摘要
本报告介绍了对动态数据驱动应用系统(DDDAS)异常检测和响应的研究,以建立抗攻击的多智能体系统。报告涵盖了2019年1月至2021年11月期间的情况。除了之前报告中介绍的成就,我们还展示了一些关于所述策略实际执行的新结果,以及完成项目所有活动所需的最后细节。由于Covid-19大流行病,封锁阻碍了实验室的工作,不被允许雇用研究生研究助理,项目要求延期,并在2020年11月获得批准。大学在2021年第二学期开放了实验室,当时能够雇用四个本科生研究人员。因此,所有的活动都是由这些本科生、三名研究生和两名主要研究人员制定的。
这份最终报告的组织结构如下:
(i) 第一节总结了项目的目标和活动,到目前为止取得的进展,所需要素的购买情况,以及书面论文的清单。
(ii) 第二节介绍了一些与所制定的战略共同的初步情况。
(iii) 第3节介绍了开发的方法和实验结果。
(iv) 第4节提出了一种新颖的离散时间种群动力学来实现机器人的编队。
(v) 第5节介绍了所开发的策略的发展和进一步的实际执行情况,以供测试。
(vi) 最后,第7节介绍了所开发工作的最终结论。
1 引言
具有多个智能体的系统使我们能够开发不同的策略来控制大规模的互连系统。与有单个智能体的系统相比,有多个智能体的系统可以更容易和更快地完成监视等任务。对这类系统的研究使我们能够对动物和人类的行为进行建模,并根据这些行为设计控制策略。这种策略从基于鸟群和蜜蜂觅食的算法[1],沿网络的分布式传感[2],延伸到耦合振荡器的同步[3],等等[4,5]。
进化博弈论对生物种群有重要的启发作用,当与物理系统适当结合时,博弈论可以优化系统行为。这种理论的使用允许为不同的应用设计分布式控制器,如水系统的控制[6],或孤立的微电网的同步[3]。大多数提出的问题解决方案都采用连续时间的方法。然而,为了在一些系统上正确实施这些策略,需要有离散时间控制器。即使连续时间控制器是稳定的,离散化也可能变得不稳定。因此,必须发展理论结果以确保离散时间控制器是稳定的。
除了提到的离散化问题,控制器和系统还面临另一个问题,因为它们很容易受到攻击。恶意智能体可以修改系统信息以损害用户和物理工厂。在多智能体系统中,对一个智能体的攻击可以渗透到整个系统中,因为它向其余的智能体发送了损坏的信息。此外,攻击者可以修改一个智能体发送给其邻居的信息。对真实系统的一些攻击表明,有必要开发一种自动反应来面对其影响[7, 8]。
该项目解决了上述问题,即使用离散时间群体动力学的系统控制和缓解对控制系统的攻击。因此,本项目所取得的贡献可以概括为以下几点。首先,我们开发了一种策略来检测和缓解对系统智能体之一的传感器的攻击。该策略减轻了对被攻击智能体的影响,并防止攻击通过通信网络传播到整个系统。第二,我们设计了一个使用新的离散时间群体动力学来优化凸函数的策略。我们开发了理论结果以确保系统的稳定性。这一新颖的发展使我们能够设计一个控制器来实现机器人的编队。第三,我们开发了一个基于软件定义的网络(SDN)的策略,以减轻对通信链路的攻击。我们说明,使用SDN为网络物理系统提供了不同的能力,以减轻智能体之间的通信攻击。最后,我们不仅模拟,而且还在一个有多个差动驱动机器人的系统上实施了上述的一些策略,以显示其效率。
1.1 目标和活动
为无人驾驶地面车辆(UGVs)设计并实现一个能够减轻对传感器读数攻击的编队控制器。这项工作的重点是至少有三个机器人的编队,并限于完整性和重放攻击。
之前所说的目标可以在以下具体目标中分开:
-
开发一个编队控制器,用于几个UGV,即三到六个机器人,以及至少三个几何编队分布。
-
开发一种能够检测机器人传感器异常情况(攻击/失败)的机制。
-
开发至少一种机制,能够协调测量值和估计值,并计算控制行动所需的调整,以减轻异常情况对机器人编队的影响。
-
开发一个机制的性能指数,以量化当缓解机制被添加到编队控制器中时攻击的影响的减少。
为了实现这些目标,我们在项目提案中陈述了以下活动:
(i) 设计和实现编队队长的控制器。
(ii) 设计和实现缓解对编队领导的路径跟踪任务的攻击的机制。
(iii) 选择要探索的编队集合,即定义每个编队的机器人数量和几何形状(至少有三种情况)。
(iv) 为三个机器人系统的每个编队中的跟随者机器人设计和实现控制器。
(v) 开发机制,以检测由领导者发送和/或由两个追随者接收的信息的异常情况(被攻击的信息可能是不同的)。
(vi) 开发机制以减轻攻击对编队中两个跟随者机器人的影响。
(vii) 在一次专门会议上发表部分成果。该出版物将包括缓解对一个有三个机器人的编队中的领导者和追随者机器人的攻击。
(viii) 设计和实现六个机器人的多智能体系统中的领导者和跟随者的编队控制器。
(ix) 开发机制,以检测有六个智能体的系统中由领导者发送和/或由追随者接收的信息的异常情况(在攻击下可能是不同的)。
(x) 为六个智能体和不同的队形形状扩展缓解机制。
(xi) 定义一个性能指数,以量化受攻击系统和包括缓解机制的受攻击系统之间的差异。
(xii) 在专业期刊上发表最终结果。
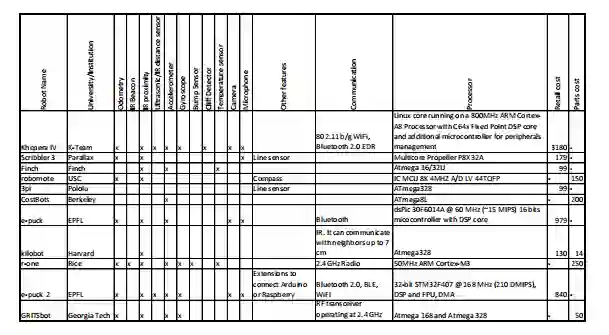
图1:不同移动地面机器人平台的比较。EPFL是洛桑联邦理工学院,USC是南加州大学。改编自[9]。
1.2 基础硬件
为了完成上述活动,我们已经购买了一些硬件。图1显示了不同研究小组制造的一些机器人的主要特征。尽管有些机器人如Khepera IV呈现出许多功能,但这些机器人的价格很高,或者它们没有商业化的供应。因此,我们选择了e-puck第2版;它有足够的功能来开发目前的工作,其价格允许我们用现有的预算购买几个机器人。
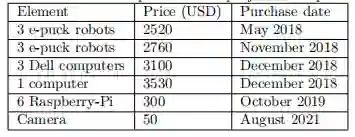
我们总共购买了六个地面机器人,一台高性能的和三台中等大小的计算机。表1显示了每个部件的不含税成本。机器人的价格是不同的,因为它们是在不同的日期购买的。此外,为了实现机器人的分布式通信,购买了6个树莓派,为了检测机器人的位置,还购买了一个摄像头。作为项目的对应方,博士生Luis Francisco C´ombita在2015年获得Colciencias 727资助的预算中的一些资源被用来购买项目用品,以及博士生Jorge Alfredo Lopez Jimenez的一些预算资源。Colciencias是哥伦比亚相当于国家科学基金会(NSF)的机构。
表1:为项目发展所获得的要素