
每天一分钟,带你读遍机器人顶级会议文章
标题:CAD Priors for Accurate and Flexible Instance Reconstruction
作者:TolgaBirdal,SlobodanIlic
来源:International Conference on Computer Vision (ICCV 2017)
播音员:糯米
编译:张建
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

我们提出了一个有效的和自动的方法,在动态杂波和闭塞的存在下,从多个无组织和非结构化的点云中对大的三维物体进行准确的实例重建。与传统扫描中背景被假定为相当的静态相反,我们的目标是处理动态杂波,在背景扫描过程中背景会发生剧烈变化。目前,除非将感兴趣的对象首先从场景的其余部分分割出来,否则用可用的方法解决这个问题是很单调乏味的。
我们通过假设与要重建的对象大致类似的,先验的CAD模型的可用性来解决这个问题。这种假设几乎总是适用于工业检测或逆向工程。借助于这先验的行为作为代理,我们提出了一个完全增强的管道,能够从场景中自动检测和分割感兴趣的对象,并创建一个在线的,具有线性复杂度的姿势图。这允许初始扫描对准CAD模型空间,然后在没有CAD约束的情况下精化,以完全恢复高保真三维重建,并精确到传感器噪声级。
我们也贡献了一种新的目标检测方法,局部隐式形状模型(LISM),并给出一种快速的验证方案。我们在多个数据集中评估我们的方法,展示了从125m3的小尺寸中准确的重建物体的能力。

图1:我们的三维重建方法。(a)输入三维CAD模型。(b)要重建的实例图像。(c)点云三维模型的检测。(d)我们最后获得的重建,与先验的名义CAD进行了近距离比较。
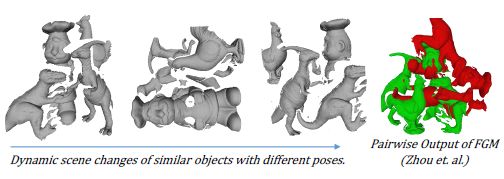
图2:Mian数据集上的动态杂波和遮挡:场景间物体相对位置会变化。这很容易欺骗现代全局注册算法。我们在物体层进行操作,避免了这个问题。
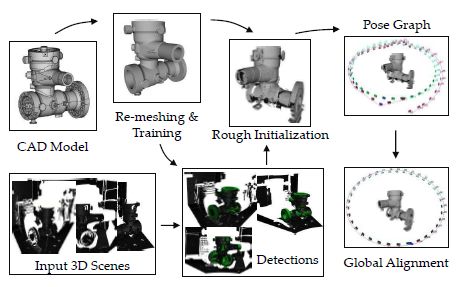
图3:提出的三维重建管道:先验的CAD模型被训练来创建模型表示。输入场景并进行模型姿态分析。姿态估计初始化一个粗糙的重建,分割和自动计算姿势图。这进一步细化到完全重建。
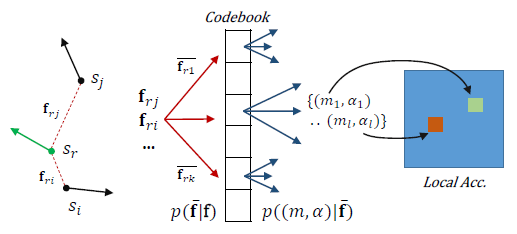
图4:局部隐式投票:给定多个现场点对,绑在一个共同的引用sr上,我们生成特征fri,激活不同码本的桶(中间)。在sr的局部投票空间中,每一个桶为多个(m,α)对投票。
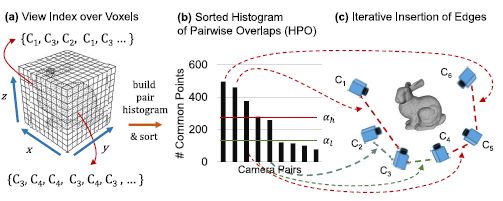
图5:姿势图计算。看文本有更多的细节。
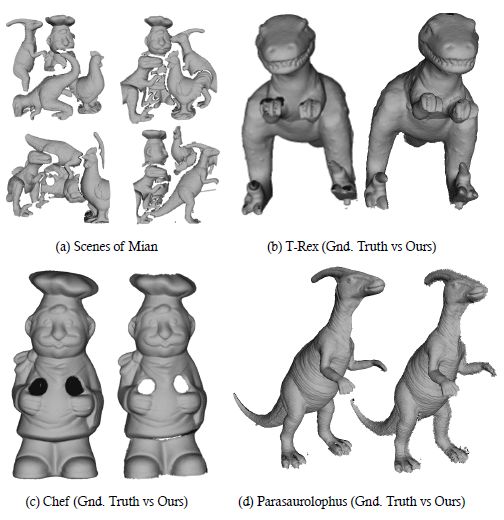
图6:在Mian数据集上的结果。(a)数据集场景的子集。(b,c,d)三个物体的地面真实模型(左)和我们的重建(右)。
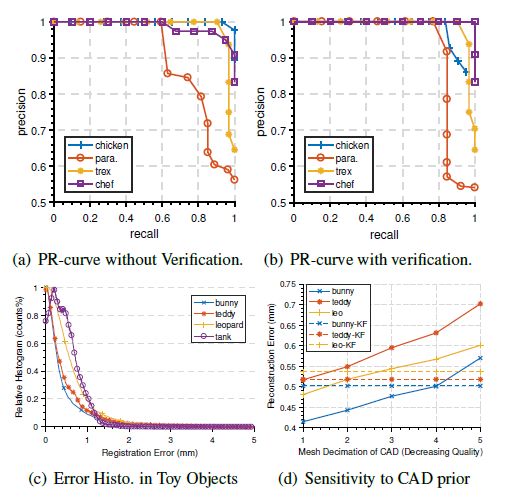
图7:LISM的性能与在Mian数据集上的验证。
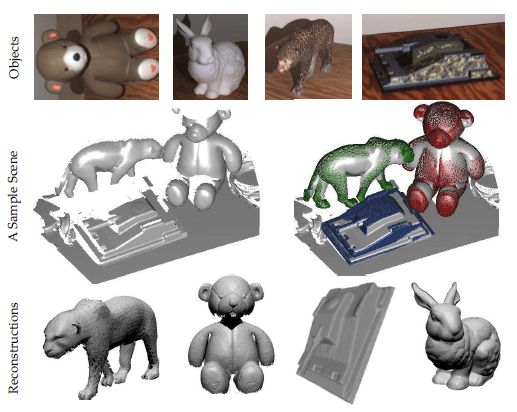
图8:玩具对象的定性结果。第一行:对象的真实图像;第二行:示例场景和检测可视化;第三行:我们的结果。
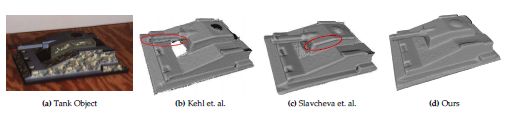
图9:坦克对象的视觉比较。注意我们的方法保存锐利特征的能力。
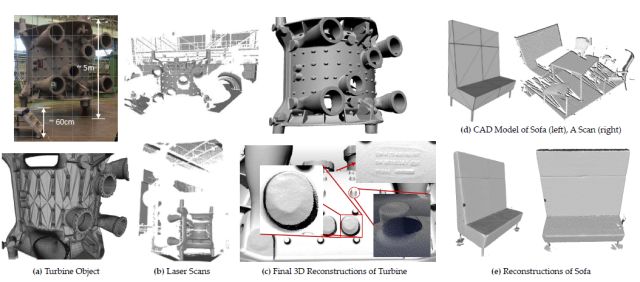
图10:对捕获的杂乱扫描(b)中的涡轮(a)进行的重建展示在(c)中。沙发的结果显示在(d, e)。

Abstract
We present an efficient and automatic approach for accurate instance reconstruction of big 3D objects from multiple, unorganized and unstructured point clouds, in presence of dynamic clutter and occlusions. In contrast to conventional scanning, where the background is assumed to be rather static, we aim at handling dynamic clutter where the background drastically changes during object scanning. Currently, it is tedious to solve this problem with available methods unless the object of interest is first segmented out from the rest of the scene. We address the problem by assuming the availability of a prior CAD model, roughly resembling the object to be reconstructed. This assumption almost always holds in applications such as industrial inspection or reverse engineering. With aid of this prior acting as a proxy, we propose a fully enhanced pipeline, capable of automatically detecting and segmenting the object of interest from scenes and creating a pose graph, online, with linear complexity. This allows initial scan alignment to the CAD model space, which is then refined without the CAD constraint to fully recover a high fidelity 3D reconstruction, accurate up to the sensor noise level. We also contribute a novel object detection method, local implicit shape models (LISM) and give a fast verification scheme. We evaluate our method on multiple datasets, demonstrating the ability to accurately reconstruct objects from small sizes up to 125m3.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘链接:https://pan.baidu.com/s/1mkaL01q
密码: 2vku
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



