最近,特斯拉 AI 高级总监 Andrej Karpathy 做了一件很有趣的事情,他把 Yann LeCun 等人 1989 年的一篇论文复现了一遍。一是为了好玩,二是为了看看这 33 年间,深度学习领域到底发生了哪些有趣的变化,当年的 LeCun 到底被什么卡了脖子。此外,他还展望了一下 2055 年的人将如何看待今天的深度学习研究。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
1989 年,Yann Lecun 等人发表了一篇名为「Backpropagation Applied to Handwritten Zip Code Recognition」的论文。在我看来,这篇论文有一定的历史意义,因为据我所知,它是使用反向传播训练的端到端神经网络在现实世界中最早的应用。
论文链接:http://yann.lecun.com/exdb/publis/pdf/lecun-89e.pdf
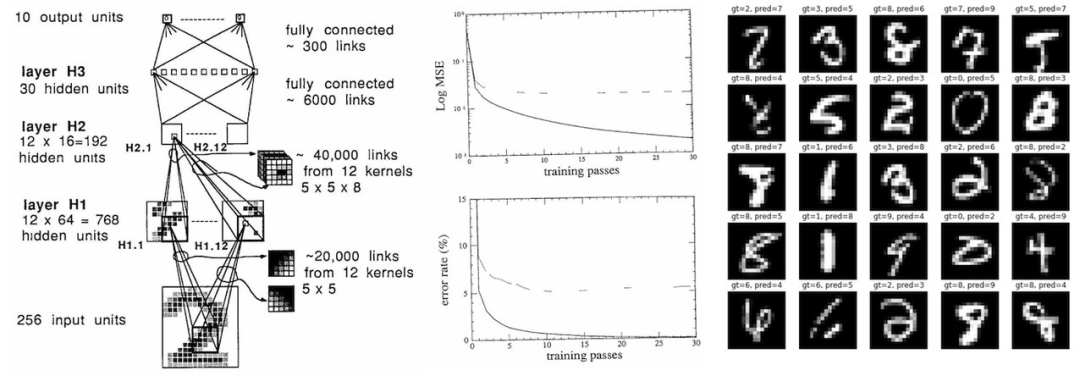
尽管数据集和神经网络都比较小(7291 张 16x16 灰度数字图像,1000 个神经元),但这篇论文在 33 年后的今天读起来依然没感觉过时:它展示了一个数据集,描述了神经网络的架构、损失函数、优化,还给出了训练集和测试集的实验分类错误率。它是那么得有辨识度,完全可以被归类为现代深度学习论文,但它却来自 33 年前。所以我开始复现这篇论文,一是为了好玩,二是为了将此练习作为一个案例研究,探讨深度学习进步的本质。
我试着尽可能地接近论文,并在 PyTorch 中复现了每个细节,参见以下 GitHub 库:
复现链接:https://github.com/karpathy/lecun1989-repro
最初的网络是用 Lisp 实现的,使用了 Bottou 和 LeCun 1988 年提出的反向传播模拟器 SN(后来被命名为 Lush)。这篇论文是法语的,所以我读不懂。但从句法来看,你可以使用高级 API 指定神经网络,类似于今天在 PyTorch 中做的事情。
1)一个快速 (C/CUDA) 通用 Tensor 库,用来实现多维张量的基本数学运算;
2)一个 autograd 引擎,用来跟踪前向计算图并为 backward pass 生成运算;
3)一个可脚本化的(Python)深度学习、高级 API,包含常见的深度学习运算、层、架构、优化器、损失函数等。
在训练过程中,我们要对 7291 个样本组成的训练集进行 23 次 pass,总共有 167693 个样本 / 标签展示给神经网络。最初的网络在一个 SUN-4/260 工作站(发布于 1987 年)上训练了 3 天。现如今,我用我的 MacBook Air (M1) CPU 就能运行这个实现,而且只用了 90 秒(实现了大约 3000 倍的加速)。我的 conda 被设置为使用本机 amd64 构建,而不是 Rosetta 模拟。如果 PyTorch 能够支持 M1 的所有功能(包括 GPU 和 NPU),那么加速效果可能会更加明显。
我还尝试单纯地在一个 A100 GPU 上运行代码,但训练却更慢,原因很可能是网络太小(4 层 convnet,最多 12 个通道,总共 9760 个参数,64K MACs,1K 激活),并且 SGD 一次只使用一个示例。也就是说,如果一个人真的想用现代硬件(A100)和软件基础设施(CUDA,PyTorch)来解决这个问题,我们需要把 per-example SGD 换成 full-batch 训练,以最大限度地提高 GPU 利用率。这样一来,我们很有可能额外实现约 100 倍的训练加速。
eval: split train. loss 2.5e-3. error 0.14%. misses: 10eval: split test . loss 1.8e-2. error 5.00%. misses: 102
但在第 23 轮 pass 之后,我的训练脚本 repro.py 打印出的结果却是:
eval: split train. loss 4.073383e-03. error 0.62%. misses: 45eval: split test . loss 2.838382e-02. error 4.09%. misses: 82
所以,我只是粗略复现了论文的结果,数字并不精确。想要得到和原论文一模一样的结果似乎是不可能的,因为原始数据集已经随着时间的流逝而丢失了。所以,我必须使用更大的 MNIST 数据集来模拟它,取它的 28x28 digits,用双线性插值将它们缩小到 16x16 像素,并随机而不替换地从中抽取正确数量的训练和测试集示例。
但我确信还有其他影响精确复现的原因,如这篇论文对权重初始化方案的描述有点过于抽象;PDF 文件中可能存在一些格式错误(小数点、平方根符号被抹掉等等)。例如,论文告诉我们,权重初始化是从统一「2 4 / F」中提取的,其中 F 是 fan-in,但我猜这里实际是「2.4 / sqrt(F)」,其中的 sqrt 有助于保持输出的标准差。H1 和 H2 层之间特定的稀疏连接结构也有问题,论文只说它是「根据一个方案选择的,这个方案先按下不表」,所以我不得不用重叠的块稀疏结构做一些合理的猜测。
该论文还声称使用了 tanh non-linearity,但是我担心这可能实际上是映射 ntanh(1) = 1 的「normalized tanh」,并有可能添加了一个缩小的残差连接,这在当时非常流行,以确保 tanh 的平尾至少有一点梯度。最后,该论文使用了「牛顿法的特殊版本,该版本使用了 Hessian 的正对角近似」。但我只用了 SGD,因为它明显更简单。而且,论文作者表示,「这种算法被认为不会带来学习速度的巨大提升」。
这是我最喜欢的部分。我们生活在 33 年后的今天,深度学习已经是一个非常活跃的研究领域。利用我们现在对深度学习的理解以及这 33 年积累的研发经验,我们能在原结果的基础上做出多少改进呢?
eval: split train. loss 4.073383e-03. error 0.62%. misses: 45eval: split test . loss 2.838382e-02. error 4.09%. misses: 82
首先需要明确,我们正在进行 10 个类别的简单分类。但当时,这被建模为 targets -1(针对负类)或 + 1(针对正类)的均方误差(MSE)回归,输出神经元也具有 tanh non-linearity。因此,我删除了输出层上的 tanh 以获得 class logits,并在标准(多类)交叉熵损失函数中进行交换。这一变化极大地提高了训练错误,使训练集完全过拟合:
eval: split train. loss 9.536698e-06. error 0.00%. misses: 0eval: split test . loss 9.536698e-06. error 4.38%. misses: 87
我怀疑,如果你的输出层有(饱和的)tanh non-linearity 和 MSE 误差,你必须更加小心权重初始化的细节。其次,根据我的经验,一个微调过的 SGD 可以运行得很好,但是当前 Adam 优化器(3e-4 的学习率)几乎总是一个很好的基线,几乎不需要调整。
因此,为了让我更加确信优化不会影响性能,我切换到了 AdamW with,同时将学习率设置为 3e-4,并在训练过程中将学习率降至 1e-4。结果如下:
eval: split train. loss 0.000000e+00. error 0.00%. misses: 0eval: split test . loss 0.000000e+00. error 3.59%. misses: 72
这在 SGD 的基础上给出了一个稍微改进的结果。不过,我们还需要记住,通过默认参数也有一点权重衰减,这有助于对抗过拟合的情况。由于过拟合仍然严重,接下来我引入了一个简单的数据增强策略:将输入图像水平或垂直移动 1 个像素。但是,因为这模拟了数据集的增大,所以我还必须将通道数从 23 增加到 60(我验证了在原始设置中简单地增加通道数并不能显著改善结果):
eval: split train. loss 8.780676e-04. error 1.70%. misses: 123eval: split test . loss 8.780676e-04. error 2.19%. misses: 43
从测试错误中可以看出,上述方法很有帮助!在对抗过拟合方面,数据增强是一个相当简单、标准的概念,但我没有在 1989 年的论文中看到它,也许这是一个出现略晚的创新?由于过拟合仍然存在,我从工具箱里拿出了另一个新工具——Dropout。我在参数数量最多的层(H3)前添加了一个 0.25 的弱 dropout。因为 dropout 将激活设置为零,所以它与活动范围为 [-1,1] 的 tanh 一起使用没有多大意义,所以我也将所有 non-linearities 替换为更简单的 ReLU 激活函数。因为 dropout 会在训练中引入更多的噪声,我们还必须训练更长的时间,pass 数达到 80。最后得到的结果如下:
eval: split train. loss 2.601336e-03. error 1.47%. misses: 106eval: split test . loss 2.601336e-03. error 1.59%. misses: 32
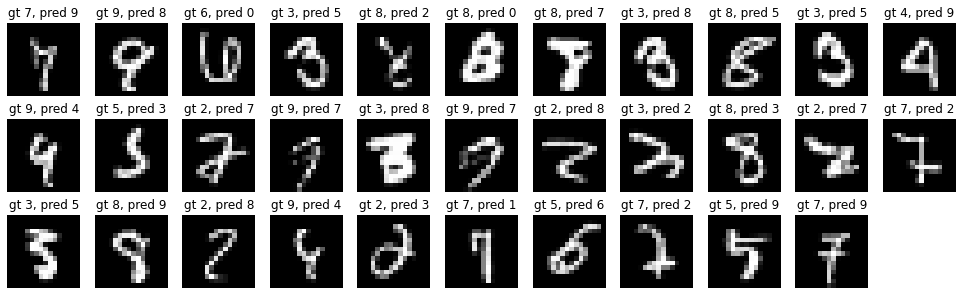
这使得我们在测试集上只有 32/2007 的错误!我验证过,仅仅在原始网络中将 tanh 换成 relu 并没有带来实质性的收益,所以这里的大部分改进来自于 dropout。总的来说,如果我回到 1989 年,我将把错误率降低 60%(把错误数从 80 降到 30 个),测试集的总错误率仅为 1.5%。但这一收益并不是「免费的午餐」,因为我们几乎增加了 3 倍的训练时间(从 3 天增加到 12 天)。但是推理时间不会受到影响。剩下的错误如下:
然而,在完成 MSE → Softmax、SGD → AdamW 的转变,增加数据增强、dropout,以及将 tanh 换成 relu 之后,我开始逐渐放弃那些容易实现的想法,转而尝试更多的东西(如权重归一化),但没有得到实质上更好的结果。
我还试图将一个 ViT 缩小为一个与参数和 flops 数量大致匹配的「微型 ViT」,但它无法与一个卷积网络的性能相媲美。当然,在过去的 33 年里,我们还看到了许多其他的创新,但是其中的许多(例如残差连接、层 / 批归一化)只能在大模型中发挥作用,而且主要用于稳定大模型的优化。在这一点上,进一步的收益可能来自于网络规模的扩大,但是这会增加测试时推理的延迟。
提高性能的另一种方法是扩大数据集的规模,尽管这需要花费一美元的标签成本。这里再贴一下我们的原始基线:
eval: split train. loss 4.073383e-03. error 0.62%. misses: 45eval: split test . loss 2.838382e-02. error 4.09%. misses: 82
由于现在可以使用整个 MNIST,我们可以将训练集规模扩大到原来的 7 倍(从 7291 扩大到 50000)。仅从增加的数据来看,让基线训练跑 100 pass 已经显示出了一些改进:
eval: split train. loss 1.305315e-02. error 2.03%. misses: 60eval: split test . loss 1.943992e-02. error 2.74%. misses: 54
进一步将其与现代知识的创新相结合(如前一节所述),将获得最佳性能:
eval: split train. loss 3.238392e-04. error 1.07%. misses: 31eval: split test . loss 3.238392e-04. error 1.25%. misses: 24
总之,在 1989 年,简单地扩展数据集将是提高系统性能的一种有效方法,而且不会影响推理延迟。
让我们总结一下,作为一个来自 2022 年的时间旅行者,我们从 1989 年的深度学习 SOTA 技术中学到了什么:
首先,33 年来的宏观层面没有太大变化。我们仍然在建立由神经元层构成的可微神经网络体系架构,并使用反向传播和随机梯度下降对它们进行端到端优化。一切读起来都非常熟悉,只是 1989 年的网络更小。
以今天的标准来看,1989 年的数据集还是个「婴儿」: 训练集只有 7291 张 16x16 的灰度图像。今天的视觉数据集通常包含来自网络的几亿张高分辨率彩色图像(谷歌有 JFT-300M,OpenAI CLIP 是在 400M 张图上训练的),而且会增长到几十亿张的规模。每张图像包含的像素信息增长了 1000 倍(384 * 384 * 3/(16 * 16)),图像数量增长了 100,000 倍(1e9/1e4) ,粗略计算的话,像素数据输入增长了 100,000,000 倍以上。
那时的神经网络也是一个「婴儿」:它大约有 9760 个参数、64K MACs 和 1K activations。当前(视觉)神经网络的规模达到了几十亿参数,而自然语言模型可以达到数万亿参数。
当年,一个 SOTA 分类器在工作站上训练需要 3 天,现在如果是在无风扇笔记本电脑上训练只需要 90 秒(3000 倍加速),如果切换到 full-batch 优化并使用 GPU,速度还能提升百倍以上。
事实上,我能够通过微调模型、增强、损失函数,以及基于现代创新的优化,将错误率降低 60% ,同时保持数据集和模型测试时间不变。
仅仅通过扩大数据集就可以获得适度的收益。
进一步的重大收益可能必须来自一个更大的模型,这将需要更多的计算和额外的研究与开发,以帮助稳定规模不断扩大的训练。如果我被传送到 1989 年,而且没有一台更大的计算机,我将无法进一步改进系统。
假设这个练习课程时间上保持不变,这对 2022 年的深度学习意味着什么?一个来自 2055 年的时间旅行者会如何看待当前网络的表现?
2055 年的神经网络在宏观层面上基本上与 2022 年的神经网络相同,只是规模更大。
我们今天的数据集和模型看起来像个笑话,2055 年的二者规模都大约有 10,000,000 倍。
一个人可以在一分钟内训练 2022 个 SOTA 模型,而且是在他们的个人电脑上作为一个周末娱乐项目来训练。
今天的模型并不是最优化的,只是改变了模型的一些细节、损失函数、增强或者可以将误差降低一半的优化器。
我们的数据集太小了,通过扩大数据集可以获得适度的收益。
如果不扩大计算机基础设施和投资相应规模的高效训练模式的研发,就不可能取得进一步的收益。
但我想要表达的最重要的趋势是,随着 GPT 这种基础模型的出现,根据某些目标任务(比如数字识别)从零开始训练整个神经网络的设置,会由于「微调」而变得落伍。这些基础模型由那些拥有大量计算资源的少数机构进行训练,大多数应用是通过对网络的一部分进行轻量级微调、prompt engineering,或是通过数据和模型蒸馏到更小的专用推理网络的 optional step 来实现的。
我认为,这一趋势在未来将十分活跃。大胆假设一下,你根本不会再想训练一个神经网络。在 2055 年,你可以用说话的方式去要求一个 10,000,000 倍大小的神经网络大脑去执行一些任务。如果你的要求足够明确,它就会答应你。
当然,你也可以自己训练一个神经网络,但你为什么要这么做呢?
原文链接:https://karpathy.github.io/2022/03/14/lecun1989/
![]()
公众号后台回复“数据集”获取60+深度学习数据集下载~
备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~
觉得有用麻烦给个在看啦~
![]()