使用Unity ml-agent进行深度强化学习

本文为 AI 研习社编译的技术博客,原标题 :
Deep Reinforcement Learning using Unity ml-agents
作者 | João Ramos
翻译 | 通夜 编辑 | 王立鱼
原文链接:
https://towardsdatascience.com/deep-reinforcement-learning-using-unity-ml-agents-8af8d407dd5a
注:本文的相关链接请访问文末【阅读原文】
大家好 !
上周,我和我的两个同事,佩德罗·昆塔斯和佩德罗·卡尔代拉做了一些实验,使用的是Unity的ml -agents,我认为这是一个伟大的时刻,与社区分享我们的结果,并向你展示如何扩展你的强化学习知识。
如果你不知道Unity ml-agents是什么,让我给你一个简单的介绍。Unity ml-agents是一个“用游戏和模拟环境来训练智能体的开源Unity插件,”。在我看来,这是一个可以对开始学习深度学习和强化学习来说很好的框架,因为它可以看到正在发生的事情,而不仅仅是在终端上看到数字和字母。
在开始展示我们的小项目之前,让我先展示一下框架已经创建的一些场景。
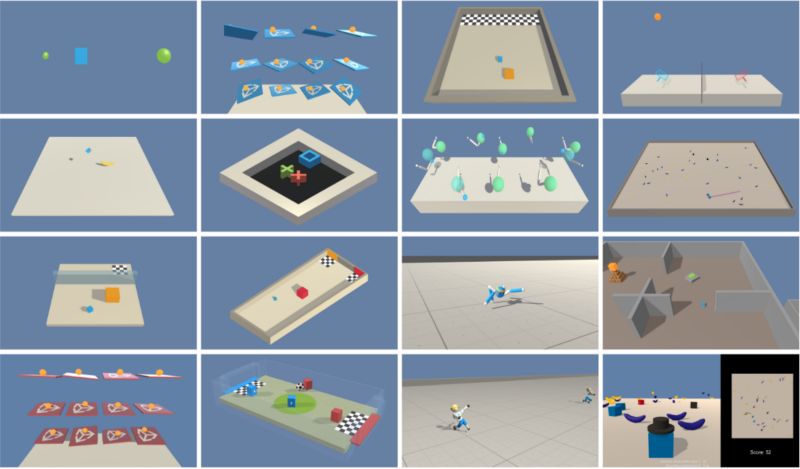
好了,现在您已经了解了这个工具的功能和外观,让我们来讨论一下这个项目!
我们使用了Unity ml-agents创建的一个智能体。它基本上是一只蜘蛛,但只有四条腿。然后我们为这只小“蜘蛛”创造了一个移动平台来让它四处移动。
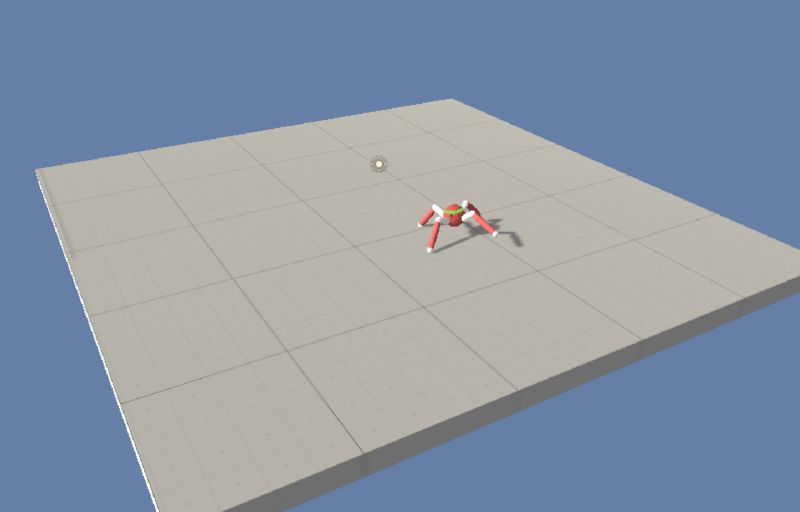
那只是Unity的搭建,让我们谈谈强化学习吧!一开始,和往常一样,蜘蛛(agent)只知道它在平台上的位置和方向。因为我们的目标是让两只蜘蛛互相争斗(不告诉它们该做什么),所以他必须设法教它们。这时强化学习就开始起作用了。我假设在读这篇文章的你知道强化学习背后的基本理论。如果你是新手,这里有一个初学者指南:
https://skymind.ai/wiki/deep-reinforcement-learning
所以,就像任何一个普通的“愚蠢的智能体”一样,我们必须“教”它。我们通过当他们有好的行为时给予好的奖励,当他们有坏的行为时给予坏的奖励来教我们的智能体。经过反复试验,智能体们终于学会了如何站立和行走!基本上,每次他们的身体接触到地面,我们都会给他们不好的奖励。因为如果它们的身体在地上,这意味着它们的四条腿不在地上,或者它们的腿没有产生足够的力。(他们应该站起来)。通过给坏的奖励,我们告诉他们这些行为不好,他们应该避免。
让我们概括一下到目前为止我们所做的:
-我们使用ml-agents创建了一个Unity环境。
-我们教我们的蜘蛛站起来,平衡它的脚来走路。
下一步是教他们打架!为了改变蜘蛛的行为使它们能够战斗,我们必须改变它们的奖励。所以,如果其中一只蜘蛛离开了平台,或者被尸体碰在地上,它将会得到一个非常糟糕的奖励。
另外,如果当它们做了我们想让它们做的,而我们没有给它们一个好的奖励,它们就不会继续重复那些行为。所以当一只蜘蛛面对另一只蜘蛛时,我们给了它们很好的奖励,当蜘蛛朝着另一只蜘蛛的方向前进时,我们给了它们更好的奖励。这使得两只蜘蛛朝着另一只蜘蛛的方向前进,在某个时候,其中一只蜘蛛会把另一只蜘蛛扔出平台。(这只是一个简单的例子来证明我的观点)
此外,他们自己也学会了用拳头把对方打在地上就能赢。所以在同一时刻,他们开始“摔跤”。这是一个非常有趣的观察。
此外,我们还用一个移动平台测试了我们的智能体,以创建一个更困难的环境:
如果你想复制我的结果,这里有更多关于我的可观察向量和奖励函数的信息:
可观测向量
agent关于自身的信息:
- agent关于其关节的信息
- agent在平台上的向上和向前向量
- agent在平台上的位置
关于对手的信息:
-对手身体的向上和向前的矢量
-对手在平台上的位置
奖励函数
智能体不能站起来应该受到惩罚,使得对手摔倒应该得到奖励,这是智能体的主要目标。
智能体从平台上摔下来应该受到惩罚,但不应该得到奖励。我们希望智能体们学习的战斗方法,不包括以特定的方式击溃平台来让对手稍微早一点倒下。
智能体应该因为去推对手而得到奖励,应该因为抽离或让自己被推而受到惩罚。这奖励了一种积极的战斗风格,惩罚了更多的逃避风格,包括逃跑。
基于前面的几点,我们创建了如下的奖励:
如果代理在地板上:-1.0分
如果对手在地上:1.0分。
如果代理不在平台上:-1.0分
0.003*(标准化的速度*(对手位置-智能体位置)) +0.001*(前进的标准化矢量*(对手位置-智能体位置))
最后,我们尝试更进一步,使用类人机器人作为智能体。难度呈指数级增长,因为蜘蛛有8个关节,而类人机器人有12个。这增加了可能的组合动作的总数。所以,我们最终并没有得到惊人的结果,但这看起来很有趣:
总之,Unity ml-agents允许您非常容易地构建一些有趣的东西。我认为这是开始学习这门学科的好方法。请随时与我分享你的问题和结果!
作为这个方向的下一个项目,我想为无人机模拟和自动驾驶创造一个环境。如果你有什么想法,请联系我!
谢谢!
想要继续查看该篇文章相关链接和参考文献?
点击底部【阅读原文】即可访问:
https://ai.yanxishe.com/page/TextTranslation/1632