CVPR 2022 | 惊呆了!只用一张图+相机走位,AI就能脑补周围环境!
点击下方卡片,关注“CVer”公众号
AI/CV重磅干货,第一时间送达
明敏 发自 凹非寺
转载自:量子位(QbitAI)
站在门口看一眼,AI就能脑补出房间里面长什么样:
是不是有线上VR看房那味儿了?
不只是室内效果,来个远景长镜头航拍也是so easy:
而且渲染出的图像通通都是高保真效果,仿佛是用真相机拍出来的一样。
最近一段时间,用2D图片合成3D场景的研究火了一波又一波。
但是过去的许多研究,合成场景往往都局限在一个范围比较小的空间里。
比如此前大火的NeRF,效果就是围绕画面主体展开。

这一次的新进展,则是将视角进一步延伸,更侧重让AI预测出远距离的画面。
比如给出一个房间门口,它就能合成穿过门、走过走廊后的场景了。

目前,该研究的相关论文已被CVPR2022接收。

Look Outside the Room: Synthesizing A Consistent Long-Term 3D Scene Video from A Single Image
主页:
https://xrenaa.github.io/look-outside-room/
论文:https://arxiv.org/abs/2203.09457
输入单张画面和相机轨迹
让AI根据一个画面,就推测出后面的内容,这个感觉是不是和让AI写文章有点类似?
实际上,研究人员这次用到的正是NLP领域常用的Transformer。
他们利用自回归Transformer的方法,通过输入单个场景图像和摄像机运动轨迹,让生成的每帧画面与运动轨迹位置一一对应,从而合成出一个远距离的长镜头效果。
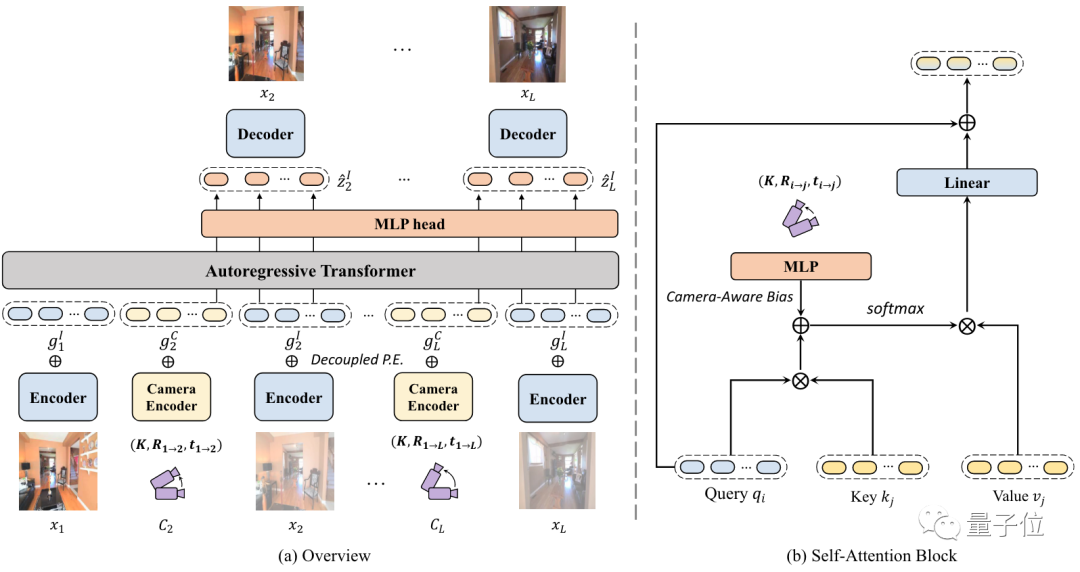
整个过程可以分为两个阶段。
第一阶段先预训练了一个VQ-GAN,可以把输入图像映射到token上。
VQ-GAN是一个基于Transformer的图像生成模型,其最大特点就是生成的图像非常高清。
在这部分,编码器会将图像编码为离散表示,解码器将表示映射为高保真输出。
第二阶段,在将图像处理成token后,研究人员用了类似GPT的架构来做自回归。
具体训练过程中,要将输入图像和起始相机轨迹位置编码为特定模态的token,同时添加一个解耦的位置输入P.E.。
然后,token被喂给自回归Transformer来预测图像。
模型从输入的单个图像开始推理,并通过预测前后帧来不断增加输入。
研究人员发现,并非每个轨迹时刻生成的帧都同样重要。因此,他们还利用了一个局部性约束来引导模型更专注于关键帧的输出。
这个局部性约束是通过摄像机轨迹来引入的。
基于两帧画面所对应的摄像机轨迹位置,研究人员可以定位重叠帧,并能确定下一帧在哪。
为了结合以上内容,他们利用MLP计算了一个“相机感知偏差”。
这种方法会使得在优化时更加容易,而且对保证生成画面的一致性上,起到了至关重要的作用。
实验结果
本项研究在RealEstate10K、Matterport3D数据集上进行实验。
结果显示,相较于不规定相机轨迹的模型,该方法生成图像的质量更好。
与离散相机轨迹的方法相比,该方法的效果也明显更好。
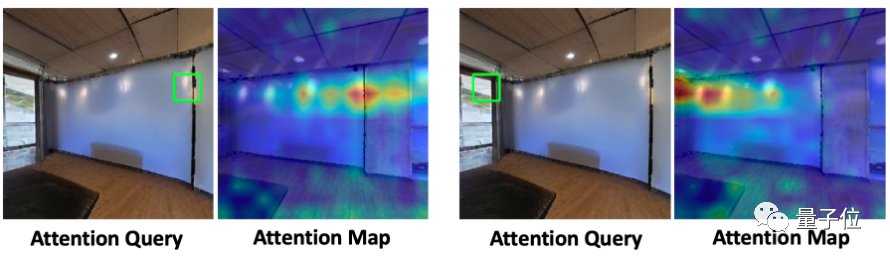
作者还对模型的注意力情况进行了可视化分析。
结果显示,运动轨迹位置附近贡献的注意力更多。
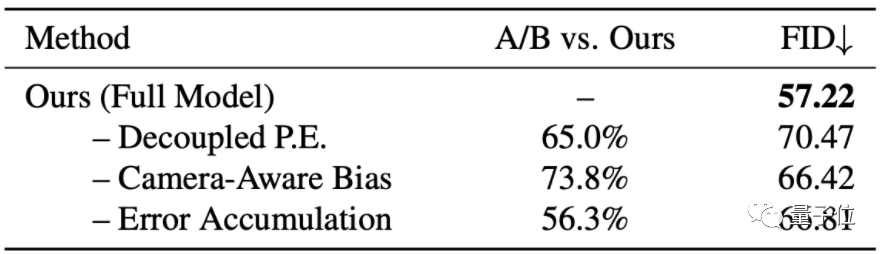
在消融实验上,结果显示该方法在Matterport3D数据集上,相机感知偏差和解耦位置的嵌入,都对提高图像质量和帧与帧之间的一致性有所帮助。
两位作者均是华人
Xuanchi Ren为香港科技大学本科生。

他曾在微软亚研院实习过,2021年暑期与Xiaolong Wang教授有过合作。
Xiaolong Wang是加州大学圣地亚哥分校助理教授。

他博士毕业于卡内基梅隆大学机器人专业。
研究兴趣有计算机视觉、机器学习和机器人等。特别自我监督学习、视频理解、常识推理、强化学习和机器人技术等领域。
ICCV和CVPR 2021论文和代码下载
后台回复:CVPR2021,即可下载CVPR 2021论文和代码开源的论文合集
后台回复:ICCV2021,即可下载ICCV 2021论文和代码开源的论文合集
后台回复:Transformer综述,即可下载最新的3篇Transformer综述PDF
CVer-Transformer交流群成立
扫描下方二维码,或者添加微信:CVer6666,即可添加CVer小助手微信,便可申请加入CVer-Transformer 微信交流群。另外其他垂直方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch、TensorFlow和Transformer等。
一定要备注:研究方向+地点+学校/公司+昵称(如Transformer+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群
![]()
▲扫码或加微信: CVer6666,进交流群
CVer学术交流群(知识星球)来了!想要了解最新最快最好的CV/DL/ML论文速递、优质开源项目、学习教程和实战训练等资料,欢迎扫描下方二维码,加入CVer学术交流群,已汇集数千人!
![]()
▲扫码进群
▲点击上方卡片,关注CVer公众号
整理不易,请点赞和在看![]()






