【泡泡一分钟】基于建筑立面对称性的语义分析(3dv-56)
每天一分钟,带你读遍机器人顶级会议文章
标题:Symmetry-aware Facade Parsing with Occlusions
作者:Andrea Cohen, Martin R. Oswald, Yanxi Liu, Marc Pollefeys
来源:3dv 2017 ( International Conference on 3D Vision)
播音员:丸子
编译:颜青松(78)
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

在城市之中,房屋建筑表面大多具有对称性和重复性等特殊性质。本文在此基础上提取一种高效的语义分析方法,使用这些规则化特征来帮助对建筑物立面影像进行语义分析。本文的语义分析基于一些常见的建筑约束,以及重复纹理和边缘信息。除此之外,建筑物的对称性使得我们能够处理有大量遮挡的立面,可以恢复出较为可靠的立面影像。
实验表明,在带有遮挡的数据集上,本文的算法达到了目前最优的语义分析精度。同类的其他方法大多无法处理大面积遮挡,或在效率上和本文的方法有一个数量级的差距。
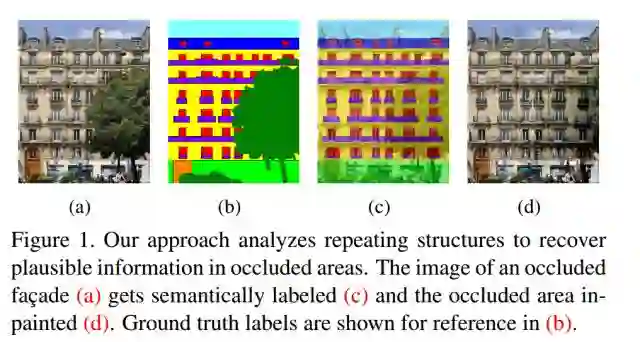
下图展示了本文利用建筑物里面的额对称信息对遮挡区域进行恢复,并进行语义分析的一个效果图。
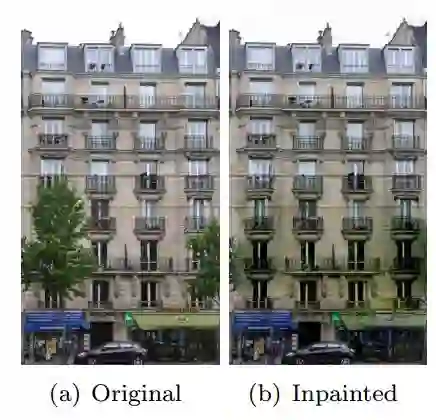
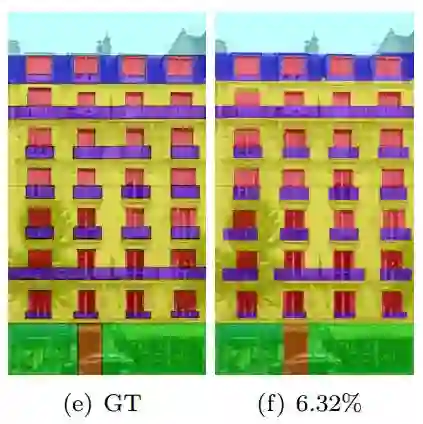
本文所展示的另外一组实验数据。Original是原始数据,Inpainted是根据对称信息去除遮挡的立面影像。(e)GT是真实语义分析结果,(f)是本文的语义分析方法错误百分比。
Abstract
Symmetries and repetitions are common and valuable features in urban scenes. We propose to leverage such regularity information in an efficient optimization scheme in order to segment a rectified image of a facade into semantic categories. Our method retrieves a parsing which respects common architectural constraints as well as detected repetitive structures and edge information. Additionally, the use
of symmetry information allows us to efficiently deal with large occluded areas and to recover plausible facade images with a minimum of occlusions.
Our approach yields state-of-the-art accuracy on datasets with challenging occlusions. Competitive works either fully fail to deal with large occlusions or they are an order of magnitude slower than our approach.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
在【泡泡机器人SLAM】公众号(paopaorobot_slam)中回复关键字“3dv-56”,即可获取本文下载链接。

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com