厉害了!腾讯公布首个机器狗,梅花桩上大秀功夫
作者 | 付静
编辑 | 陈彩娴
少林从师数十冬,梅花桩上练真功。持之以恒锐意修,定可成名盖群雄。
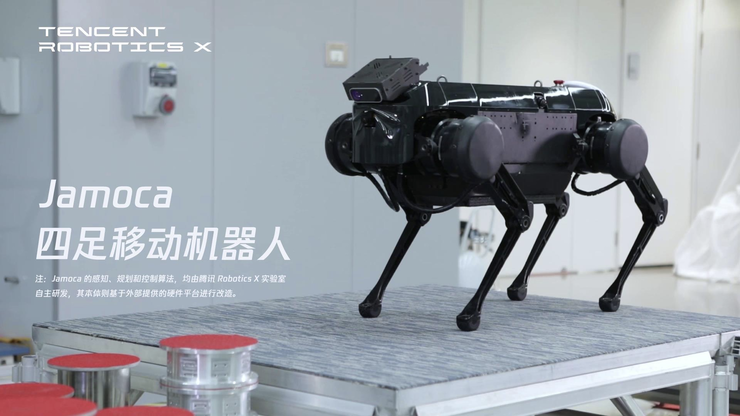
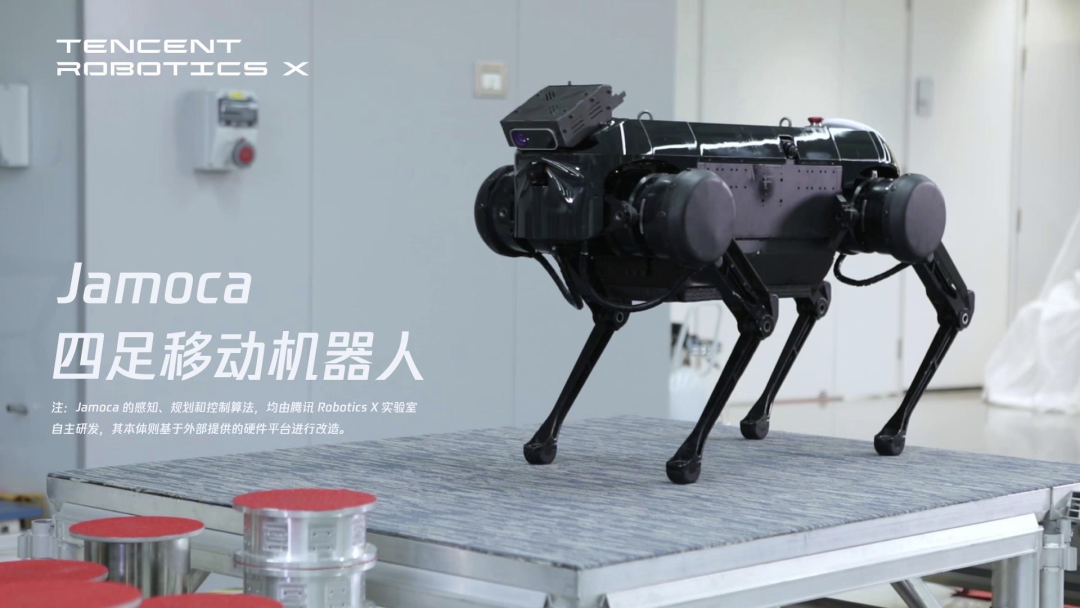
Jamoca 能跑能跳,还能挑战梅花桩

-
理解梅花桩的排布(包括位置和高度); -
选择最佳落脚点及路线并稳定精准地行走(落脚到梅花桩中心点)。
和国际上其他四足机器人走木块的场景比较,此次 Jamoca 所挑战的梅花桩落脚面积更小、高度更高,并有台阶的组合,实现的难度要更大。
-
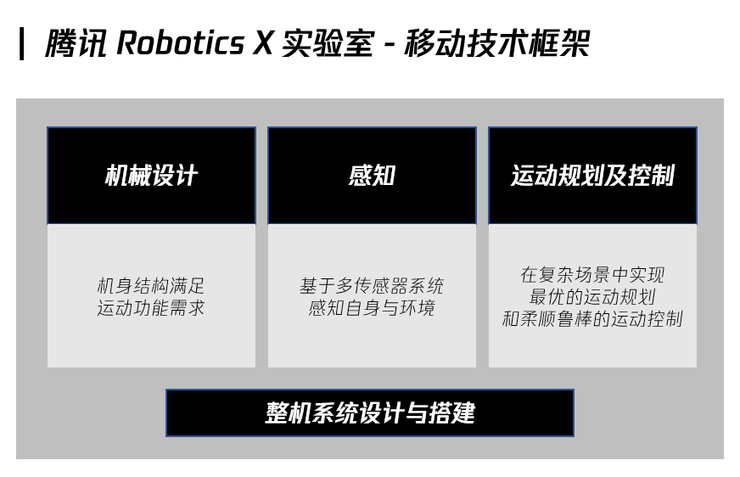
精准环境感知方面,Jamoca 创新性地实现了鲁棒的眼脚标定,并利用 RGB-D 相机对周围环境实时感知;通过特征点匹配的方式,对 Jamoca 自身的运动轨迹在线跟踪;将基于视觉的定位信息与基于运动学的里程计信息和 IMU(惯性测量单元) 数据进行融合,提高了定位追踪的精度和频率;利用算法识别和提取出台阶和梅花桩的表面区域范围和中心点位置,将数据进行融合,重建出整个三维运动场景。 -
最优运动线路规划和实时运动控制方面,Jamoca 基于实时感知到的本体及梅花桩位置信息,基于质心动力学,实现在线质心轨迹生成和落脚点规划。在保证机器人的四条腿可以安全地踏到下一步的梅花桩的同时,优化出一条本体移动长度最短、综合耗力最小的运动轨迹,并且可以在线持续地进行上述运动规划。 -
基于实时本体状态估计,Jamoca 能结合质心动力学模型来构建优化问题,实时求解机器人足端所需的地面反作用力,并结合反馈控制实现精准鲁棒的实时力控,可完成行走、对角小跑以及跳跃等的运动控制。
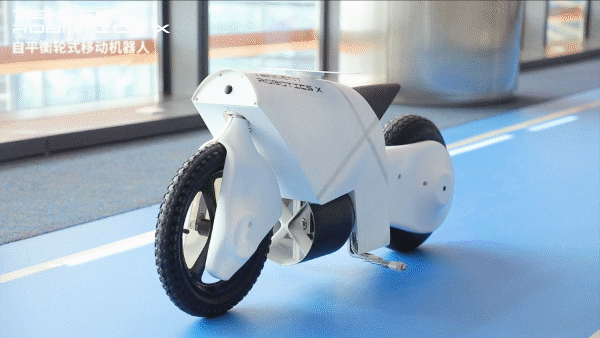
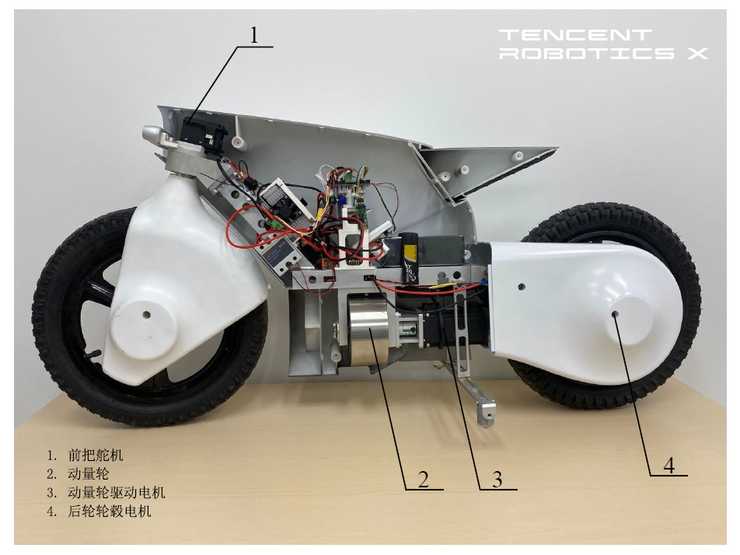
小摩托静止、行进自主保持平衡




移动或运动能力,是机器人最核心、也是最基本的能力之一,决定了它能去到什么场景,做什么事情,未来有什么样的想象力。我们很高兴能看到这两项进展,并将继续深入探索机器人的通用能力,为虚拟到真实世界搭建一个有力的桥梁。


点击阅读原文,直达AAAI小组!
登录查看更多
相关内容

专知会员服务
32+阅读 · 2019年11月28日
Arxiv
0+阅读 · 2021年1月21日
Arxiv
6+阅读 · 2019年2月27日



相关VIP内容
专知会员服务
32+阅读 · 2019年11月28日
相关资讯
相关论文
Arxiv
0+阅读 · 2021年1月21日
Arxiv
6+阅读 · 2019年2月27日