报警啦!他家私藏了一只蹦蹦猴,哦不,蹦蹦机器人
加州大学伯克利仿生微系统实验室曾在去年开发了一款微型仿生机器人——Salto,是当时最小、最敏捷的跳跃机器人。
当Salto身体充分伸展时,长度也仅为26厘米,整个机器人的重量仅100克,在当时,Salto能做到每隔 0.58 秒进行一次高达 1 米的跳跃,其速度达到 1.7 m/s,但因为缺乏平衡能力,只能连续跳跃两次。
不过好消息是:就在前几天,加州大学伯克利分校为我们带来了Salto的升级版——Salto-1p。

Salto | robohunter
我们先来了解下Salto-1p的前身——Salto!
看到这个机器人的时候,大家会想到什么?Salto的外观看上去真的很娇小,一只手掌便能将它握住,像一个踩着弹簧高跷走路的小人儿。在一年前Salto刚露面的时候,有一位YouTube用户曾这样形容Salto的外观:

将Salto和H2Bird组装在一起,你将得到一个蚱蜢机器人。说实话,这是一项了不起的工作!
H2Bird也是伯克利大学分校所设计的一款机器人
还真是非常形象了,但其实Salto的设计灵感来自的是动物界垂直跳跃能力最强的动物——非洲婴猴。非洲婴猴体型很小,最长的种类体长不会超过38厘米,行动敏捷,善于跳跃,一跃可达3~5米。
蹦啊蹦啊蹦
研究人员通过观察婴猴跳跃时的蓄力姿势,肌腱所储存力量后的动作来创造机器人的结构,Salto的结构就是模仿婴猴的,能实现婴猴弹跳能力的78%左右,可实现蹲伏姿势,通过蓄力在“肌腱“中可以让Salto跳得更高。
研究人员还通过比较人在跨越障碍时的姿势和机器人的跳跃来进一步改善结构。

排队蹦蹦
而为了能让Salto在空中跳跃时更加平稳和维持跳跃时的平衡,研究人员在Salto-1p的身体上增加了一对推进器。你能在图片中找到它吗?
Salto

Salto-1p
外观上的改变很明显,那Salto内置的控制端和算法有没有什么改变呢?要知道Salto-1p跳跃的平衡度和着陆点的准确度可是提升了不少!
现在就来探究下~
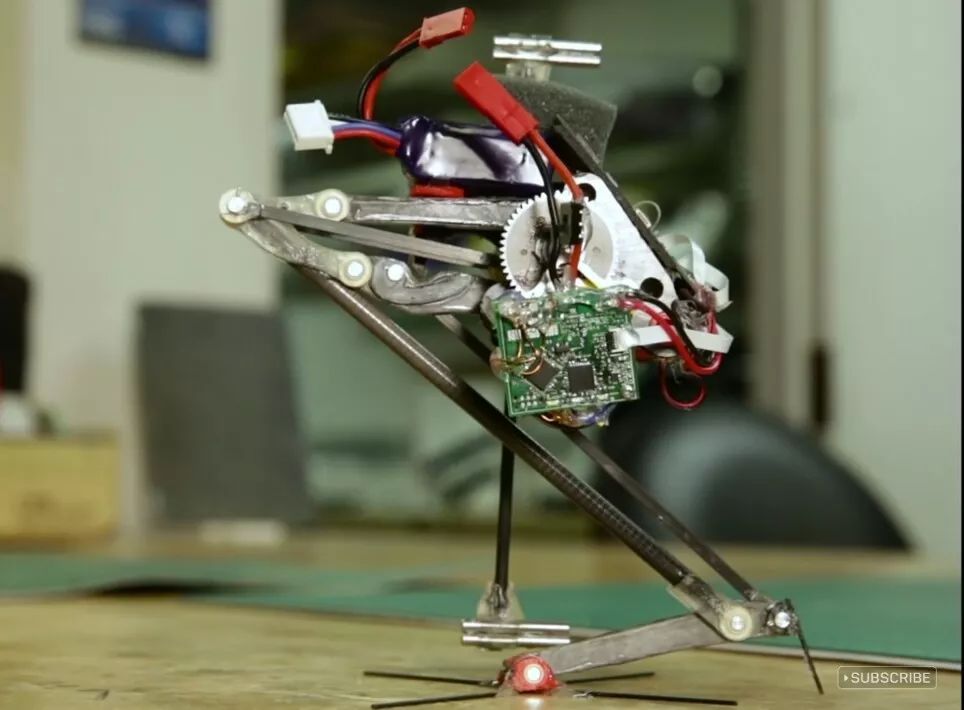
Salto-1p,它的基本硬件与去年相同。
它有一个驱动的弹性腿,可以使它跳跃,一个惯性尾巴,可以旋转来控制俯仰,还有半个四轴飞行器来控制偏航和翻滚。这个机器人能够各处弹跳,能够连续跳跃,没有任何问题。
它可以前进或者后退。
也可以在行进过程中提速,迅速弹跳,爆发力和敏捷性都属上乘;
当然Salto-1p最牛的地方在于它的轨迹可以预测,也就是你可以预先设计好它的每一次落点的位置,大致规划好它的路线,是不是很厉害!
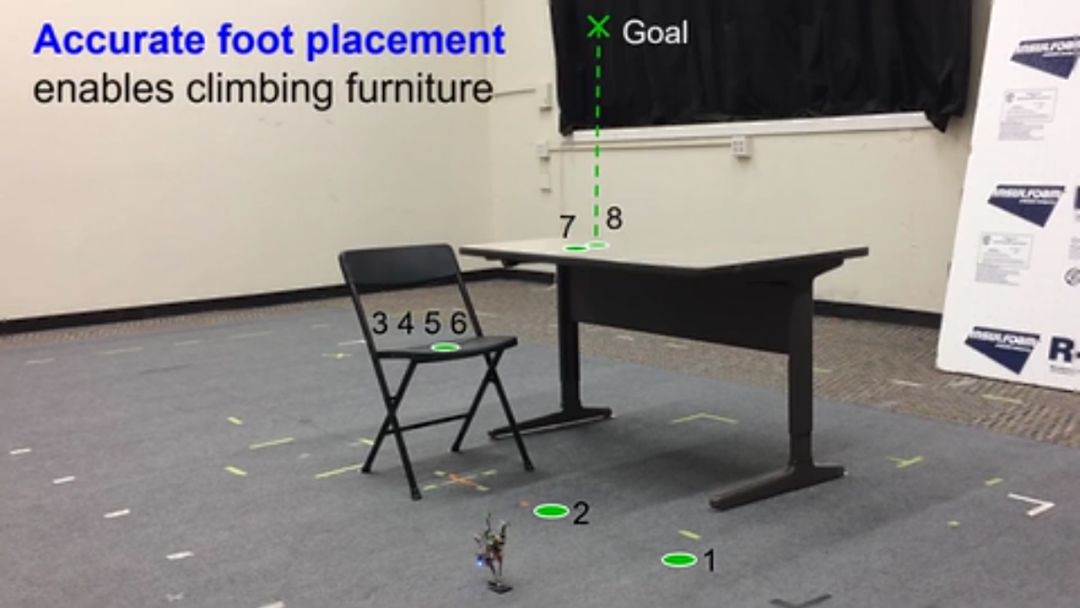
精确的落点
例如像图中这样预先设计好它的大致落点,定好目标点,然后交给Salto-1p.
动作捕捉将会帮忙测量机器人的位置,你可以发现跟预先定好的落点差距并不是很大,就算中途机器人的方向或者落点有偏差,也会快速矫正,重新定向,最终能够到达目标点。
而能做到这一切的原因是因为Salto-1p采用了新的控制器-DFPH(deadbeat foot placement hopping controller)。
Salto-1p机器人的行为或多或少像弹簧倒立——一个简化的动力学模型,经常出现在生物学和机器人的应用中。它有自己的收缩与滑动。DFPH用腿角和收缩来设置机器人的速度,因为它超高的精确度,我们可以告诉Salto-1p它即将要到哪儿去。
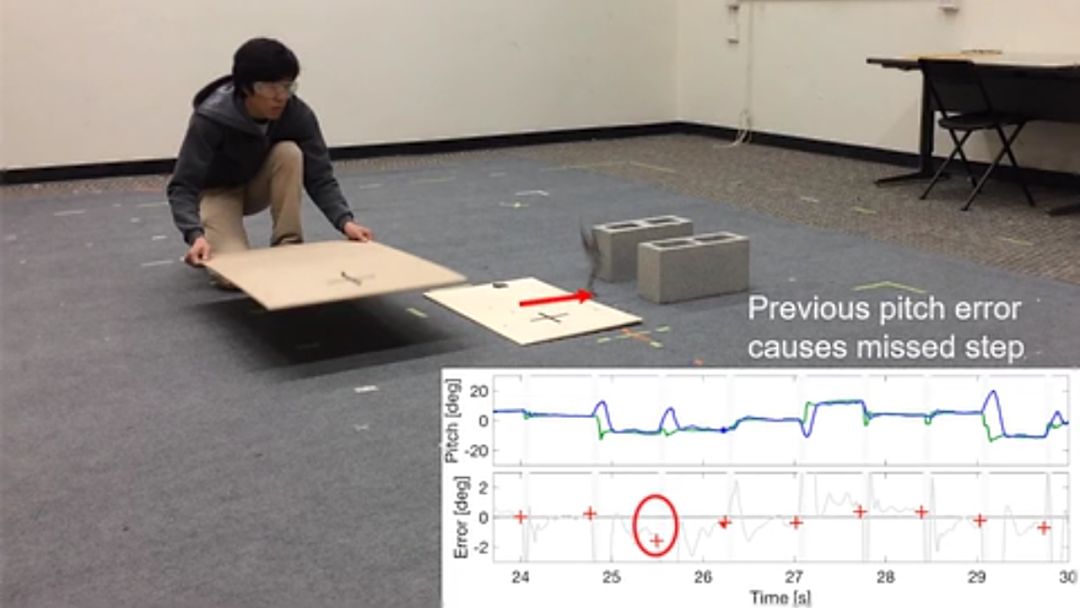
如果我们将Salto-1p行进过程中的腿角记录下来,可以观测到DFPH可以在产生误差后迅速调整好自己的位置,矫正好错误,保证行进路线以及目的地的精准度。

我们可以观察下Salto-1p越碍时的表现。
总的来说,DFPH可以算是Salto-1p的心脏了,毕竟要想使机器人必须能够在椅子上弹跳而不掉下来,这意味着每次跳跃后,它都能或多或少准确地降落在它想降落的地方。更复杂的情况下,比如在墙壁之间跳跃,包括一系列的跳跃,所有的跳跃都需要精确,因为一次不准确的跳跃很可能会导致机器人摔倒并将自己摔成碎片。
Salto-1p的可预测性弹道带来了方便,但也带来了难度,它让我们的大多数控制都来自于Salto-1P着陆时的腿的角度和它的腿的长度。而这一切的难题的解决的关键之处都在于控制器的选择,在研究人员一系列的筛选下,DFPH比之前的控制器要改进了许多。
当然,大家肯定也发现了,Salto-1p在调节自己跳跃的精确度时,越是不怎么平整的路面,就越需要更多的小跳跃来帮助调整,远距离的抛射瞄准目前来说还是很困难的。
Salto-1p具有中低空跳跃高度,能处理移动的物体,不平整或者平坦的路面。但它依然有缺陷,它的研发人员也说,正努力提高Salto-1p的跳跃精度,同时让它脱离外部定位和计算系统,不再仅仅局限于室内。
如果能够做到的话,Salto说不定能够被广泛应用在特殊环境中的一些搜寻、探索等任务,相信未来的Salto-1p更能够被大家所熟知和信赖!
本文经授权转载自机器人大讲堂
(ID:RoboSpeak)
果壳
ID:Guokr42
整天不知道在科普些啥玩意儿的果壳
我觉得你应该关注一下





