【MIT博士论文】非线性系统鲁棒验证与优化,123页pdf
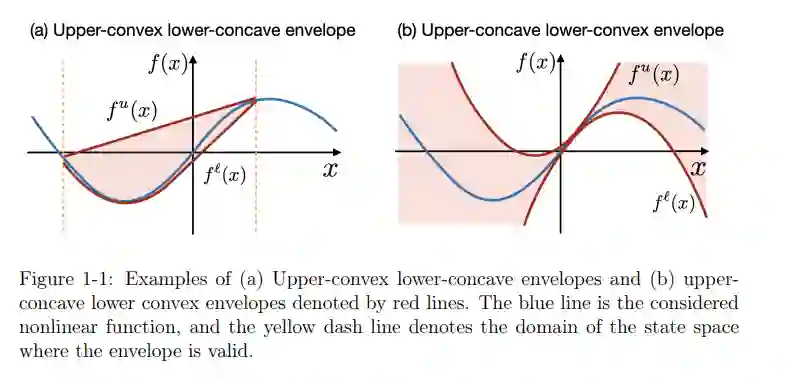
非线性系统允许我们描述和分析物理和虚拟系统,包括动力系统、电网、机器人和神经网络。涉及非线性的问题对在不确定性存在的情况下提供安全保证和鲁棒性提出了挑战。本文提供了利用非线性上界和下界知识的方法,解决了参数不确定的鲁棒性验证和优化问题。本文的前半部分发展了由一组非线性等式和不等式约束定义的非凸可行性集的凸约束。凸约束为求解非线性方程组提供了一个闭型凸二次条件。将原约束替换为所提出的条件,可将非凸优化问题求解为一系列凸优化问题,具有可行性和鲁棒性保证。我们演示了它在模型预测控制(MPC)、神经网络的鲁棒性验证、鲁棒最优潮流(OPF)问题和机器人运动规划中的应用。论文的第二部分关注非线性动力系统,并发展了验证问题的可达性分析和约束输入约束输出分析。我们提供了一种基于优化的方法来计算标称轨迹周围的可达集。提出的方法使用收缩度量为可达集寻找模板。此外,我们开发了约束输入-约束输出分析来表征输入和输出信号的峰值量之间的关系。数值实验证明了它们对一类广泛的非线性系统的适用性。
https://dspace.mit.edu/handle/1721.1/144602
专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“R12” 就可以获取《【MIT博士论文】非线性系统鲁棒验证与优化,123页pdf》专知下载链接


登录查看更多
相关内容
Arxiv
20+阅读 · 2020年3月10日


相关VIP内容
相关资讯
相关论文
Arxiv
20+阅读 · 2020年3月10日