美国海军陆战队正在探索使用人机协作来控制前线部署环境中的无人驾驶航空系统(UAS),其任务范围广泛,包括情报、监视和侦察(ISR)、电子战(EW)、通信中继和动能杀伤。美国海军陆战队设想使用未来的垂直起降平台(VTOL)来支持混合战争任务并实现军事优势。对于美国海军陆战队的混合战争应用,以实现任务优势和战争主导权,美国海军陆战队需要了解VTOL机组和无人机系统之间错综复杂的人机互动和关系,以获得战斗空间态势感知,并有效地计划和执行针对常规和不对称威胁的旋转翼行动。这项研究的重点是美国海军陆战队在海洋环境中的打击协调和侦察(SCAR)任务,以促进远征基地先进作战(EABO)在沿岸地区。有多种复杂的功能必须加以考虑和评估,以支持人机协作互动,提高任务的有效性:任务规划、移动和渗透、区域侦察、侦察战斗交接和过渡。
这份顶点报告探讨了SCAR任务期间三个系统之间的人机协作:UAS、VTOL和地面控制站(GCS)。该研究从VTOL项目的文献回顾开始,研究了美国海军陆战队SCAR任务战术和用于促进EABO的理论概念。此外,它还包括对自主性和自动化、人工智能和机器学习的研究。通过使用合作设计模型来探索这三个系统的人机协作互动和过程,文献回顾探讨了如何使用基于三个因素的相互依赖性分析(IA)框架来确定人类执行者和机器团队成员之间的相互依赖性:可观察性、可预测性和可指导性。
通过基于模型的系统工程(MBSE)工具,将SCAR任务的高级功能分解为分层次的任务和子任务,系统分析被用来支持联合设计方法。根据Johnson(2014)的说法,合作设计方法研究了相互依赖的概念,并使用IA框架作为设计工具。IA框架捕捉了主要执行者和支持团队成员之间的互动,以发展支持每个主要任务和分层子任务的所需能力,从而产生HMT要求。这份顶点报告分析了两种选择。第一个方案认为UAS是主要执行者,VTOL和GCS是辅助团队成员。第二种方案认为VTOL是主要执行者,UAS和GCS是辅助团队成员。基于这两种选择,IA框架评估了17个主要任务、33个分层子任务和85个执行SCAR任务的所需能力。
此外,研究发现需要一个强大的数字任务规划系统,如升级后的海军陆战队规划和行动后系统(MPAAS),通过存储以前的任务和经验教训的数据来促进机器学习。美国海军陆战队将面临无人机系统的处理能力和信息存储方面的挑战。应尽一切努力增加UAS的处理能力。必须实施一个有效的主要、备用、应急和紧急(PACE)通信计划,以确保UAS、VTOL和GCS之间所有通信平台的冗余。美国海军陆战队必须实施支持信任、提供快速反馈和简单操作的接口。
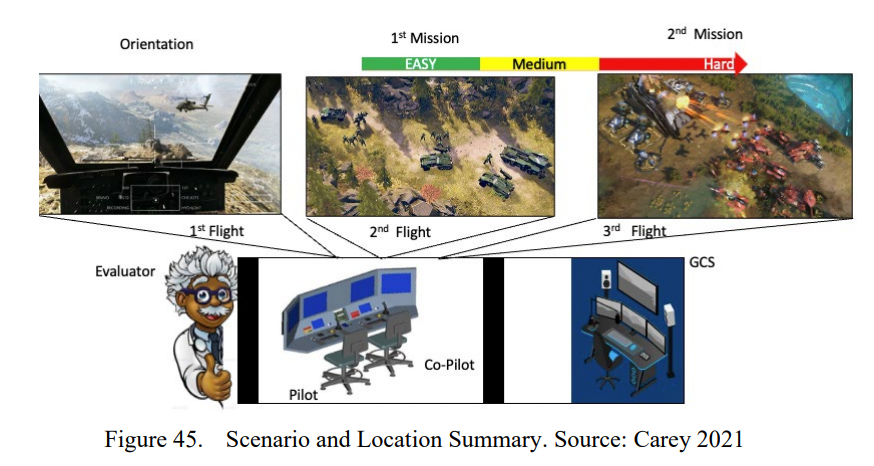
最后,为了准确评估VTOL、UAS和GCS之间的HMT要求,顶点报告促成了一个探索性实验的发展,该实验将在海军研究生院(NPS)建模虚拟环境和模拟(MOVES)实验室使用,以促进未来的研究。制定了操作要求和测量方法,以确定HMT要求的有效性。
这项顶点研究为在SCAR任务中执行VTOL/UAS混合行动的人机互动复杂性提供了明确的证据。该顶点研究确定了使用系统分析和协同设计作为一种有效的方法,通过IA框架促进人机协作需求的发展。此外,该研究确定了对复杂的自主性和技术准备程度的需求,这可能是目前还没有的。顶点建议美国海军陆战队继续研究人机协作,并利用SCAR任务探索性实验来进一步完善和研究VTOL/UAS的高级系统要求,以支持具有前沿部署的UAS的混合行动,重点是实现4级自主权。