这5款激光雷达,到底谁能代表自动驾驶的未来?
文 | 大壮旅
来自新智驾(AI-Drive)的报道
ABI Research 认为,2019 年就会有固态激光雷达解决方案问世,到 2027 年市场规模就会扩张至 130 亿美元。
激光雷达是自动驾驶系统中一个非常重要的组件。在许多传统供应商和新创公司看来,未来自动驾驶汽车在障碍探测和 SLAM(实时定位和地图构建)能力上,还是得靠固态激光雷达,因为这才是最节省成本且最可靠的方式。
新智驾总结了目前市面上 5 款激光雷达,来看看到底谁才能代表自动驾驶的未来?
iDAR(AEye)
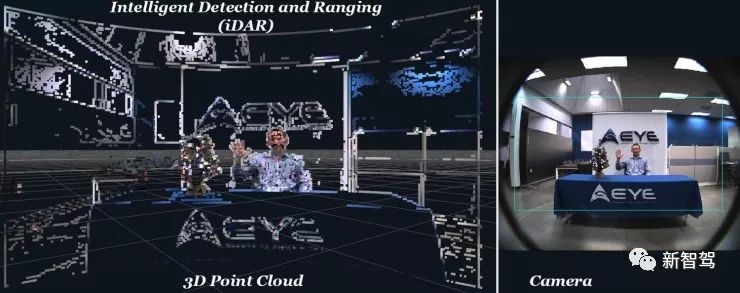
iDAR(Intelligent Detection and Ranging)是 AEye 公司的产品,它是一种新型的智能数据采集形式,可快速动态的完成感知和路径规划等功能。
iDAR 系统中不但有世界上首款敏捷型 MOEMS(微光机电系统)激光雷达,还融合了暗光摄像头和人工智能,创造出可定义软件和可扩展硬件,以适应动态的即时需求。iDAR 不但更精确,其探测范围也更广。同时,更多智能信息也让路径规划更优,自动驾驶安全、性能和成本都有保证。
据新智驾了解,iDAR 可以智能优化并访问同一框架内的共存像素(2D)和立体像素(3D),以此让系统来探测并识别目标。同样的场景下,其效率是只配备激光雷达产品的 10-20 倍。除此之外,iDAR 还能将 2D 图像覆盖在 3D 点云之上,这样我们就有了真正的彩色激光雷达。
有了 AI 的协助,iDAR 还能用上现有的数千种计算视觉算法,路径规划软件工作起来会如虎添翼。iDAR 技术模拟了人类视觉皮层的对焦方式并评估了潜在的驾驶危险:它利用分布式架构和边缘处理来动态追踪目标和感兴趣的对象。
当然,它也没有忘记时刻监视着周边环境。iDAR 平台的关键功能之一就是软件可定义的硬件。iDAR 会增加三个反馈环路(现在还不存在):其中一个在传感器层,一个在感知层,另一个则存在于负责路线规划的软件中。开启了实自定义数据搜集后,系统会根据用户的应用和需求适应环境并对性能做动态调整。
高清 3D LiDAR InnovizPro(Innoviz)

Innoviz 是一家非常年轻的公司,它去年 1 月份才正式诞生。不过,其创始人都是来自以色列国防军的经营技术人员,他们在光电技术、计算视觉、MEMS(微机电)设计和信号处理上都是一等一的高手。现在的 Innoviz 已经拥有超过 100 名员工,在已经完成的两轮融资中拿到了 8200 万美元。
还没满两岁的 Innoviz 已经实现了多个里程碑式的重要进步。举例来说,它与汽车行业鼎鼎大名的一级供应商如麦格纳和安波福(Aptiv)建立了战略合作伙伴关系。
同时,它的首款产品也顺利从原型阶段进入了量产阶段,并与业内领先制造商 Jabil 签订了合作协议。在 CES 2018 上,它将推出首款高分辨率 3D 激光雷达——InnovizPro,为各家自动驾驶厂商提供重量级的“催化剂”。
与此同时,Innoviz 还在研发另一款产品 InnovizOne,这款激光雷达将于 2019 年正式上市,要在性能、可靠性和成本三点上实现完美平衡。
“从成立之初,我们的任务就是要推动自动驾驶汽车大规模商用,现在我们离实现这一目标越来越近了。”Innoviz 公司发言人在一份声明中说道。
S3(Quanergy)

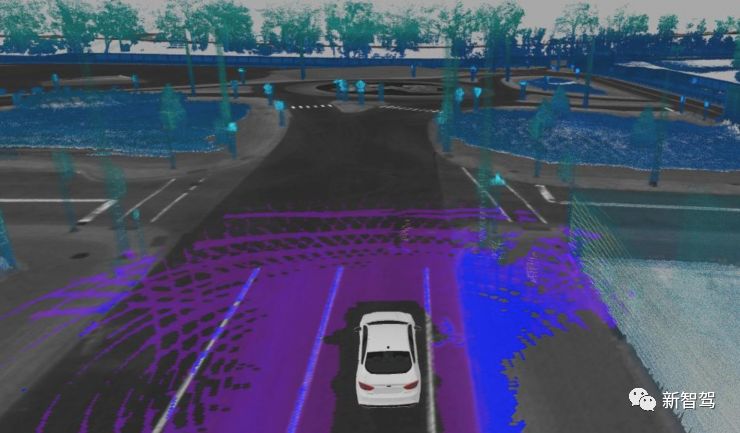
Quanergy S3 是世界上首款车用级固态激光雷达系统。除了用在自动驾驶汽车上,未来 S3 还能广泛应用在工业自动化、机器人、无人机、安防、物联网和智能家居等领域。
除了固态这个独一无二的特性,S3 还有很强的体积优势,整个传感器的外壳只有手掌大,因此可以无缝整合进任何车辆,不会影响外观设计。此外,移除了老式机械激光雷达的活动部件还提升了传感器的性能和可靠性。
通过三个主要零部件的互动,S3 每秒就能生成 50 万个数据点。由于可以扫描到周边每一个角落,因此它能创造一个生动的 3D 视角,帮助车辆探测、分类和追踪场景内的物体。
SLAM on Chip(Renesas & Dibotics)
合纵连横已经成了自动驾驶行业的一大趋势,Renesas 和 Dibotics 也不例外。
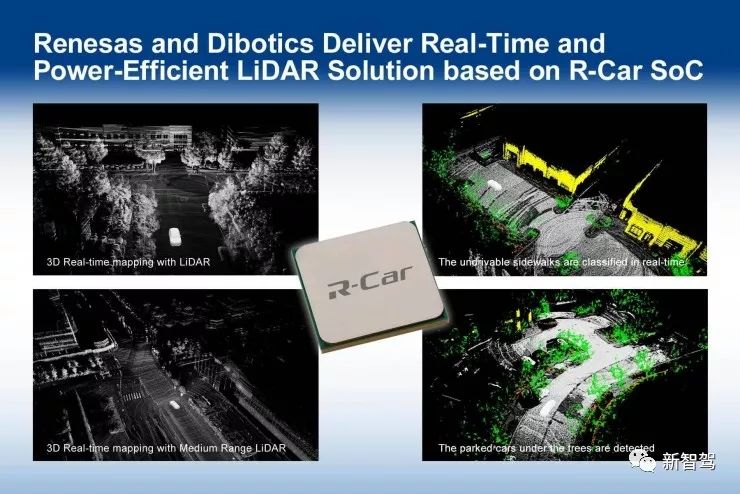
两家公司共同开发了一款解决方案,让系统制造商能研发出实时 3D 地图系统,不但保证了功能的安全性,还有个很低的功耗。
这一解决方案用了 Renesas 的高性能图片处理、低功耗车用片上系统和 Dibotics 的 3D SLAM 技术,两家公司将以上技术整合成了 SLAM on Chip。这一解决方案在 SoC 上应用了 3D SLAM 处理功能,需要强大的高性能 PC 支持。
同时,它还完成了只用激光雷达数据就完成 3D 地图构建的壮举,让惯性测量单元(IMU)和 GPS 数据的存在变得毫无意义。此外,产品的整合、物料成本和开发过程都能向着更好的方向发展。
当然,这套软件还能实现逐点分类,探测和追踪移动目标的形状、速度和轨道并实现多激光雷达融合。
VLS-128(Velodyne)

今年,激光雷达行业领头羊推出了新款旗舰产品 VLS-128。它宣称这是世界上分辨率最高、探测距离最远且视野最广的产品,将推动自动驾驶和 ADAS 市场快速发展。
VLS-128 将代替其 Velodnye 上一代产品 HDL-64,成为激光雷达行业的新标杆。借助海量的实时数据量,VLS-128 将成为全自动驾驶汽车的新标准。
对了,如果你对激光雷达有更多兴趣,2018 年 1 月 16 日,雷锋网新智驾将在硅谷举办 GAIR 硅谷智能驾驶峰会,我们邀请了重磅嘉宾如全球顶级的激光雷达公司 Velodyne CTO Anand Gopalan 进行主题演讲。他是 Velodyne 固态化与 ASIC 研发背后的“关键先生”。更多峰会信息点击
https://gair.leiphone.com/gair/gairsv2018
在体积上,VLS-128 也做了大瘦身,它比 HDL-64 小了 70%,但探测距离翻番,分辨率也提升了 4 倍。从视角、探测距离、分辨率和处理复杂情况的能力来看,它都是当之无愧的激光雷达霸主。
VLS-128 可以在湿润和干燥环境下运行,其基础也是可大规模量产的 CMOS 技术。最关键的是,VLS-128 已经在圣何塞的工厂量产。【完】
欢迎在今日头条、天天快报、UC 头条、一点资讯、新浪微博、搜狐号、网易号关注@新智驾。
推荐阅读:
要统治自动驾驶业务,激光雷达公司TetraVue为何野心如此巨大?
一场峰会看遍中美顶尖智能驾驶技术
2018 年 1 月 16 日,雷锋网新智驾将在旧金山湾区举办 GAIR 硅谷智能驾驶峰会。
中美最强团队齐聚硅谷,圣诞特惠票限时开抢,详情扫描下方海报二维码,或点击「阅读原文」。





