推荐!【F16模型:符号系统、模型提取、异常检测和形式化方法】《利用符号表示实现安全可靠学习》美空军2022最新107页技术报告
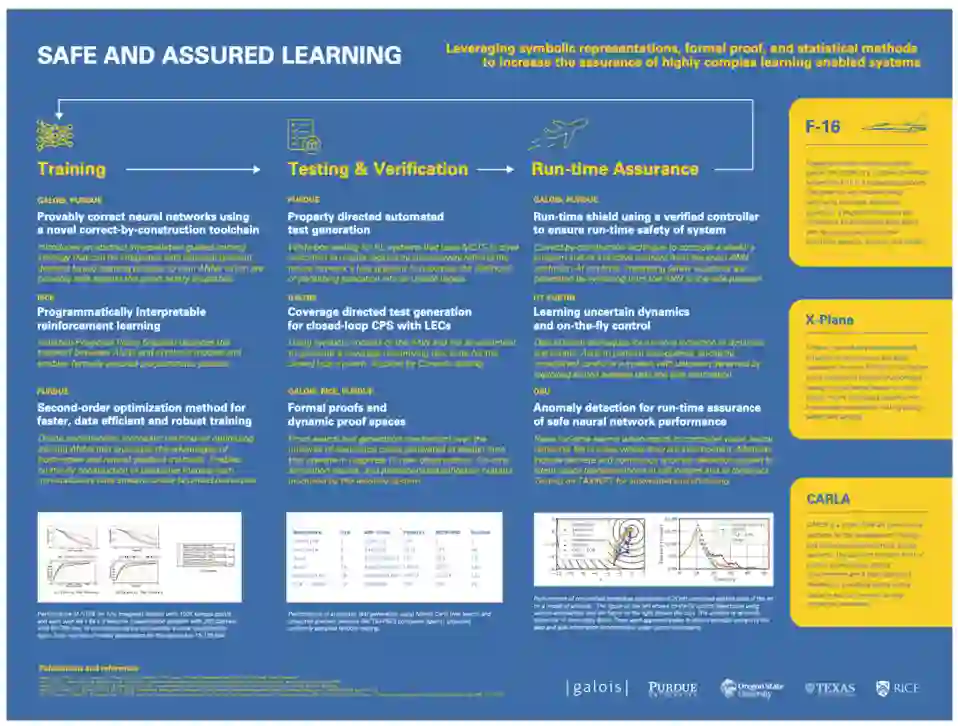
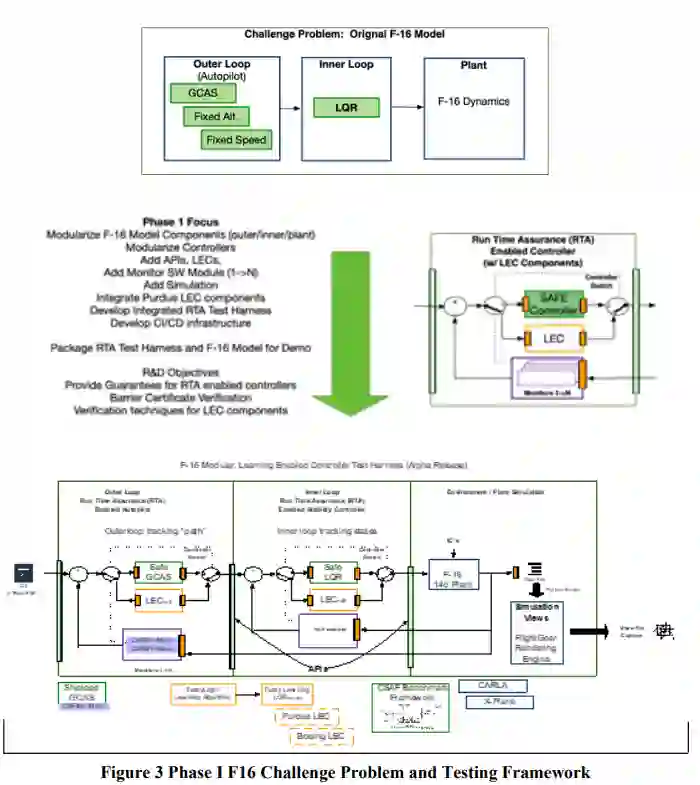
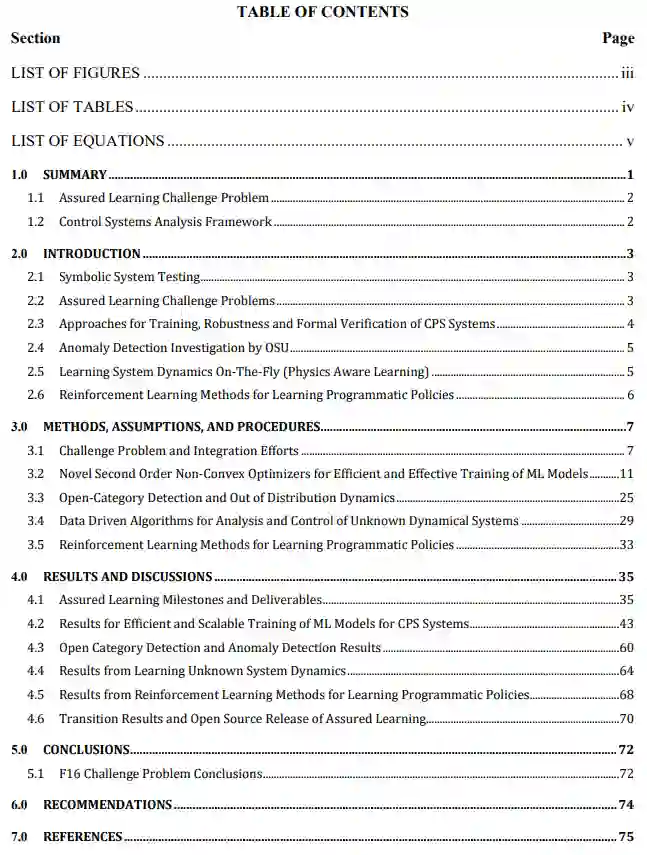
1.1 可靠学习挑战问题
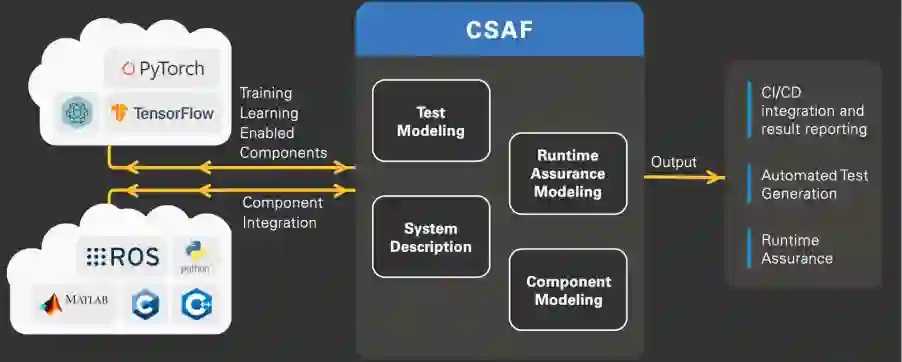
1.2 控制系统分析框架
2 引言
2.1 符号系统测试
2.2 可靠学习挑战问题
2.3 CPS系统的训练、鲁棒性和形式验证的方法
2.4 OSU的异常检测调查
2.5 实时学习系统动力学(物理感知学习)
2.6 学习程序性政策的强化学习方法

专知便捷查看
便捷下载,请关注专知人工智能公众号(点击上方关注)
点击“发消息” 回复 “CSAF” 就可以获取《推荐!【F16模型:符号系统、模型提取、异常检测和形式化方法】《利用符号表示实现安全可靠学习》美空军2022最新107页技术报告》专知下载链接


登录查看更多
相关内容
专知会员服务
136+阅读 · 2022年11月23日
专知会员服务
56+阅读 · 2022年11月2日
Arxiv
0+阅读 · 2022年12月30日

相关VIP内容
专知会员服务
136+阅读 · 2022年11月23日
专知会员服务
56+阅读 · 2022年11月2日
相关资讯
相关论文
Arxiv
0+阅读 · 2022年12月30日