WRC 2017 | 地震带的救星:日本灾后救援机器人研究成果及发展现状

本次会议有来自国内外 300 多位机器人领域知名科学家、企业家、政府工作者和国际科技机构代表出席,雷锋网也来到了现场为大家带来新鲜出炉的报道。
来自日本的IEEE RAS现任主席Satoshi Tadokoro是参加大会的其中一位知名科学家,他在今天的主论坛上发表了关于“日本灾后救援机器人”的演讲。

Satoshi Tadokoro
日本东北大学副院长兼研究教授,Satoshi Tadokoro自2002年以来开始担任国际救援系统研究机构主席。2016年至2017年期间担任IEEE机器人与自动化学会主席。2002年至2007年期间,他作为MEXT DTT救援机器人项目的项目经理。
他亦曾担任NEDO灾害机器人项目的首席研究员,其团队研发出了多个救援机器人,其中名为Quince和Active scope Camera的两个机器人被用于福岛第一核电站事故中的核反应堆建筑灾害事故的救援,故知名度较高。2014年至2018年,他将担任日本内阁政府ImPACT项目的项目经理。他是IEEE、日本机器人学会、日本机械学会及日本仪器与控制工程师学会的会员。
以下为Satoshi Tadokoro的演讲内容,雷锋网做了不改变原意的编辑整理:
今天我想为大家介绍一下日本的救灾机器人。

在灾难发生后需要搜救和应急救援,之后需要重建,所以需要对所造成的问题进行调查,尤其是在灾难发生之前的建筑调查,同时要加强其防震功能。机器人是可以完成某些人类无法完成的事情。比如日本的福岛核电站发生泄漏之后,机器人可以代替人进去调查和救援。

这是一款名为Quince的救援机器人,我参与了它的开发,它最早使用在福岛核电站调查当中。
从操作台对Queens行动的监测,可看到它实时地去检测核电站内部的情况,拍到内部反应堆的照片和关键信息,并对福岛核电站的泄漏事件作出回应和相应的救援措施。当时我们的政府和公司都希望能够把这个冷却系统重新启动,因为里面的温度已经到了98度,所以我们需要让核反应堆冷却。Queens机器人对里面的情况进行调查,然后给我们提供了具体的数据。之后它又进行了多次行动,令温度在一个月后有所下降,因而机器人在这方面发挥了很大的作用。
在这个经验的基础上,日本政府启动了几个项目。救灾机器人项目的目的不仅仅是针对核电站的灾难,还包括自然和人为灾害。机器人主要是用于救援和防灾,目前最大的问题是技术尚未成熟,比较脆弱。比如你可以想像一下,它的摄像系统、成像系统在我们会议厅里可以看见,但是在光线很暗或有雾霾情况下就看不见,如果风速很快或者雨很大的话也难看得见,所以这种脆弱性必须要被解决。
我们试图开发出更强大的视觉系统,尤其是极端情况下的视觉系统。这里所谓的视觉系统并不是机器人本身能不能到那个地方,而是它能不能在现场进一步精密地感知,以便获得更好的信息。这些对情况的估测非常重要,同时在灾难环境当中的自我恢复能力也非常重要。
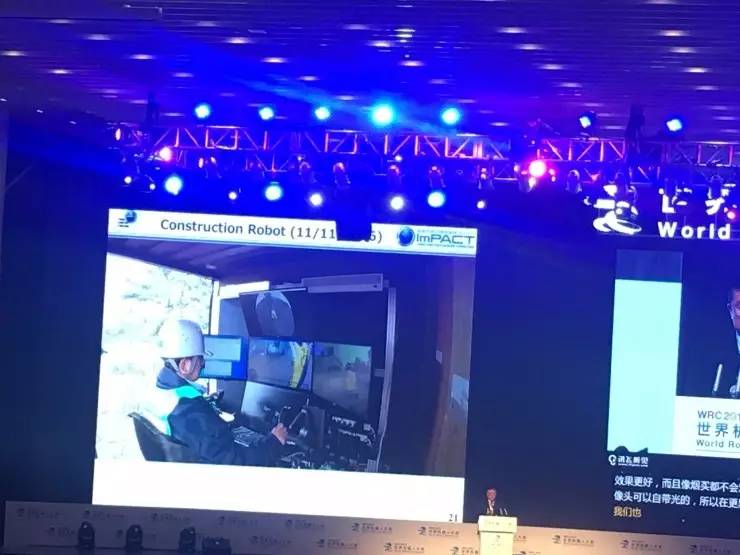
我们要开发下一代能够应对紧急情况的建筑机器人,令他们在灾区重建当中发挥作用,完成更加复杂的任务,也会监测周围的物体。这个机器人可以长期飞行,配合地面的机器给我们提供整个区域的鸟瞰图,另外在强风的状态下也通过这个机器人负载的几个摄像头形成一个立体的照片。机器人获得的信息很快就回馈到了操作员,以便操作员及时调整。它还带有震度感应器,能够感应或者判断触碰物的大小。除此之外,我们提高了建筑机器人的能力,其摄像头是自带光的,所以在黑暗和雾中也可以看得清楚。
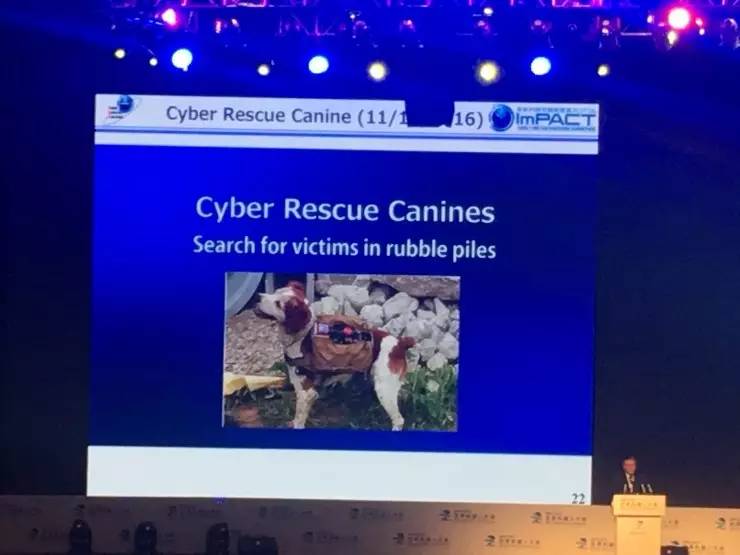
这种救灾机器人主要是用于在石堆当中发现遇难者和幸存者,我们把它和搜救犬进行对比,通过现场的一些摄像头和图像识别的方式,它可以识别人的鞋或者其它的衣物。这只搜救狗找到了要援救人员的位置,受害者就在这个管子里面,由于图像识别的功能,我们就能够自动地识别出这个受害者,令整个搜救能力得以大幅度提升。
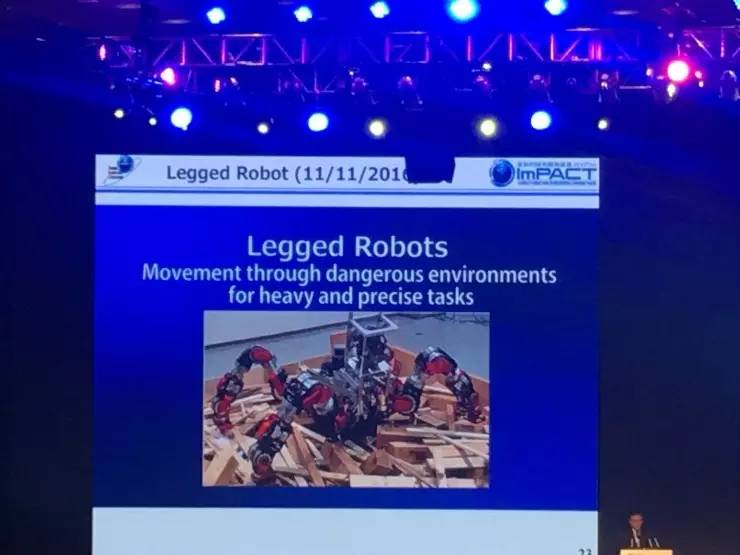
多臂机器人可以帮助人们在很多危险环境中完成工作,这是一个有四条腿的机器人,它里面加装了很多电器和传感器。除了能够行走和提起物品之外,它也能够做一些更复杂的运动。我们可远程控制这个机器人,同时关注这个机器人周边的环境,由于可能无法看到机器人的图像,所以我们也想办法通过计算机图像技术解决图像的盲点。这种多臂机器人的作用是它能够代替我们进入到坍塌、爆炸等危险环境中。

这种装有RM传感器的轻型蜿蜒机器人可以调整爆炸时的压力,它可爬行在水平和竖直方向的管子里。我们可以通过声音的传输计算距离,这种蜿蜒的机器人能够在一些人类难以接触的工厂或者地理位置进行探索。比如60度、70度陡峭的坡。另外,它可以在坍塌的房屋下面找到受害者,并且很好地勘探出周围的环境。这种非常灵活的蜿蜒机器人加上线缆能够进入到一些非常狭窄的空间中,我们通过远程遥控能够远程看到触摸里面的环境,搜救的过程当中可以很好地了解周边的环境。蜿蜒机器人配置10米长的电缆再加上一些振动器,能够用分散型的驱动进入到不同的地方,通过远程控制能够触摸、看见并且听见这种环境的情况,搜救的过程当中能够有更清晰的认识。
通过多振动传感器,这个机器人能够预估前面与接触物体的距离,实时回传数据。机器人能够通过视觉识别技术发现里面的东西,也可以用麦克风的声音传输来探索周边的环境。我们可以通过多麦克风的配置和声音的传输判断它的位置,从而找到受害者,对周边环境进行深入研究。
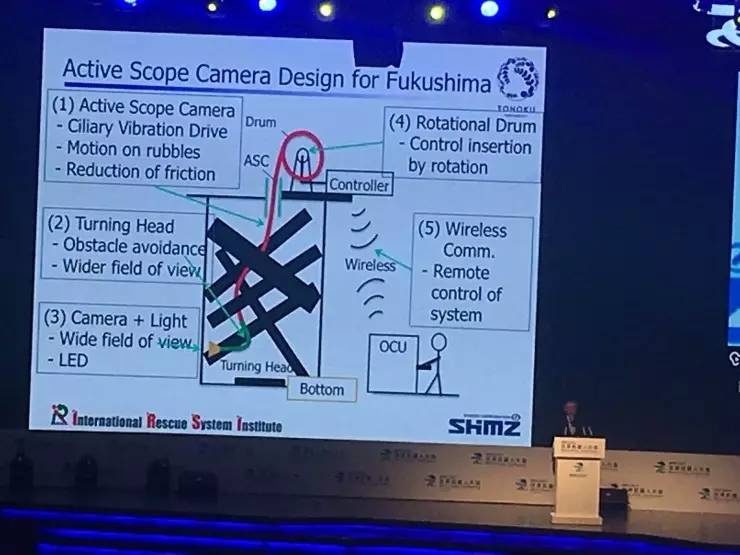
这是传统的摄像头和新的技术摄像头的对比,它能够在非常狭窄的空间里非常灵活地移动。实际上之前在美国已经使用过了,这是一个发生严重事故的建筑现场,这种机器人爬入了8米深的地方之后拍了一些照片,也给我们的研究提供了非常好的信息。
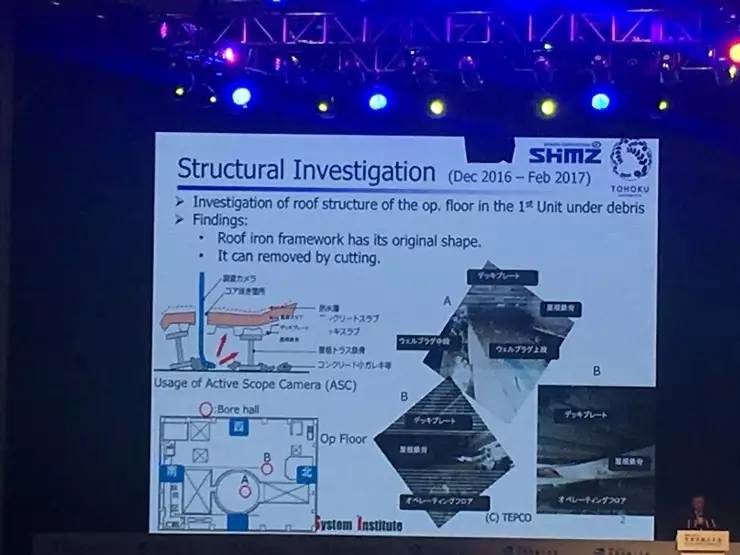
去年4月份我们进行了实地的使用,他们测试了这个机器人的具体能力。去年12月份到今年2月份,他们(美国研究机构)也用这个机器人做了结构性的调研,将这个机器人的摄像头放入到了很多残骸中,然后通过拍照了解内部的结构。这些数据可以帮助我们做出内部的3D模型,从而了解它在坍塌之前屋顶和房屋的结构是什么样子。
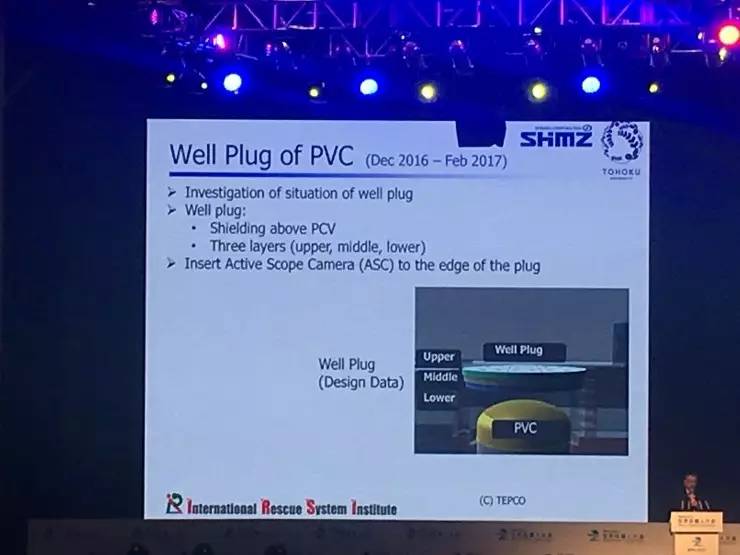
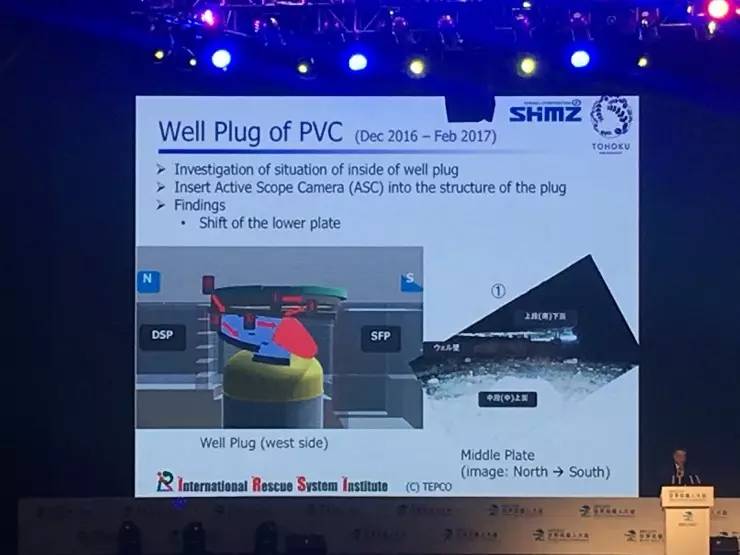
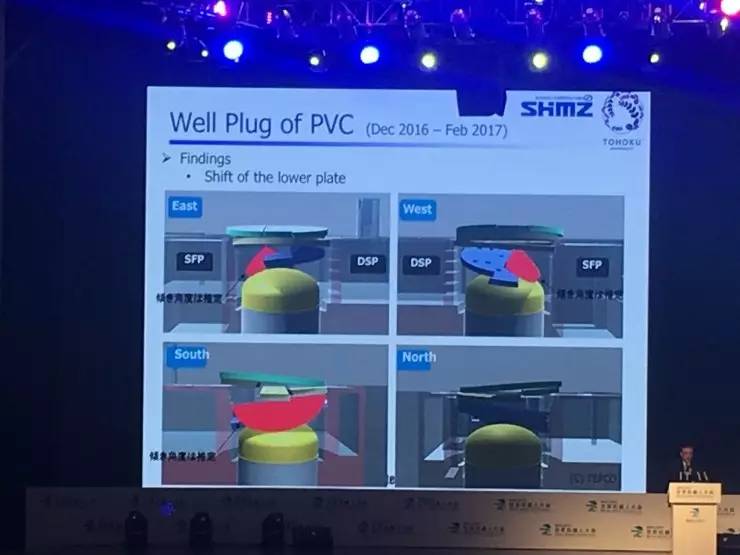
接下来是检查PVC,这些东西要想去除掉的话并不是那么容易,所以必须建立一个3D的模型,然后把摄像头从边上放进去,然后拍出这些照片,通过这些照片可以做出3D的模型,但是这还不够,所以除了把这个摄像头放入到井内之外,我们还进一步地走得更深,拍了更多的照片。基于这些照片和视频,我们很好地做出了3D的模型,甚至了解到了井内更深处的结构。
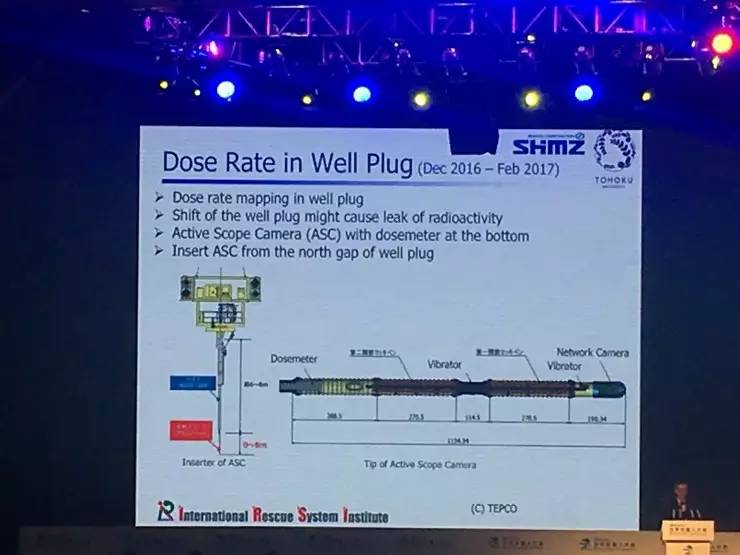
这里辐射也是一个很大的问题,所以我们也想通过摄像头的拍摄,研究了解到它在不同深度的辐射强度到底有多少。这张图显示了不同深度的辐射强度有多少,辐射水平是一个非常危险的水平,这对我们下一阶段的研究是非常重要的。
自然灾害在全世界是很常见的,灾后机器人能够在灾后的响应、复苏和预防发挥非常重要的作用,所以我们需要与中国等国家在技术领域进行合作,“一带一路”是一个非常重要的概念,它可以推进我们的合作。日后我们需要共同面对这些挑战更好地合作与研究。
|
读者福利 IBM 日前内部分享了AI /认知计算、云计算、区块链、物联网以及对话机器人领域的趋势报告,从这些报告或许能给在在这些领域苦苦探索的你一些灵感。关注雷锋网微信(leiphone-sz),输入 “0629” 获得报告原文。 ● ● ● 科技圈自媒体达人吴恩达又双叒叕刷屏了,这次是因为Deeplearning.ai |






