
关于「AI投研邦」
雷锋网旗下会员组织,聚焦AI+10大领域 :AI+汽车(智能驾驶)、AI+教育、AI+金融、AI+智慧城市、AI+安防、AI+医疗等。仅剩199个早鸟席位,欢迎加入。
▲点击上方 雷锋网 关注
文 | 大壮旅
来自雷锋网(leiphone-sz)的报道
雷锋网新智驾按:虽然自动驾驶进展迅速,但其在商业路线图和技术方面却从来不缺问题。其中,有三个未解问题是让公司高管和工程师们最为头疼。
市场研究公司 IHS Markit 中控娱乐与 ADAS 系统研究主管 Egil Juliussen 将这三个问题总结为:
1、我们真的需要激光雷达吗?
2、为了追求所谓的‘网络效应’,科技和汽车公司真的能消除芥蒂,在自动驾驶软件上通力合作吗?
3、行业能顺利解决 L2 到 L3 的转换问题吗?
在Juliussen 看来,这三大问题将成为 2019 年汽车行业最难啃的骨头。
事实上,行业观察者已经察觉到了自动驾驶市场新一轮的合纵连横,科技巨头、一级供应商、新创公司和传统汽车厂商正试图用新技术撬动市场,完成 L2 到 L3 的平稳过渡。
说道 L2 到 L3 的过渡,Semicast Research 首席分析师 Colin Barnden 认为,2019 年年初的 CES 上,一级供应商和汽车厂商会大展身手,推动驾驶员监督系统重新回到台前。
解决了后两个问题,我们还是绕不过最为关键的,那就是搭载了 ADAS 和自动驾驶系统的车辆真的需要激光雷达吗?Juliussen 表示:“最近,业界关于该问题的反思越来越多。”毕竟数字图像雷达崛起后,能实现的功能比从前更多了。
在吵杂的干扰声中,加州新创公司 AEye 前不久对外宣布自家首款商用产品“iDAR”,这是一款与高清摄像头深度融合的固态激光雷达,可以说是为 ADAS 和自动驾驶市场而生的。
自动驾驶汽车不需要激光雷达也能成功的想法其实诞生已经有一年了。大家如此着急的探讨这一问题还是因为激光雷达售价太过昂贵,而且该技术的未来走向现在还不清晰。简单来说,大家等不及了。
虽然除了特斯拉 CEO Elon Musk 这样的狂人,没人敢直截了当地高喊“激光雷达无用论”,但许多图像雷达开发者已经开始将埋葬激光雷达当做自己的潜在目标了。11 月时,恩智浦 CTO Lars Reger 曾表示,恩智浦就准备把这个设想变成现实。
在考虑激光雷达到底有没有意义的问题时,AEye 倒是换了一个角度。这家新创公司相信,汽车厂商对当下的激光雷达产品是拒绝的,因为现有解决方案依靠的是独立传感器组成的阵列,它们“各自为战”会生成天量的数据。
“这就需要更长的处理时间和庞大的算力,因为系统需要通过配置、分析、矫正、降采样和转换才能将这些数据集变成车辆可用的信息。”AEye 解释。
看到这里你也许会想,难道不能引入人工智能,让它帮忙区分出哪些是对路径规划有用的数据吗?毕竟对每个像素采用相同的优先级也太浪费资源了。AEye 也想到了这一点,AEye 副总裁 Stephen Lambright 就指出,iDAR 的研发中借用了该灵感。
Lambright 表示,AEye 的 iDAR“其实深深根植于源自军事防务产业的技术”。AEye CEO Luis Dussan 创业之前就一直在为战斗机设计监视、侦查和防御系统。他创立 AEye 就是为了将“军用级别的性能”赋予自动驾驶汽车。
Lambright 透露称,AEye 在 iDAR 的开发过程中遵循了三大原则,即:
1、不要错过任何细节;
2、不同的事务需要不同的注意力;
3、实时做好每件事。
“简而言之,AEye 的目标是将 iDAR 打造成一套强大的传感器融合系统,不再浪费计算周期。”AEye 产品副总裁 Aravind Ratnam 解释道。
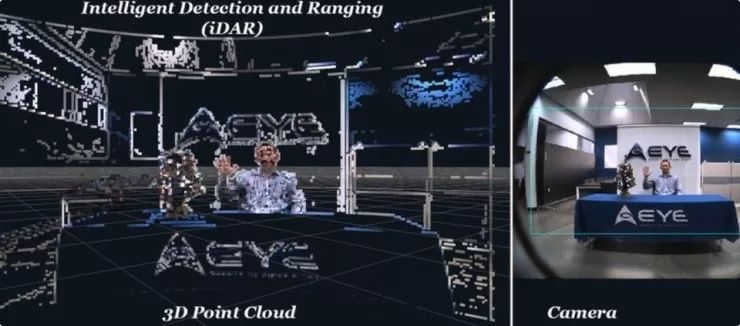
iDAR 的构建包括 1550nm 的固态 MEMS 激光雷达,一颗暗光高清摄像头和嵌入式 AI。这套系统能将 2D 摄像头采集到的 RGB 像素与 3D 激光雷达生成的三维像素(XYZ)进行整合,以创造“全新的实时传感器数据类型”,为自动驾驶汽车的路径规划系统注入更为精确、智能的信息。
值得注意的是,iDAR 提供的并非扫描后对摄像头/激光雷达进行数据融合,它的智能感知系统能将固态激光雷达与高清摄像头进行物理融合。
在 AEye 的定义中,iDAR 创造的全新数据类型被称为“动态三维像素(vixels)”。AEye 表示,动态三维像素能对人类视觉皮层的数据架构进行仿生学习。
据雷锋网新智驾了解,AEye 发布的新 iDAR 系统名为 AE110,它已经是 AEye 公司的第四代原型产品了。
Ratnam 指出,系统内搭载的是一款组合型 SoC,其基础是赛灵思的 Zynq SoC,而 Zyng 则整合了一块基于 ARM 架构的处理器,同时它还融合了一块 FPGA。
在设计之初,不但考虑到了硬件加速和关键分析能力的发挥,还一并将 CPU、DSP、ASSP 和混合信号的功能整合在了设备上。2019 年,AEye 还计划自行为这块组合型 SoC 设计 ASIC(专用集成电路)。
AEye 一直在推销自家的视觉/激光雷达 传感器系统,不过市场上却有不少开发者是高精毫米波雷达芯片的拥趸,他们更偏爱视觉/雷达解决方案。
林利集团资深分析师 Mike Demler 认为 AEye 的解决方案非常有趣,会带来不少特殊功能。不过,他也指出,搞视觉/激光雷达 技术的市场上可不止 AEye 一家,大陆集团也在售卖这种组合单元。不过,大陆集团的方案与 AEye 还是有所不同,它们整合的数据来自两套不同传感器预加工的结果。
在 Demler 看来,AEye 方案的优势在于其传感器融合软件。从本质上来说,“将视觉/激光雷达图像传感器视作一个集成组件能加速感兴趣区域的识别。不过除了这些,摄像头和激光雷达的所有优势和劣势 AEye 一个也逃不掉。”
Demler 认为,虽然 AEye 用的是 MEMS 激光雷达,但却从未公布自家产品的空间分辨率。他猜测,与 Velodyne 的扫描激光雷达相比,这可能是 AEye 的最大弱点。
“摄像头拥有最高分辨率,但在强光和暗光环境下它都会性能缩水。同时,一旦摄像头被尘土或雨雪糊住,也会武功全废。所以,光靠它可保证不了空间分辨率。与摄像头一样,激光雷达在雨雪天性能会明显弱于雷达,因此靠它执行目标检测任务也不是万全之策,而且大多数激光雷达无法测定目标的速度。”
VSI Labs 创始人 Phil Magney 对 AEye 也有自己的看法,因为其就被请去验证 AEye 激光雷达的远距离探测和刷新率问题了。
Magney 强调称,“iDAR 传感器确实挺特殊,因为它对摄像头和激光雷达进行了整合,并在中央计算机消化掉海量数据前对其进行融合。”在 Magney 看来,“这就是边缘融合,因为在分类开始前设备已经开始进行数据融合了。同时,该设备还有向下挖潜,寻找关键主题的能力,这就意味着你无需再处理整个点云场景了。”
“AEye 其实正在开发分类算法,到时会用在融合了的数据集上。”Magney 解释道。
Magney 认为,从理论上来讲,AEye 的所谓动态三位像素创造内容的能力比单个摄像头或激光雷达阵列都要强上不少。不过,需要注意的是,摄像头分辨率比激光雷达要高得多,因此像素与点云的比值可不是一比一。
“如果拿 iDAR 和雷达相比,雷达就显得多余了,因为激光雷达和雷达都是测距仪器。”Magney 解释。
他还强调称,“如果你对激光雷达的深度感知有足够信心且认为它能追踪目标的速度,那么一切皆有可能。值得一提的是,iDAR 的刷新率(100 Hz)是大多数商用激光雷达产品的两倍,这也是 AEye 设备的一个优势。”
不过换句话来说,由于 ADAS 车型肯定比全自动驾驶汽车先上路,因此在 ADAS 市场上,雷达的优势可比激光雷达或 iDAR 要大不少。
“在恶劣天气下雷达明显更占优势,因此它更适合 ADAS 系统。”Magney 强调。“不过,雷达本身的分类能力还是有一定的局限性,这是由雷达设备的固件决定的。好在,有一大波研究人员正努力提升雷达的分类能力,这种设备的功能也在不断丰富,许多新创公司的产品已经能让人自觉点赞了。”
最近 VSI Labs 就参与了 iDAR 传感器的测试,结果显示 AEye 的产品能在 1 公里的距离上发现一辆卡车。同时,VSI Labs 还确认了 iDAR 的刷新率达到了 100 Hz。
“我们参与验证的项目无法直接得出这款传感器的表现及其安全性,不过它能在 1 公里的距离下识别物体,确实够惊人的。”Magney 表示。
那么,到底是雷达还是激光雷达 好呢?Demler 总结称:对于高级别的自动驾驶汽车,现在没有哪家公司敢说激光雷达可有可无。“当然,你也能不用激光雷达就打造出一辆自动驾驶汽车,但这并不意味着它能胜任一切环境,或者说它像摄像头/雷达/激光雷达系统那么安全。”
在 Demler 看来,AEye 的 iDAR 无法完全替代雷达,而德仪的毫米波图像雷达也无法替代激光雷达。“大多数自动驾驶开发者都坚持三大天王战略,而且他们还用了其他传感器做补充。”Demler 解释道。
“安全和冗余都得有备份支撑,没有哪个传感器能通吃一切情况,因此最后还是得准备多种类型的传感器。”Demler 说。
随着产品的发布,AEye 还公布了 B 轮融资的新情况,其拿到的资金已经超过 6000 万美元。B 轮融资中就有汽车厂商、一级和二级供应商参与,此外还有 Hella、LG 和 SK 海力士等战略投资者。
Lambright 指出,Hella 和 LG 的参与对他们来说意义重大,因为 AEye 需要这样的一级供应商伙伴提升 iDAR 的产能并降低其成本。Lambright 预计,2021 年 iDAR 上市后其成本会低于 1000 美元。
- END -
◆ ◆ ◆
推荐阅读
关于「AI投研邦」
雷锋网旗下会员组织,聚焦AI+10大领域 :AI+汽车(智能驾驶)、AI+教育、AI+金融、AI+智慧城市、AI+安防、AI+医疗等。仅剩199个早鸟席位,欢迎加入。


