让你的模型acc更上一层楼:优化调参总结

极市导读
本系列主要探究哪些模型trick和数据的方法可以大幅度让你的分类性能更上一层楼,本篇主要结合自身经验讲解一些辅助训练的手段和技术。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
往期:让你的模型acc更上一层楼:模型trick和数据方法总结
二、Tricks
本文主要分一下几个方向来进行讲解
-
权重平均 -
蒸馏 -
分辨率
2.1 权重平均
由于深度学习训练往往不能找到全局最优解,大部分的时间都是在局部最优来回的晃动,我们所取得到的权重很可能是局部最优的最差的那一个,所以一个解决的办法就是把这几个局部最优解拿过来,做一个均值操作,再让网络加载这个权重进行预测,那么有了这个思想,就衍生了如下的权重平均的方法。
1. EMA
指数移动平均(Exponential Moving Average)也叫权重移动平均(Weighted Moving Average),是一种给予近期数据更高权重的平均方法。(PS: EMA是统计学常用的方法,不要以为是DL才有的,DL只是拿来用到了权重上和求bn的mean和std上)。
公式如下:
假设有n个数:
EMA: ,其中, 表示前 条的平均值 ( ), 是加权权重值 (一般设为0.9-0.999)。
这里的 就是表示的是模型权重, 则表示的是影子权重,影子权重不参与训练。
代码如下:
class ModelEma(nn.Module):
def __init__(self, model, decay=0.9999, device=None):
super(ModelEma, self).__init__()
# make a copy of the model for accumulating moving average of weights
self.module = deepcopy(model)
self.module.eval()
self.decay = decay
self.device = device # perform ema on different device from model if set
if self.device is not None:
self.module.to(device=device)
def _update(self, model, update_fn):
with torch.no_grad():
for ema_v, model_v in zip(self.module.state_dict().values(), model.state_dict().values()):
if self.device is not None:
model_v = model_v.to(device=self.device)
ema_v.copy_(update_fn(ema_v, model_v))
def update(self, model):
self._update(model, update_fn=lambda e, m: self.decay * e + (1. - self.decay) * m)
def set(self, model):
self._update(model, update_fn=lambda e, m: m)
EMA的好处是在于不需要增加额外的训练时间,也不需要手动调参,只需要在测试阶段,多进行几组测试挑选最好偶的结果即可。不过是否真的具有提升,还是和具体任务相关,比赛的话可以多加尝试。
2. SWA
随机权重平均(Stochastic Weight Averaging),SWA是一种通过随机梯度下降改善深度学习模型泛化能力的方法,而且这种方法不会为训练增加额外的消耗,这种方法可以嵌入到Pytorch中的任何优化器类中。
具有如下几个特点:
-
SWA可以改进模型训练过程的稳定性; -
SWA的扩展方法可以达到高精度的贝叶斯模型平均的效果,同时对深度学习模型进行校准; -
即便是在低精度(int8)下训练的SWA,即SWALP,也可以达到全精度下SGD训练的效果。
由于pytroch已经实现了SWA,所以可以直接使用,代码如下:
from torchcontrib.optim import SWA
...
...
# training loop
base_opt = torch.optim.SGD(model.parameters(), lr=0.1)
opt = torchcontrib.optim.SWA(base_opt, swa_start=10, swa_freq=5, swa_lr=0.05)
for _ in range(100):
opt.zero_grad()
loss_fn(model(input), target).backward()
opt.step()
opt.swap_swa_sgd()
这里可以使用任何的优化器,不局限于SGD,训练结束后可以使用swap_swa_sgd()来观察模型对应的SWA权重。
SWA能够work的关键有两点:
-
SWA采用改良的学习率策略以便SGD能够继续探索能使模型表现更好的参数空间。比如,我们可以在训练过程的前75%阶段使用标准的学习率下降策略,在剩下的阶段保持学习率不变。 -
将SGD经过的参数进行平均。比如,可以将每个epoch最后25%训练时间的权重进行平均。
可以看一下更新权重的代码细节:
class AveragedModel(Module):
def __init__(self, model, device=None, avg_fn=None):
super(AveragedModel, self).__init__()
self.module = deepcopy(model)
if device is not None:
self.module = self.module.to(device)
self.register_buffer('n_averaged',
torch.tensor(0, dtype=torch.long, device=device))
if avg_fn is None:
def avg_fn(averaged_model_parameter, model_parameter, num_averaged):
return averaged_model_parameter + \
(model_parameter - averaged_model_parameter) / (num_averaged + 1)
self.avg_fn = avg_fn
def forward(self, *args, **kwargs):
return self.module(*args, **kwargs)
def update_parameters(self, model):
# p_model have not been done
for p_swa, p_model in zip(self.parameters(), model.parameters()):
device = p_swa.device
p_model_ = p_model.detach().to(device)
if self.n_averaged == 0:
p_swa.detach().copy_(p_model_)
else:
p_swa.detach().copy_(self.avg_fn(p_swa.detach(), p_model_,
self.n_averaged.to(device)))
self.n_averaged += 1
可以看到,相比于EMA,SWA是可以选择如何更新权重的方法,如果不传入新的方法,则默认使用直接求平均的方法,也可以采用指数平均的方法。
由于SWA平均的权重在训练过程中是不会用来预测的,所以当使用opt.swap_swa_sgd()重置权重之后,BN层相对应的统计信息仍然是之前权重的, 所以需要进行一次更新,代码如下:
opt.bn_update(train_loader, model)
这里可以引出一个关于bn的小trick
3. precise bn
由于BN在训练和测试的时候,mean和std的更新是不一致的,如下图:
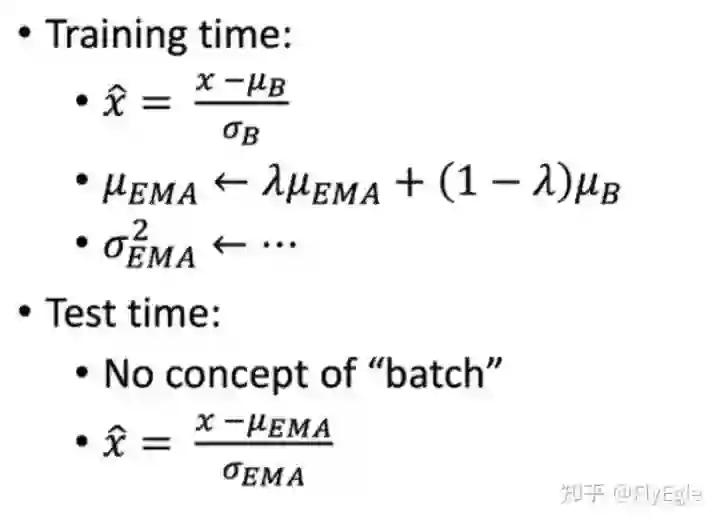
可以认为训练的时候和我们做aug是类似的,增加“噪声”, 使得模型可以学到的分布变的更广。但是EMA并不是真的平均,如果数据的分布差异很大,那么就需要重新计算bn。简单的做法如下:
-
训练一个epoch后,固定参数 -
然后将训练数据输入网络做前向计算,保存每个step的均值和方差。 -
计算所有样本的均值和方差。 -
测试。
代码如下:
def update_bn_stats(args: Any, model: nn.Module, data_loader: Iterable[Any], num_iters: int = 200 # pyre-ignore
) -> None:
bn_layers = get_bn_modules(model)
if len(bn_layers) == 0:
return
momentum_actual = [bn.momentum for bn in bn_layers]
if args.rank == 0:
a = [round(i.running_mean.cpu().numpy().max(), 4) for i in bn_layers]
logger.info('bn mean max, %s', max(a))
logger.info(a)
a = [round(i.running_var.cpu().numpy().max(), 4) for i in bn_layers]
logger.info('bn var max, %s', max(a))
logger.info(a)
for bn in bn_layers:
bn.momentum = 1.0
running_mean = [torch.zeros_like(bn.running_mean) for bn in bn_layers]
running_var = [torch.zeros_like(bn.running_var) for bn in bn_layers]
ind = -1
for ind, inputs in enumerate(itertools.islice(data_loader, num_iters)):
with torch.no_grad():
model(inputs)
for i, bn in enumerate(bn_layers):
# Accumulates the bn stats.
running_mean[i] += (bn.running_mean - running_mean[i]) / (ind + 1)
running_var[i] += (bn.running_var - running_var[i]) / (ind + 1)
if torch.sum(torch.isnan(bn.running_mean)) > 0 or torch.sum(torch.isnan(bn.running_var)) > 0:
raise RuntimeError(
"update_bn_stats ERROR(args.rank {}): Got NaN val".format(args.rank))
if torch.sum(torch.isinf(bn.running_mean)) > 0 or torch.sum(torch.isinf(bn.running_var)) > 0:
raise RuntimeError(
"update_bn_stats ERROR(args.rank {}): Got INf val".format(args.rank))
if torch.sum(~torch.isfinite(bn.running_mean)) > 0 or torch.sum(~torch.isfinite(bn.running_var)) > 0:
raise RuntimeError(
"update_bn_stats ERROR(args.rank {}): Got INf val".format(args.rank))
assert ind == num_iters - 1, (
"update_bn_stats is meant to run for {} iterations, "
"but the dataloader stops at {} iterations.".format(num_iters, ind)
)
for i, bn in enumerate(bn_layers):
if args.distributed:
all_reduce(running_mean[i], op=ReduceOp.SUM)
all_reduce(running_var[i], op=ReduceOp.SUM)
running_mean[i] = running_mean[i] / args.gpu_nums
running_var[i] = running_var[i] / args.gpu_nums
bn.running_mean = running_mean[i]
bn.running_var = running_var[i]
bn.momentum = momentum_actual[i]
if args.rank == 0:
a = [round(i.cpu().numpy().max(), 4) for i in running_mean]
logger.info('bn mean max, %s (%s)', max(a), a)
a = [round(i.cpu().numpy().max(), 4) for i in running_var]
logger.info('bn var max, %s (%s)', max(a), a)
2.2 蒸馏
模型蒸馏是一个老生常谈的话题了,不过经过实验以来,蒸馏的确是一个稳定提升性能的技巧,不过这里的性能一般是指小模型来说。如果你的任务是不考虑开销的,直接怼大模型就好了,蒸馏也不需要。但是反之,如果线上资源吃紧,要求FLOPs或者Params,那么蒸馏就是一个非常好的选择。
举个例子,以前每次学渣考试都是60分,学霸考试都是90分,这一次学渣通过抄袭学霸,考到了75分,学霸依然是90分,至于为什么学渣没有考到90分,可能是因为学霸改了答案也可能是因为学霸的字写的好。那么这个抄袭就是蒸馏,但是学霸的知识更丰富,所以分数依然很高,那这个就是所谓的模型泛华能力也叫做鲁棒性。
简而言之,蒸馏就是使得弱者逼近强者的手段。这里的弱者被叫做Student模型,强者叫做Teacher模型。
使用蒸馏最好是同源数据或者同源模型,同源数据会防止由于数据归纳的问题发生偏置,同源模型抽取信息特征近似,可以更好的用于KL散度的逼近。
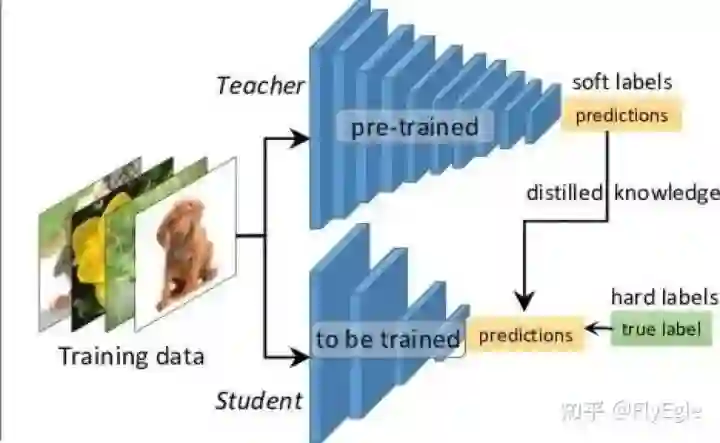
蒸馏过程
-
先训练一个teacher模型,可以是非常非常大的模型,只要显存放的下就行,使用常规CrossEntropy损失进行训练。 -
再训练一个student模型,使用CrossEntropy进行训练,同时,把训练好的teacher模型固定参数后得到logits,用来与student模型的logits进行KL散度学习。
KL散度是一种衡量两个分布之间的匹配程度的方法。定义如下:
其中, 是近似分布, 是我们想要用 匹配的真实分布。如果两个分布是完全相同的,那么KL为0,KL 散度越小,真实分布与近似分布之间的匹配就越好。
KL散度代码如下:
class KLSoftLoss(nn.Module):
r"""Apply softtarget for kl loss
Arguments:
reduction (str): "batchmean" for the mean loss with the p(x)*(log(p(x)) - log(q(x)))
"""
def __init__(self, temperature=1, reduction="batchmean"):
super(KLSoftLoss, self).__init__()
self.reduction = reduction
self.eps = 1e-7
self.temperature = temperature
self.klloss = nn.KLDivLoss(reduction=self.reduction)
def forward(self, s_logits, t_logits):
s_prob = F.log_softmax(s_logits / self.temperature, 1)
t_prob = F.softmax(t_logits / self.temperature, 1)
loss = self.klloss(s_prob, t_prob) * self.temperature * self.temperature
return loss
这里的temperature稍微控制一下分布的平滑,自己的经验参数是设置为5。
2.3 分辨率
对于分类问题,训练和推理的分辨率是有一定程度的关系的,这个跟我们数据增强的时候采用的resize和randomcrop也有关系。一般的时候,训练采用先crop到256然后resize到224,大概是0.875的一个比例的关系,不管最终输入到cnn的尺寸多大,基本上都是保持这样的一个比例关系,resize_size = crop_size * 0.875。
那么推理的时候是否如此呢?
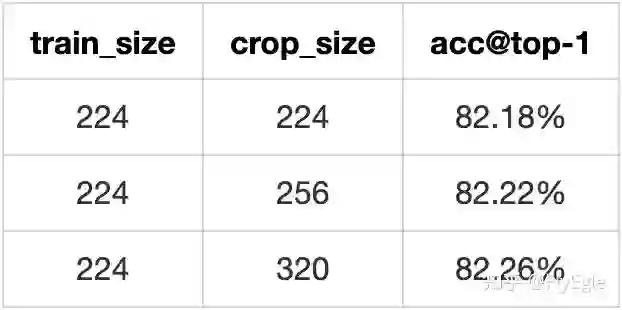
在自己的业务数据集上实测结果如上表,可以发现测试的时候实际有0.7的倍率关系会达到最好的效果,再大精度就会下降。但是如果训练的尺寸越大,实际上测试增加分辨率带来的提升就越小。
那么有没有什么简单的方法可以有效的提升推理尺寸大于训练尺寸所带来的收益增幅呢?
FaceBook提出了一个简单且实用的方法FixRes,仅仅需要在正常训练的基础上,Finetune几个epoch就可以提升精度。
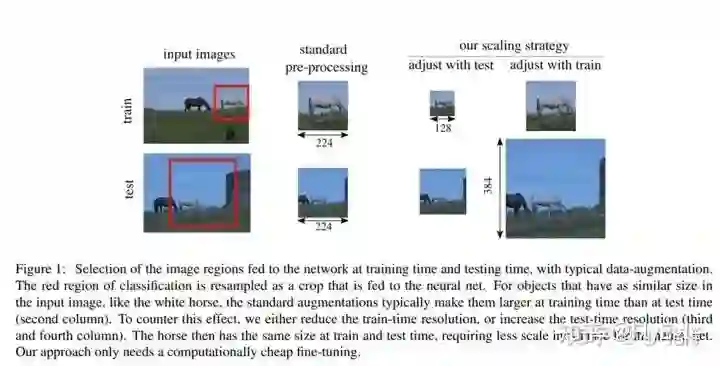
如上图所示,虽然训练和测试时的输入大小相同,但是物体的分辨率明显不同,cnn虽然可以学习到不同尺度大小的物体的特征,但是理论上测试和训练的物体尺寸大小接近,那么效果应该是最好的。
代码如下:
"""
R50 为例子,这里冻结除了最后一个block的bn以及fc以外的所有参数
"""
if args.fixres:
# forzen others layers except the fc
for name, child in model.named_children():
if 'fc' not in name:
for _, params in child.named_parameters():
params.requires_grad = False
if args.fixres:
model.eval()
model.module.layer4[2].bn3.train()
# data aug for fixres train
if self.fix_crop:
self.data_aug = imagenet_transforms.Compose(
[
Resize(int((256 / 224) * self.crop_size)),
imagenet_transforms.CenterCrop(self.crop_size),
imagenet_transforms.ToTensor(),
imagenet_transforms.Normalize(mean=self.mean, std=self.std)
]
)
训练流程如下:
-
先固定除了最后一层的bn以及FC以外的所有参数。 -
训练的数据增强采用推理的增强方法,crop尺寸和推理大小保持一致。 -
用1e-3的学习率开始进行finetune。
当然,如果想要重头使用大尺寸进行训练,也可以达到不错的效果,FixRes本身是为了突破这个限制,从尺寸上面进一步提升性能。
三、总结
-
EMA, SWA基本上都不会影响训练的速度,还可能提点,建议打比赛大家都用起来,毕竟提升0.01都很关键。做业务的话可以不用太care这个东西。 -
precise bn, 如果数据的分布差异很大的话,最好还是使用一下,不过会影响训练速度,可以考虑放到最后几个epoch再使用。 -
蒸馏,小模型都建议使用,注意一下调参即可,也只有一个参数,多试试就行了。 -
FixRes,固定FLOPs的场景或者想突破精度都可以使用,简单有效。
参考
-
https://pytorch.org/blog/stochastic-weight-averaging-in-pytorch/ -
https://zhuanlan.zhihu.com/p/68748778 -
https://arxiv.org/abs/1906.06423
下一篇简单讲讲数据怎么处理可以提升我们的模型的性能~
如果觉得有用,就请分享到朋友圈吧!
公众号后台回复“transformer”获取最新Transformer综述论文下载~

# CV技术社群邀请函 #

备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~