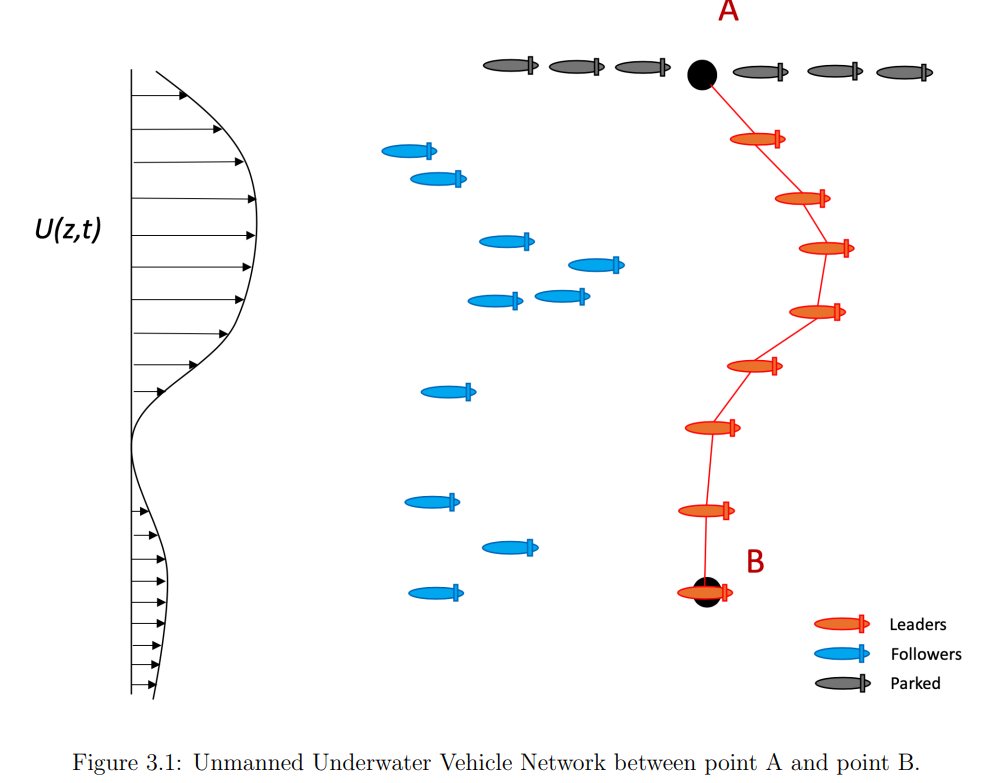
本论文探讨了用于水下无线光学网络(UWONs)的可重新配置无人潜航器(UUVs)集群在不同规模上的基本问题。在集群规模上,提出了制导、导航和控制(GNC)系统,以实现永久性的 UWON。在无人潜航器的尺度上,我们提出开发一种具有高带宽无线通信功能的便携式混合无人潜航器。最后,我们研究了自由空间光学(FSO)系统规模的指向、获取和跟踪(PAT)系统,以实现自由空间激光通信。本论文首先报告了使用两艘 UUV 进行水下激光束中继的演示,以说明 UWONs 的 UUV 集群概念。具体而言,对两艘潜艇模型进行了改装、定位和控制,以便将来自水箱底部激光指示器的激光束反射到所需位置。在论文的第二部分,我们将分散模型预测控制(Decentralized Model Predictive Control)与图论相结合,展示了一种制导系统,该系统能够引导无人潜航器,通过重新配置连续的子网,使无人潜航器始终处于与相邻子网的通信范围内,从而在无人潜航器网络中持续存在一条路径,无限期地转发光信号。制导系统构成了一个分层控制方案的高层模块,其底层是一个自适应反馈线性化控制器(AFLC)和一个扩展卡尔曼滤波器(EKF)。在论文的第三部分,我们介绍了一种便携式混合 UUV,该 UUV 配备了一个 LED 调制解调器,该调制解调器安装在一个方位倾斜系统上,可在波浪槽中实现 7 米范围内的 3.5Mbps 全双工无线通信,尽管 UUV 仍在运动。利用环中软件(SITL)模拟器对 UUV 的混合功能进行了模拟,结果表明 UUV 自动驾驶仪中采用的 AFLC 和 EKF 性能良好。最后,论文的第四部分研究了两种不同配置的 PAT 系统。第一种配置可实现完整的 PAT 功能,但需要对光学机械组件进行精确对准和校准;第二种配置仅可实现跟踪功能,但制造要求较低。