智能汽车转向轮转角主动控制 | 厚势汽车

厚势按:研究通过对智能汽车转向系统进行主动控制,可靠并准确地得到期望的转向轮转角。为了提高智能汽车转向系统主动控制的可靠性、安全性,借助横摆角速度信号、侧向加速度信号和转向执行电动机电流信号,基于卡尔曼滤波的方法对转向管柱转角传感器进行实时故障诊断和容错设计。
根据诊断和容错结果,并考虑执行器力矩受限的情况,基于一种条件积分方法,设计前馈加抗积分饱和的状态反馈控制算法,使转向轮转角渐进稳定到期望的转向轮转角。并且通过建立李雅普诺夫函数,证明控制系统的渐进稳定。通过实车试验证明结合故障诊断和容错设计后控制算法能够有效可靠地实现转向轮转角的精确跟踪控制。
本文来自 2017 年 07 月 20 日出版的《 机械工程学报 》,为国家自然科学基金的资助项目(51475333),作者是同济大学汽车学院和同济大学智能型新能源汽车协同创新中心的章仁燮博士、熊璐教授和余卓平教授。
0. 前言
智能车成为近年来的研究热点,线控转向系统作为智能车重要的执行器之一:通过电动机主动控制转向轮转角来实现期望的转向轮转角。由于可靠性、安全性问题,线控转向系统目前还没有大量应用与产品车,目前只有个别公司向市场推出了线控转向汽车,如日产的 Q50。
传统的 PD 控制技巧被广泛用于使车辆方向盘转角接近期望的方向盘转角 [1-3]。 MARUMO 等 [4-5] 在 PD 控制的基础上,基于状态反馈框架,利用 LQ 优化控制方法,使转向轮转角跟踪期望转角。 虽然状态反馈控制能够保证被控状态在系统的平衡点附近保证稳定,但是不能保证系统在受到参数不确定的条件下仍能保证跟踪误差收敛。
YAMAGUCHI 等 [6] 通过对前轮侧偏刚度估计,应用自适应控制的方法实现转向轮转角的跟踪控制,但是其预测估计方法是基于轮胎特性在较好线性区。 CETIN 等 [7] 和 BAVISKAR 等[8]采用了对转向机构的不确定参数进行辨识的自适应控制方法。但其在不同路况下的估计准确性有待考察。
滑模控制方法 [9-13] 被应用在转角控制,从其结果看滑模控制对于参数的不确定性和路况的改变有相当的鲁棒特性,但是从试验数据可以看出电动机力矩输出抖振相当明显。其次,大多数都是基于台架试验,没有考虑到实际车辆在运动过程中回正力矩的影响。
除此以外,为了提高主动转向的安全性和可靠性,传感器的故障诊断必不可少。
俄亥俄大学的 PISU [14] 设计了一种自适应阈值故障诊断方法。该诊断算法具相对于传统固定阈值诊断算法具有更好的鲁棒性和应用性。王祥等 [15] 运用带有遗忘因子的递推最小二乘法,提出了一种电控转向系统直流电机故障诊断方法。吉林大学的宗长富教授等 [16] 建立了一个基于电动机模型和自适应卡尔曼滤波的实时故障诊断算法,诊断结果用来判断是否进行容错控制。但是,这类算法主要在基于台架试验,并没有在实车上进行验证,以及并没有讨论如何应用于转向轮转角主动控制。
本文考虑到智能汽车,能同时存在有人驾驶的助力转向功能和无人驾驶的主动转向功能,本文借助 EPS 助力转向系统对转向轮转角进行主动控制。通过发送需求力矩给助力电动机控制器(控制器内部程序通过重新刷写,在保有原 EPS 控制算法的同时,能够切换为主动发送力矩请求指令的转向轮转角主动控制), 助力转向电动机控制器再向助力电动机发出力矩请求,使助力电动机产生相应的力矩,来实现线控转向。
考虑到智能车辆相比传统车拥有多个传感器(如横摆角速度传感器,侧向加速度传感器等),为了提高反馈控制的可靠性、安全性,借助横摆角速度信号、侧向加速度信号和转向执行电动机电流信号,基于卡尔曼滤波的方法对转向管柱转角传感器进行实时故障诊断和容错设计。
根据故障诊断和容错设计的结果,提供一个可靠的容错转角。并基于一种条件积分方法 [16],考虑执行器力矩受限的情况,设计前馈加抗积分饱和的状态反馈控制算法,来实现期望的转向轮转角。通过建立李雅普诺夫函数,证明转向轮转角跟踪控制的渐进稳定。最后通过实车试验,实现了线控转向系统转向角主动控制。
1. 被控对象
1.1 转向系统表达式
本文研究对象是齿轮齿条式的转向系统,驱动电动机作用于转向管柱上,来控制转向系统转向轮转角,如图 1 所示。
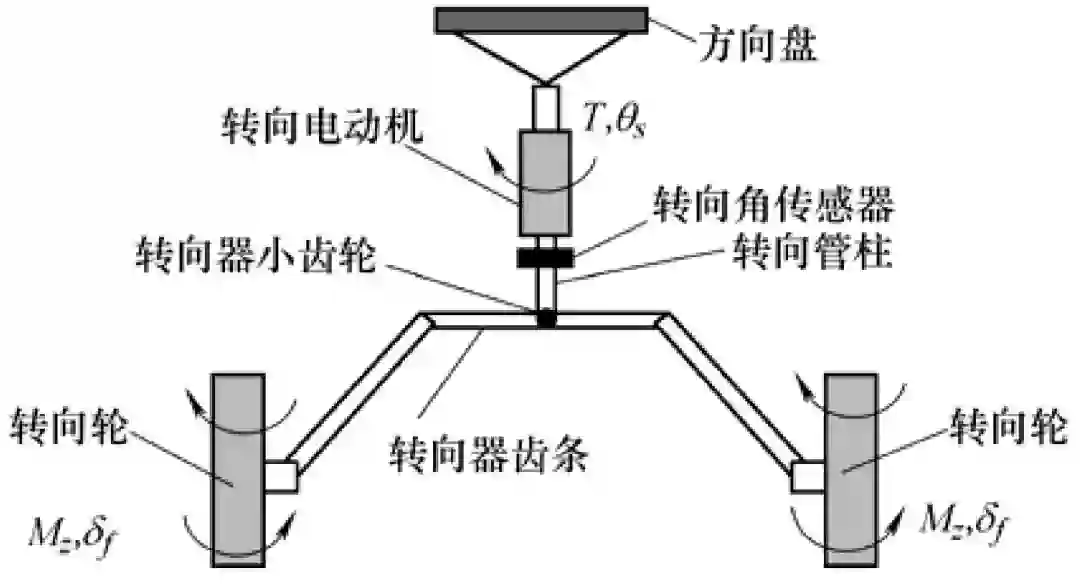
图 1 转向系统示意图
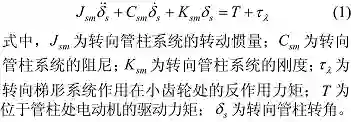
首先,将驱动电动机到转向器小齿轮的转向管柱系统的动力学方程表示为:
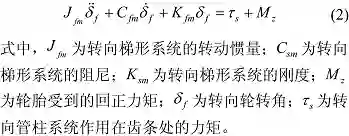
其次,将从转向器小齿轮到车辆转向轮转角的转向梯形系统的动力学方程表示为:
假设齿轮齿条之间的连接为刚性连接,可以得到转向管柱转角与转向轮转角之间的关系以及转向管柱转角速度与转向轮转角速度之间的关系:

式中, k_s 表示转向器的传动比。
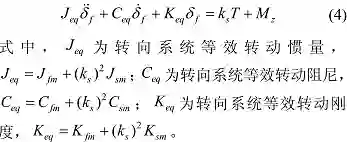
因此通过式 (1)、 (2) 可以得到转向系统等效动力学方程表达式:
1.2 车辆模型表达式
根据线性二自由度车辆模型,如图 2 所示。其运动方程如下:
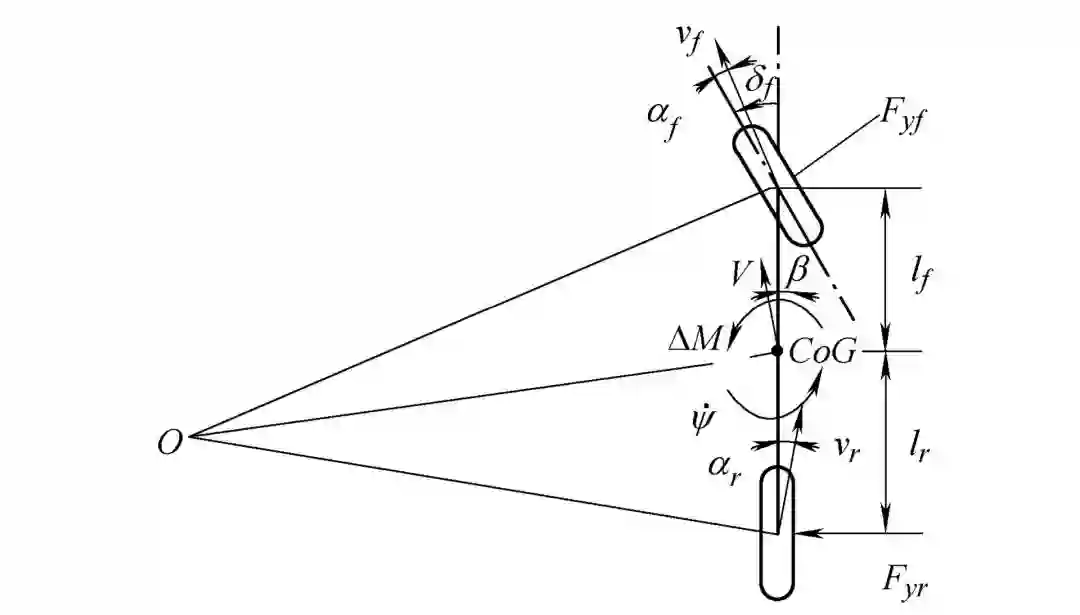
图 2 二自由度车辆模型
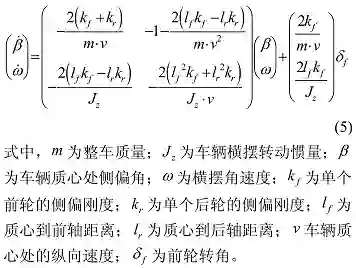
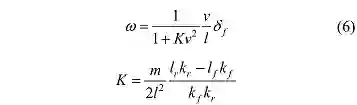
根据线性二自由度车辆模型可得横摆角速度稳态响应增益,表达式为:
得到车辆受到的侧向加速度 a_y 与转向轮转角在稳态时的对应关系:

根据式 (7) 得到转向轮受到侧向力F_yf 表达式:

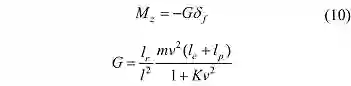
同时,根据车辆运动学特性,得到在常规工况下的回正力矩 M_z 估计表达式:

式中, l_e 为由于主销后倾角产生的侧向作用力与主销之间的距离, 记为主销后倾拖距; l_p 为轮胎拖距;F_yf 为转向轮受到的侧向力;轮胎拖距 [15],l_p = l_L 为轮胎接地印迹面长度。
将式 (8) 代入式 (9) 可以得到回正力矩在稳态时的表达式:
2. 控制策略
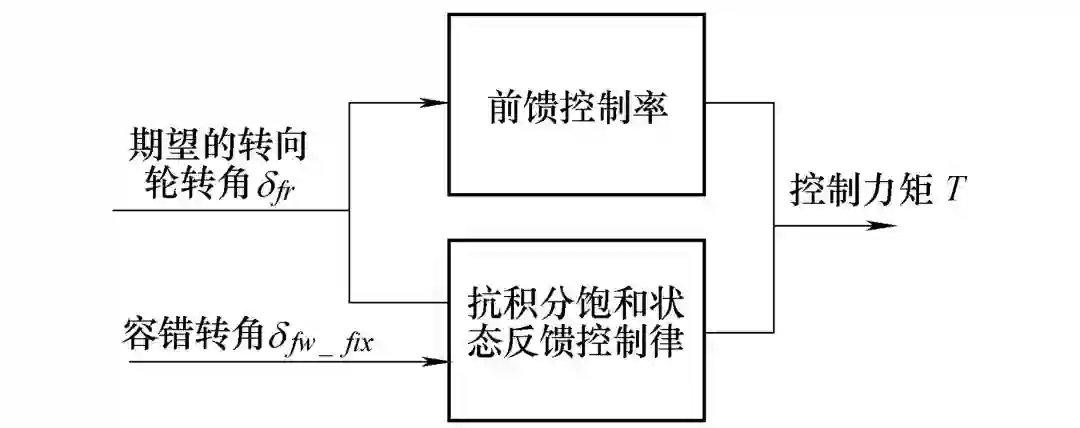
整个控制框架分为两部分组成:基于卡尔曼滤波的转角传感器故障诊断以及前馈加抗积分饱和的状态反馈控制算法,见图 3 所示。前者对传感器信号进行诊断并给出容错后的转角信息以提高主动控制的安全性和可靠性,后者根据容错后的转角信息控制转向系统以实现期望的转向轮转角。
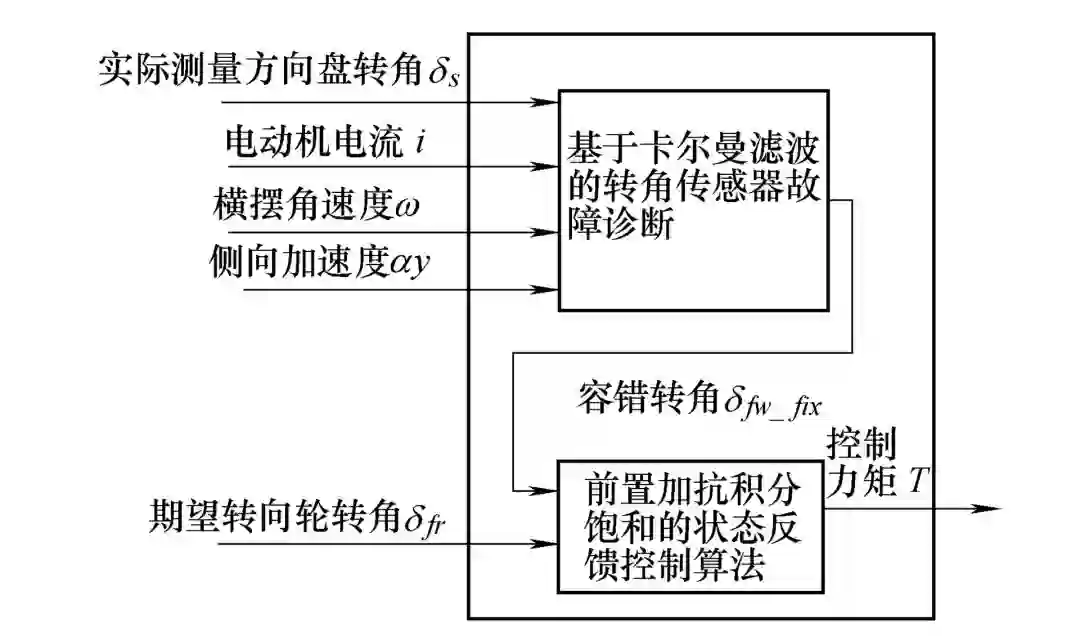
图 3 控制框架
2.1 转向管柱转角传感器故障诊断
转角传感器的故障诊断流程由两部分组成:故障信息提取和故障识别,见图 4 所示。
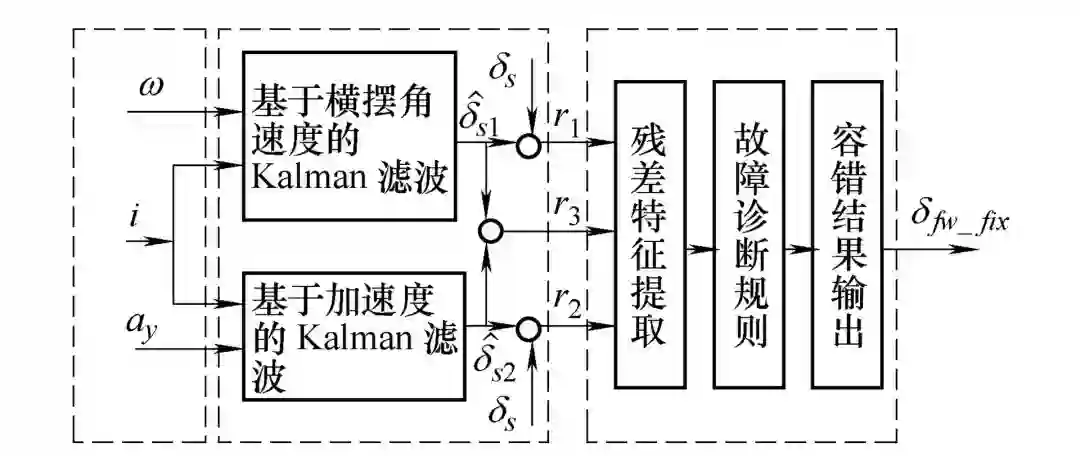
图 4 转角传感器故障诊断流程图
2.1.1 故障信息提取
分别由基于横摆角速度 ω 和执行电动机电流 i 的卡尔曼滤波状态估计得到的管柱转角信号 δ^_s1 , 以及基于侧向加速度 a_y 和执行电动机电流 i 的卡尔曼滤波状态估计得到的管柱转角信号 δ^_s2 。
(1) 基于横摆角速度 ω 和执行电动机电流 i 的卡尔曼滤波状态估计
根据式 (4) 得到执行电动机的离散状态方程:

其次,根据式 (7) 得到横摆角速度的观测方程:
(2) 基于侧向加速度 a_y 和执行电动机电流 i 的卡尔曼滤波状态估计
首先所需要的执行电动机的离散状态方程同式 (12)。
其次,根据式 (8) 得到侧向加速度的观测方程:
(3) 卡尔曼滤波时间更新方程和状态更新方程
根据卡尔曼滤波原理得到时间更新方程:

状态更新方程:
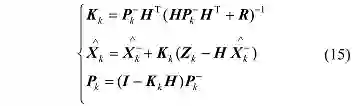
式中, H 为观测模型矩阵; P_k- 为先验估计误差协方差矩阵;P_k 为后验估计误差协方差矩阵; Q 为过程噪声协方差矩阵; R 为测量噪声协方差矩阵; I 为阶单位矩阵; K_k 为卡尔曼增益或混合因数,作用是使后验估计误差协方差最小。
因此基于状态方程式 (11) 和横摆角速度观测方程式 (12),通过卡尔曼滤波得到转向管柱转角在 k 时刻的估计值 δ^_s1。
基于状态方程式 (11) 和侧向加速度观测方程式 (13),通过卡尔曼滤波得到转向管柱转角估计值 δ^_s2。
2.1.2 故障识别
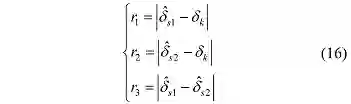
(1) 残差特征提取
基于转向管柱转角估计值 δ^_s1 和 δ^_s22 ,和 k 时刻传感器测得的转向管柱转角数值 δ_k,可以得到三组残差:
(2) 故障诊断规则
通过设定三个残差阀值 z1, z2, z3,可以得到一个 1 × 3 的故障特征矢量 (S1, S2, S3):

式中, i = 1, 2, 3,故障特征矢量 (S1, S2, S3) 反映着传感器的故障信息。由于两个传感器同时发生故障的概率非常小,所以认为,要么转角传感器发生故障,要么另外两个传感器中有一个故障。所以诊断逻辑为:

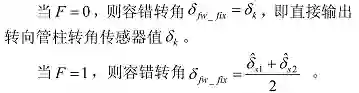
式中, F 代表转角传感器工作状态, 1 表示出故障,0 表示正常。
(3) 容错输出
2.2 转向轮转角跟踪控制算法
在获得可靠的转向管柱的容错转角后,条件积分的方法被用于主动控制转向系统,使其转向轮转角准确地满足期望的转角值。
根据式 (4) 得到一般表达形式:
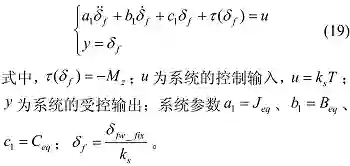
考虑到系统参数误差,系统 (19) 转换为:

式中, a0、b0、c0 分别为转向系统等效转动惯量,等效转动阻尼和等效转动刚度的测量误差除以 k_s ,认为误差有界:
控制律由前馈控制律 u_f 和状态反馈的控制律 u_b 构成,见图 5,即
5 控制算法框架
2.2.1 前馈控制律设计
首先根据系统 (21) 得到在平衡点处的前馈控制律:
2.2.2 抗积分饱和状态反馈控制律设计
考虑到引入积分运算时,系统受到外部干扰,建模不精确以及执行器力矩受限等因素影响,长时间无法镇定系统会导致积分运算不断增大,从而导致控制算法失效,进一步损害系统瞬态响应甚至是稳定性。因此,状态反馈控制律的设计是基于一种条件积分方法 [17],并考虑到控制量 u 的取值范围:

其中,T_max 为电动机受限的最大驱动力矩。
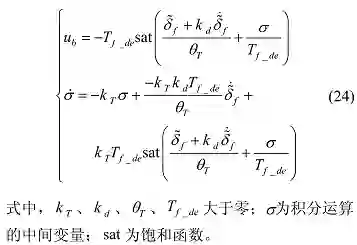
首先令
那么状态反馈控制律可以由式 (24) 表示:
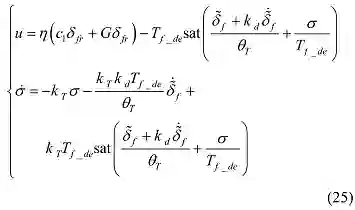
因此,基于前馈控制律式 (23) 和反馈控制律式 (24),控制律式 (24) 可以表示为:
2.2.3 稳定性分析
条件积分方法其本质是为防止积分运算饱和的状态反馈控制。因此系统稳定性将从积分运算未饱和、饱和两方面进行分析。
首先令

(1) 积分运算未饱和
当积分运算未饱和, | s | < 1 。所设计的控制律为引入积分项的状态反馈控制,能够保证系统的状态 δ_f 被镇定到原点。
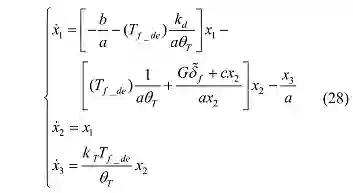
控制律式 (25) 可被转换为:
1) 系统方程变换:
2) 系统渐进稳定证明,首先建立李雅普诺夫函数:
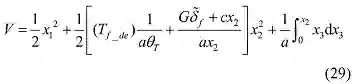
从式 (29) 可知 V(0) = 0;当 X ≠ 0 时, V(X) > 0 。再证明李雅普诺夫函数一阶导数小于零。对式 (29) 求一阶导数可以得到李雅普诺夫函数的变化率:
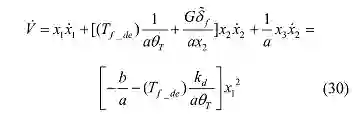
所以可知 V(0) 的导数 = 0;当 X ≠ 0 时,V 的导数 < 0 。因此系统式 (28) 渐进稳定,能够保证 δ~f 收敛到零。
(2) 积分运算饱和
当积分运算饱和时,积分运算不发散,保证系统仍然稳定。
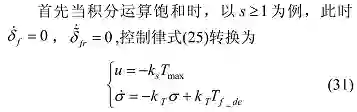
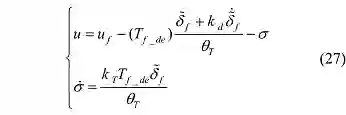
从式 (31) 可以发现控制量达到执行器所能达到的最大限制值时,σ 值会收敛于 T_(f_de),保证原有的积分值稳定不发散。
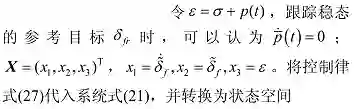
同理当 s ≤1 时,控制律式 (25) 转换为:
3 实车试验
试验平台是基于如图 6a 所示的轮毂/轮边电驱动汽车平台。通过发送需求力矩给助力电动机控制器,助力转向电动机控制器再向助力电动机发出力矩请求,使助力电动机产生相应的力矩来实现利用助力转向系统实现线控的目的。通过图 6b 所示的惯性导航得到所需要的车辆横摆角速度信息和侧向加速度信息。
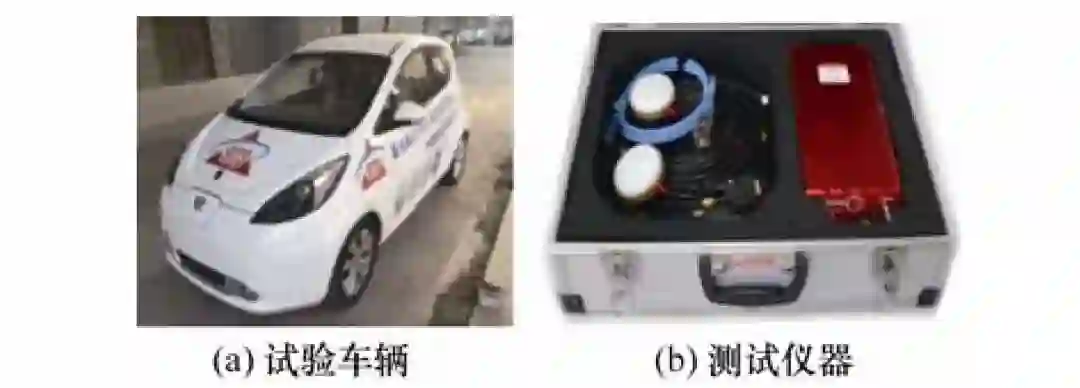
图 6 试验平台示意图
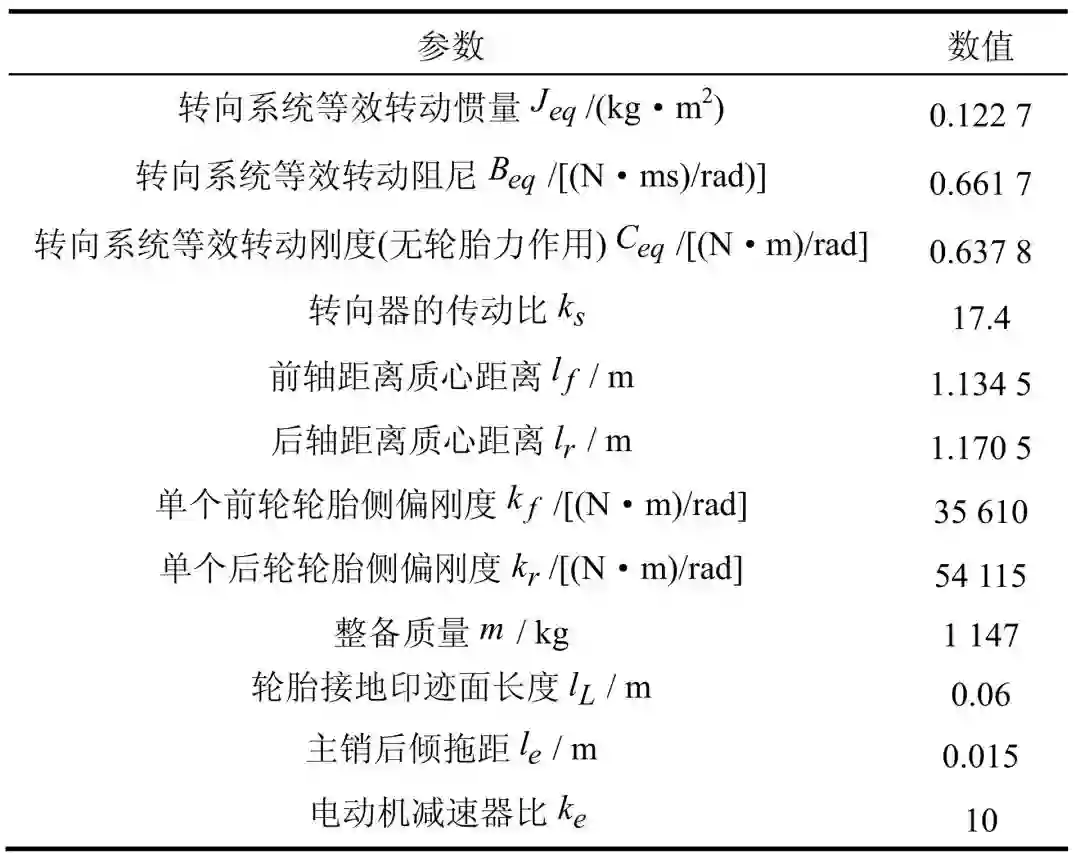
车辆参数如表 1 所示。
表 1 车辆参数
试验分别从两方面进行验证:基于卡尔曼滤波的转向管柱转角估计的正确性和转向轮转角跟踪控制的准确性。
3.1 基于卡尔曼滤波的转向管柱转角估计
(1) 传感器转角信号无错误时,转角估计的有效性验证
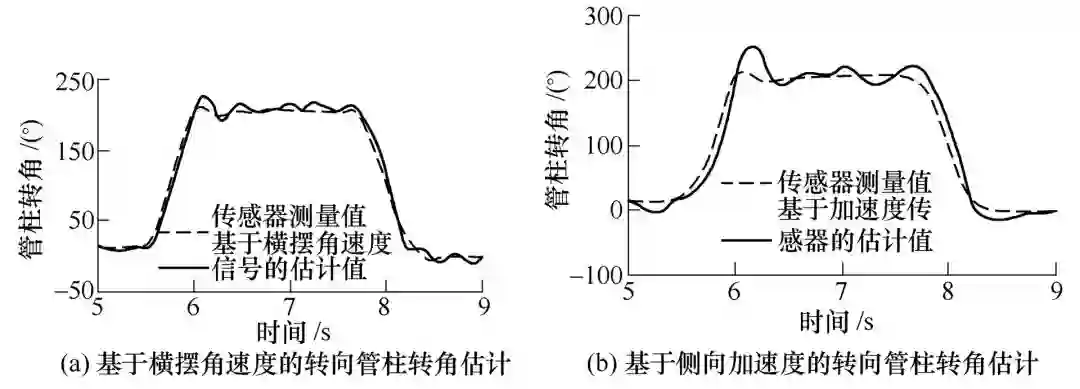
图 7 转向管柱转角估计
通过使转向盘转角从 0° 维持在 200° 再回到零度,来验证在传感器转角信号无错误时,基于卡尔曼滤波的转向管柱转角估计值的正确性。
从图 7 中可以看出通过卡尔曼滤波可以比较好地估计转向管柱转角信号,转角估计值误差平均在 10° 以内。由于加速度信号本身波动比较大,导致基于加速度的转角估计值相比基于横摆角速度的转角估计值效果差些,因此为了防止误报,适当增大 z2 阀值。
(2) 传感器转角信号有错误时,转角估计的有效性验证
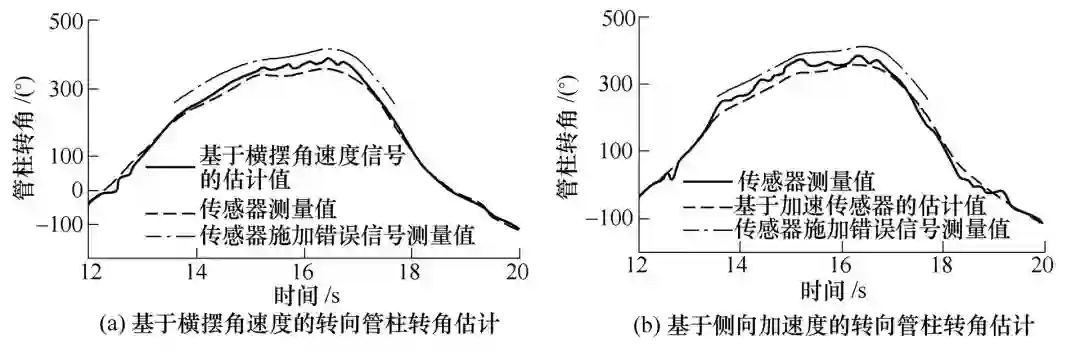
图 8 转向管柱转角估计
通过人为对传感器增加误差的方法,来考察基于卡尔曼滤波的转角估计值容错的有效性,在管柱转角在 200° 后施加 50° 的转角误差,见图 8 中的虚线所示。
从图 8 中可以发现无论是基于横摆角速度的转向管柱转角估计值还是基于侧向加速度的转向管柱转角估计值在误差介入前都能符合传感器的正确值。在施加误差后,虽然不能完全符合正确值,但是相比错误的传感器信号,经过卡尔曼滤波后的转向管柱转角估计值更接近正确值,因此基于卡尔曼滤波的转向管柱转角估计值可以提供有效的容错转角。
3.2 转向轮转角控制验证
为了体现转向轮转角跟踪控制的效果,分别通过稳态圆周运动工况和瞬态蛇形工况来验证转向系统稳态和瞬态的跟踪特性。
(1) 稳态圆周运动工况
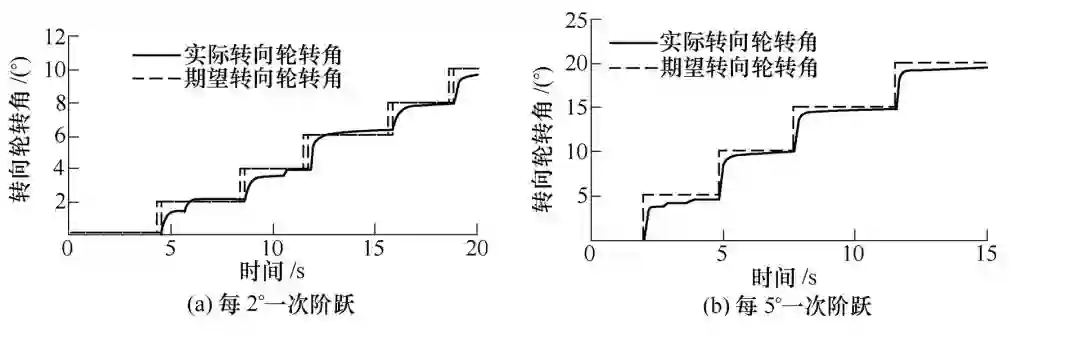
图 9 稳态圆周工况转向角跟踪示意图
由于试验场地原因, 车速局限在 20 km/h 左右。试验中期望转向轮转角为每 2°一次阶跃直到 10°,见图 9a;每 5°一次阶跃直到 20°,见图 9b。
从图 9 可以看出线控转向系统跟踪稳态期望信号的能力。其平均稳态误差为 0.1°,平均上升时间为 0.3 s。因此通过试验证明线控转向系统能够准确并快速地跟踪稳态的期望转向轮转角。
(2) 瞬态蛇形工况
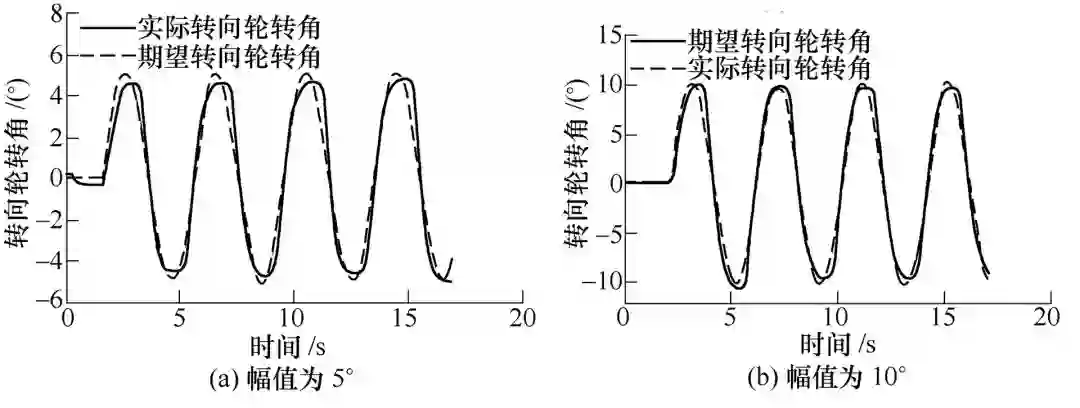
图 10 周期 4s 蛇形工况转向角跟踪示意图
同样由于试验场地原因,车速局限在 20 km/h左右。试验中期望转向轮转角为周期 4 s(图 10),幅值分别为 5°(图 10a)、 10°(图 10b)。
图 10 验证了线控转向系统跟踪瞬态期望信号的能力,其平均幅频特性为 0.95,平均相频特性为−0.312 58 rad。因此通过试验证明了线控转向系统能够快速地跟踪时变的期望转向轮转角。
4. 结论
借助横摆角速度信号、侧向加速度信号和转向执行电动机电流信号,基于卡尔曼滤波的方法对转向管柱转角传感器进行实时故障诊断和容错设计,提高了智能汽车转向系统线控的安全性和可靠性。
结合了故障诊断和容错设计的结果,基于一种条件积分方法,设计了前馈加抗积分饱和状态反馈的控制律。防止了由于状态反馈引入了积分运算,在执行器力矩受限的情况下,导致积分饱和引起的性能恶化,保证转向轮转角跟踪的稳定性。
通过实车试验考察了故障诊断验证值的正确性和转向管柱转角控制算法的准确性。结果证明,通过所设计的控制策略,转向系统能够可靠,准确并快速地跟踪期望的转向轮转角。
参考文献
[1] BERTOLUZZO M, BUJA G, MENIS R. Control schemes forsteer-by-wire systems[J]. Industrial Electronics Magazine IEEE , 2007 , 1(1):20-27
[2] KIM C. J , JANG J. H , OHS. K , et al. Development of a control algorithm for arack-actuating steer-by-wire system using road information feedback[J].Proceedings of the Institution of Mechanical Engineers Part D Journal ofAutomobile Engineering , 2008 , 222(9):1559-1571
[3] SETLUR P , WAGNER J R , DAWSON D M , et al. A trajectorytracking steer-by-wire control system for ground vehicles[J]. VehicularTechnology IEEE Transactions on , 2006 , 55(1):76-85
[4] MARUMO Y , NAGAI M . Steering control of motorcyclesusing steer-by-wire system[J]. Vehicle System Dynamics , 2007 , 45(45):445-458
[5] MARUMO Y , NAGAI M . Control effects of steer-by-wire systemfor motorcycles on lane-keeping performance[J]. Vehicle System Dynamics , 2011,49(8):1283-1298
[6] YAMAGUCHI Y , MURAKAMI T. Adaptive control for virtualsteering characteristics on electric vehicle using steer-by-wire system[J].Industrial Electronics IEEE Transactions on, 2009 , 56(5):1585-1594
[7] CETIN A E , ADLI M A , BARKANA D E , et al. Implementationand development of an adaptive steering-control system[J]. Vehicular TechnologyIEEE Transactions on, 2010 , 59(1):75-83
[8] BAVISKAR A , WAGNER J R , DAWSON D M , et al.An adjustable steer-by-wire haptic-interface tracking controller for groundvehicles[J]. IEEE Transactions on Vehicular Technology, 2009 , 58(2):546-554
[9] WANG H , MAN Z , KONG H , et al. Terminalsliding mode control for steer-by-wire system in electric vehicles[C]//Industrial Electronics and Applications. IEEE ,2012:919-924
[10] WANG H , KONG H , MAN Z ,et al. Sliding mode control for steer-by-wire systems withAC motors in road vehicles[J]. IEEE Transactions on Industrial Electronics , 2014, 61(3):1596-1611
[11] WANG H , MAN Z , SHEN W , et al. Robust slidingmode control for steer-by-wire systems with AC motors in road vehicles[C]//Industrial Electronics and Applications. IEEE , 2013:674-679
[12] KAZEMI R , JANBAKHSH A A. Nonlinear adaptive slidingmode control for vehicle handling improvement via steer-by-wire[J].International Journal of Automotive Technology , 2010 , 11(3):345-354
[13] DO M T , MAN Z , ZHANG C , et al. Robustsliding mode-based learning control for steer-by-wire systems in modernvehicles[J]. Vehicular Technology IEEE Transactions on , 2014 , 63(2):580-590
[14] PISU P. Adaptive Threshold based diagnosticsfor steer-by-wire systems[J]. Journal of Dynamic Systems Measurement &Control , 2006 , 128(2): 428-435
[15] WANGXiang , ZONG Changfu , XING Haitao , et al. A real time fault diagnosis schemefor DC motor in an electrically-controlled steering system [J]. Automotive Engineering, 2013 , 35(2):179-183
[16] HE LCHEN G Y ,ZHENG H Y. Fault tolerantcontrol method of dual steering actuator motors for steer-by-wire system[J].International Journal of Automotive Technology , 2015 , 16(6):977-987
[17] KAY H S , KHALIL H K. Universal controllerswith nonlinear integrators[C]// American Control Conference ,2002. Proceedings ofthe. IEEE Xplore ,2002:116-121
编辑整理:厚势分析师拉里佩
转载请注明来自厚势和厚势公号:iHoushi
-END-
文章精选
企业家
智能驾驶
新能源汽车
项目和评论
这些大神从Google出走,创办了五家(命运各异的)无人车公司
厚
势
汽
车
为您对接资本和产业
新能源汽车 自动驾驶 车联网
联系邮箱
bp@ihoushi.com

点击阅读原文,查看文章「厚势汽车行业一周要闻回顾(2.25~3.3)」





