
异构多智能体系统由不同的自主智能体组成,这些智能体可以通过互动和合作来实现复杂的目标。从社会群体的形成到互联网等技术系统的形成,人类历史表明,在相互关联的系统中可以实现更强大的功能。因此,预计人工智能和自主性的进步将导致各种类型的能力越来越强的机器人和软件代理进行互动,以提高其能力。
在物流、救灾和社会关怀等应用中,这些异构智能体可以为系统带来不同的视角、技能和资源,增强系统的适应性、稳健性和创造性。然而,尽管好处多多,人们并不清楚在这种情况下什么是异构性,也不清楚如何在系统设计中将异构性作为一种属性。不回答这些问题,多智能体系统的全部优势就有可能无法实现,其集体行为要么令人惊讶,要么在最坏的情况下对其服务对象造成损害。
本论文探讨了理解异质性在多智能体系统中含义的必要性,以及在系统设计中有效使用不同智能体类型的工具和技术。论文探讨了上下文、任务和智能体之间的交互,以及智能体类型的数量和分布如何影响异质性的定义和衡量异质性的方法。
研究还探讨了一般设计原则,以促进应用程序之间的知识转移,从而减少开发时间和失败风险。研究了基于信息论的 “赋权 ”和 “进化 ”测量方法的应用无关技术,以便在任何类型的智能体之间建立成功的互动。此外,还探讨了多样性的影响、特征和生态框架等概念与人工系统的相关性。
通过更全面地了解多智能体系统中的异质性,本研究有助于开发既能充分利用异质性智能体的优势,又能最大限度地减少因混合智能体类型而产生的潜在负面影响的系统。
主要贡献
-
对异质性进行广泛调查,总结不同作者的处理方法和观点,并对人工系统中异质性的用途和来源进行分类
-
一种分布式控制器,它能使多个牧羊人在不直接通信的情况下进行协调,并使用反应行为(无路径规划)使牧羊人在不分割羊群的情况下在行进路线之间移动
-
证明了在群体任务中使用异构智能体的好处与它们之间的相互作用有关,而且对于同一任务,这些相互作用可能导致更大的异构性对性能有利或不利
-
基于潜在场的人群行为模型,其行为取决于过去的互动,并与群体任务相匹配
-
群策群力任务的绩效与流行的异质性衡量标准之间的相关性
-
证明异质智能体之间的互动类型可导致系统行为发生叠加或突发变化
-
比较解决一维觅食中空间干扰的四种不同机制,包括种群中不同数量的异质性和选择异质性特征的影响
-
将 “赋权 ”发展成一种基于团队的措施,用于基于目标的情景,讨论设计者在将 “赋权 ”应用于真实情景时可能遇到的挑战,并将 “赋权 ”与基于性状的方法进行比较,以解决一维觅食中的空间干扰问题
-
不确定情况下牧羊的解决方案,该方案利用进化来创建可学习其他智能体类型的智能体
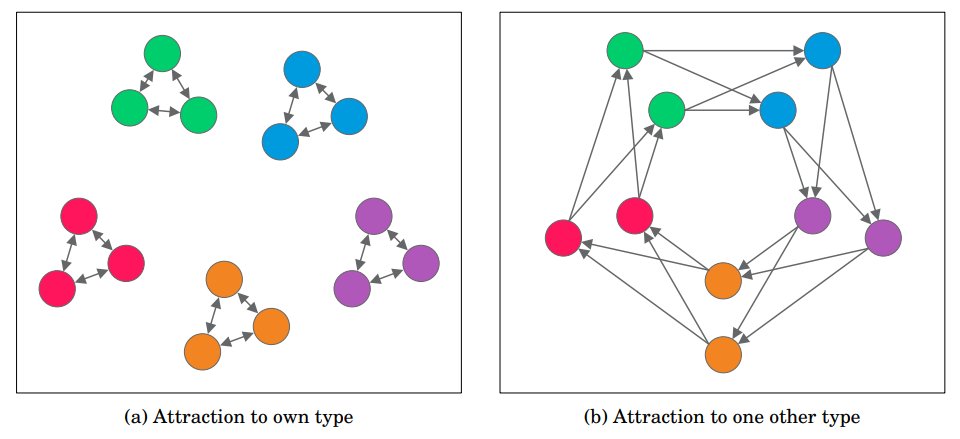
图 3.1: 智能体的互动可以用强度和方向来定义。图中显示了五种类型的智能体和两种类型的社会互动。在 a) 中,互动对象是与该智能体自身类型相匹配的其他智能体,形成双向互动;而在 b) 中,每个智能体都与一种非自身类型的智能体进行社会互动,形成单向互动。如果互动强度为正,智能体就会被其目标群体所吸引,而如果互动强度为负,则会导致智能体被其目标群体所排斥

